Download SURVIVABLE FLIGHT CONTROL SYSTEM INTERIM ... and more Study notes Design in PDF only on Docsity!
AFFDL-TR-71-
SUPPLEMENT -- 2
SURVIVABLE FLIGHT CONTROL SYSTEM
INTERIM REPORT NO. 1
STUDIES, ANALYSES AND APPROACH
SUPPLEMENT FOR CONTROL LAW DEVELOPMENT STUDIES
Robert L. Kisslinger
George J. Vetsch
MCDONNELL AIRCRAFT COMPANY MCDONNELL DOUGLAS CORPORATION ST. LOUIS. MISSOURI
TECHNICAL REPORT AFFDL-TR-71-20 SUPPLEMENT - 2
May 1971 , D C
This document has been approved Jor public release. Its distribution is unlimited.
SAIRFORCE FLIGHT DYNAMICS LABORATORY
AIR FORCE SYSTEMS^ COMMAND
WRIGHT-PATTERSON AIR FORCE BASE, OHIO
Re.roducod bi
NATIONAL TECHNICAL
INFORMATION SERVICE
Spingfield, Va. 22151
AFFDL.-TR-71-
SUPPLEMENT - 2
SURVIVABLE (^) FLIGHT CONTROL SYSTEM
INTERIM REPORT NO. 1
STUDIES, ANALYSES AND APPROACH
StJPPLEMENT FOR CONTROL LAW DEVELOPMENT STUDIES
Robert L.. Kisslinger George J. Veiseb
77tis document has beent approicdfor public tcicase. its distribution is ivilimited.
FOREWORD
This report was (^) prepared by McDonnell Aircraft Company, St. Louis, Missouri, 63166, under Air Force Contract F33615-69-C-1827, PZ05, "Development and Flight Test (^) Demonstration of a Survivable Flight Control System." This contracted effort comprises a major portion of development (^) under the Air Force (^) Systems Command Program No. 680J, "Survivable Flight Control System (SFCS)." The work was administered (^) under the direction of the Air Force Flight Dynamics Laboratory, Wright-Patterson Air Force Base, Ohio, h by Major Robert C. Lorenzetti, Technical Manager.
The report covers work performed between July 1969 and May 1971.
Principal contributor to this supplement (^) was George J. Vetsch under the direction of Robert L. Kisslinger, (^) Senior Project Dynamics Engineer. The authors wish to acknowledge the contributions (^) of B. B. Barnes, H. L. Jeffrie, and D. B. Schaefer of MCAIR, (^) and the SFCES Project personnel of Sperry ?and Corp., Phoenix, Arizona to the information reported herein.
The manuscript was released by the authors (^) in May 1971.
This technical report has been (^) reviewed and is approved.
James W. Morris Program Manager, Survivable Flight Control System Flight Control (^) Division Air Force Flight Dynamics Laboratory
ABSTPACT
The Survivable Flight Control System (SFCS) Program (^) is an advanced develop- ment (^) program of which the principal objective is (^) the development and flight test (^) demonstration of an SFCS utilizing Fly-By-Wire and Integrated (^) Actuator Package techniques. The studies and analyses conducted (^) to date have suffi- ciently defined the system requirements to provide a definition of an approach to the (^) implementation of the SFCS. The results of these (^) studies and the definition of the approach are presented (^) in the basic report. The details of the Control Criteria, and (^) Hydraulic Power and Actuation studies are pre- sented in report supplements (^1) and 3, respectively. The results of the Control Law Development studies are (^) presented in this supplement 2.
As a result of previous fly-by-wire technology development programs, certain guidelines and requirements were specified early in the SFCS design. Those specifications which are relevant to the control law development study are as follows:
o Model (^) following closed-loop control system, utilizing a blend (^) of pitch rate and normal acceleration (^) feedback for the pitch axis, roll rate feedback for the roll axis, (^) and a blend of yaw rate and lateral acceleration for the yaw (^) axis.
o Selectable neutral speed stability with gear up
o Selectable fixed or adaptive gain operation
o Direct electrical link to (^) control surface for emergency operation
o Center stick and sidestick fly-by-wire (^) controllers
o Roll-to-Yaw crossfeed
o Structural (^) mode compensation
o Failure (^) detection and isolation
o Stall (^) warning through increased stick force gradients
o Quadruplex electronics, sensors, secondary (^) actuators and a duplex integrated actuator package (^) in order to provide a two-fail operate capability.
o Mechanical (^) back-up for Phase IIA (pitch and yaw axes only) and (^) no mechanical back-up for Phases IIB and C.
Using the above guideli.nes, (^) this study further defined the system concepts, requirements, (^) and specific techniques to be utilized (^) in the SFCS implementa- tion. (^) During the system synthesis, particular emphesis (^) was placed on system stability, sensor location, gain (^) schedules, appropriate filters, and com- ponent mechanization. (^) Once the system math model was developed, (^) both com- ponent and total (^) system performance characteristics were investigated extensively. In addition to the comprehensive root locus and Bode analyses
iii
TABLE OF CONTENTS
V
Anpendix VI Simulation Hardware^^319
Appendix VII Simulation Software 325
References 333
I' vi
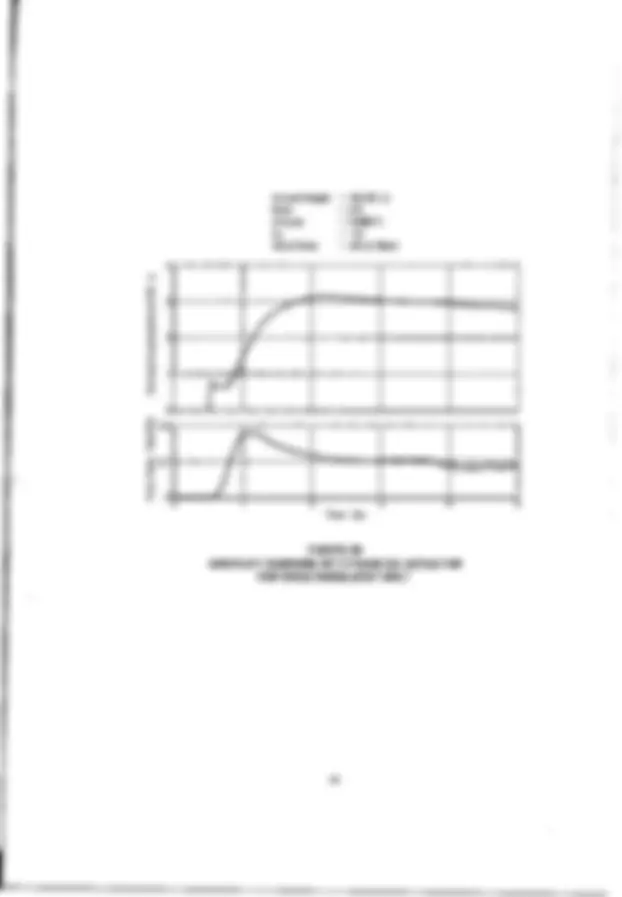
214 Aircraft Response with SSAP Actuator for Stick Force 42
Step Input
- Aircraft Response with SSAP Actuator for Stick Force 43 Step InpuL
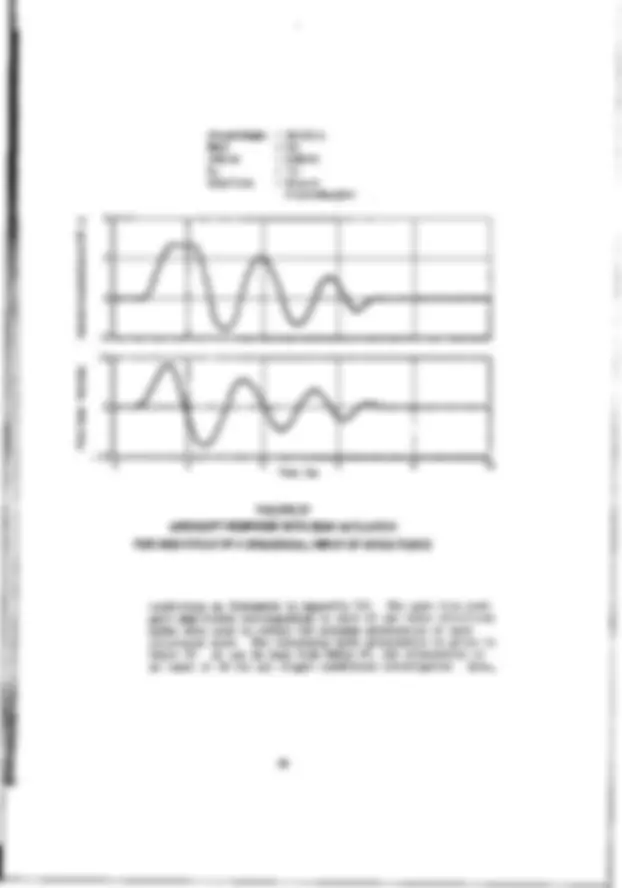
- Aircraft Response with Phase IIA Actuator for 44 Stick Force Step Input
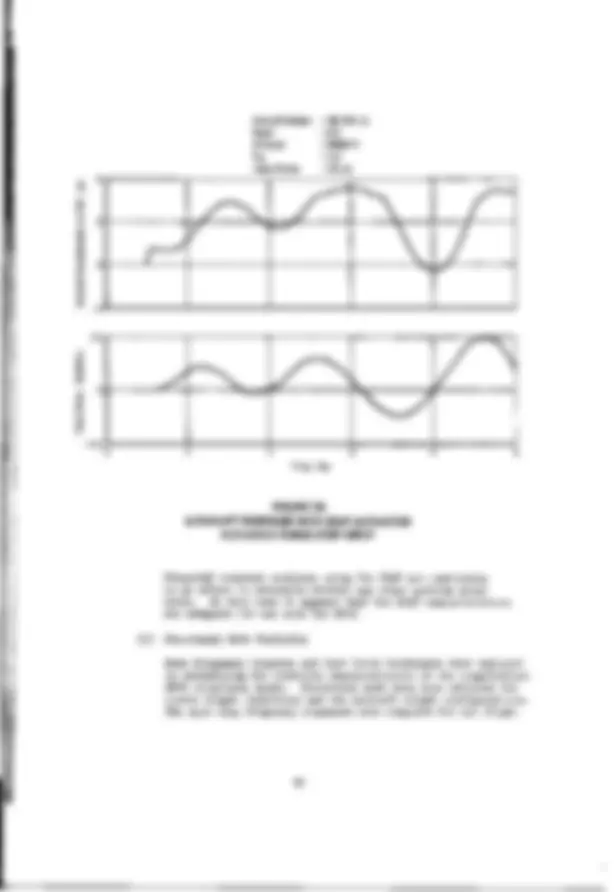
- Aircraft Response with SSAP Actuator for One Cycle 45 of a Sinusoidal Input of Stick Force
28. Aircraft Response to Throttle Doublet Command 49
- 1,ongitudinal SFCS (^) Time History C* Criteria Compliance- 50
Adaptive Gains-NSS (Wt = 38,732 lb)
dC*
- Longitudinal SFCS Time History --- Criteria Compliance- (^51) Adaptive Gains-NSS (Wt=38,32 lb)
- Longitudinal SFCS Time History C* Criteria Compliance- 52 Adaptive Gains-NSS (Wt=43,720 lb) dC
32. Longitudinal SFCS Time History -Criteria Compliance- 53
Adaptive Gains-NSS (Wt=43,20 lb)
33. Short Period Frequencies for Category A Flight Phases- 55
Adaptive Gains-NSS
- Short Period Frequencies (^) for Category C Flight Phases- 56
Adaptive Gains-TOL
35. Short Period Damping Ratio for Category A Flight Phase- 57
Adaptive Gains-NSS
36. Short Period Damping Ratio for Category C Flight Phase- 58
Adaptive Gains-TOL
37. Stick Force per g 60
38. Longitudinal Control System CGmmand vs. Stick Force 61
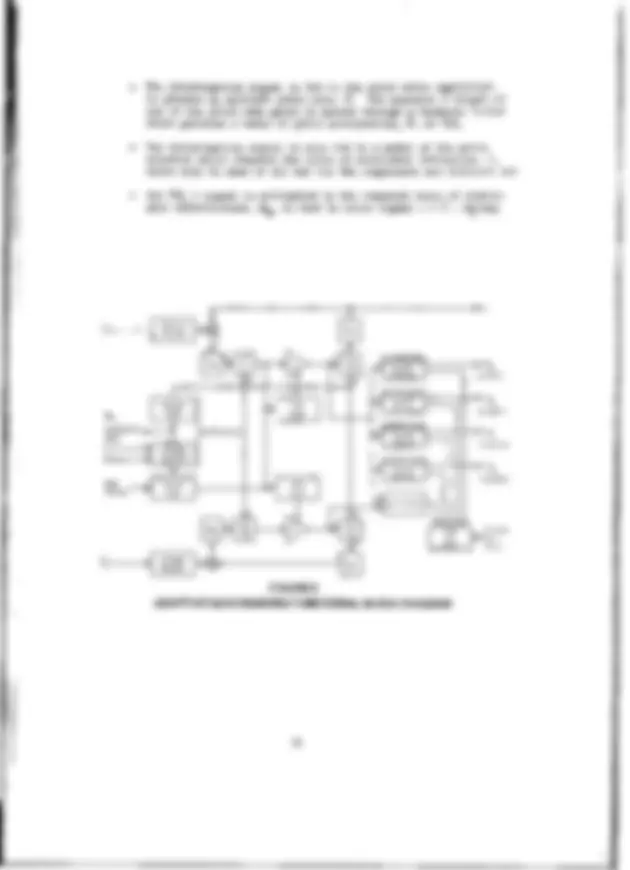
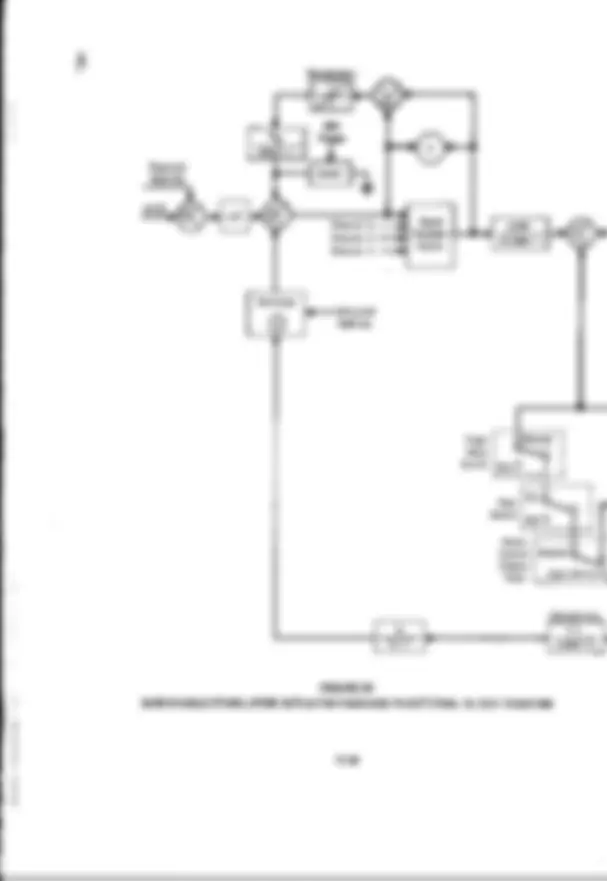
39. SFCS Phase IIA Lateral Axis Functional Block Diagram 65
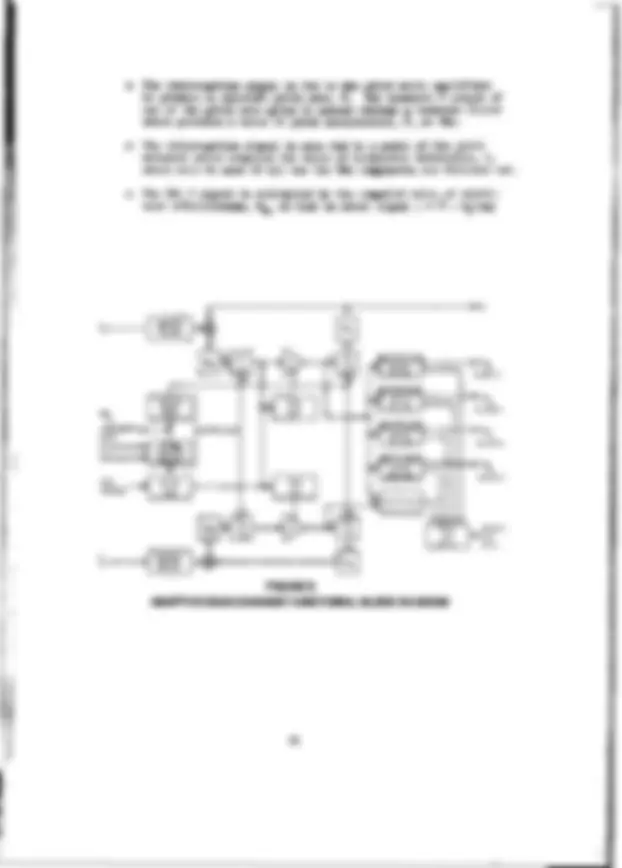
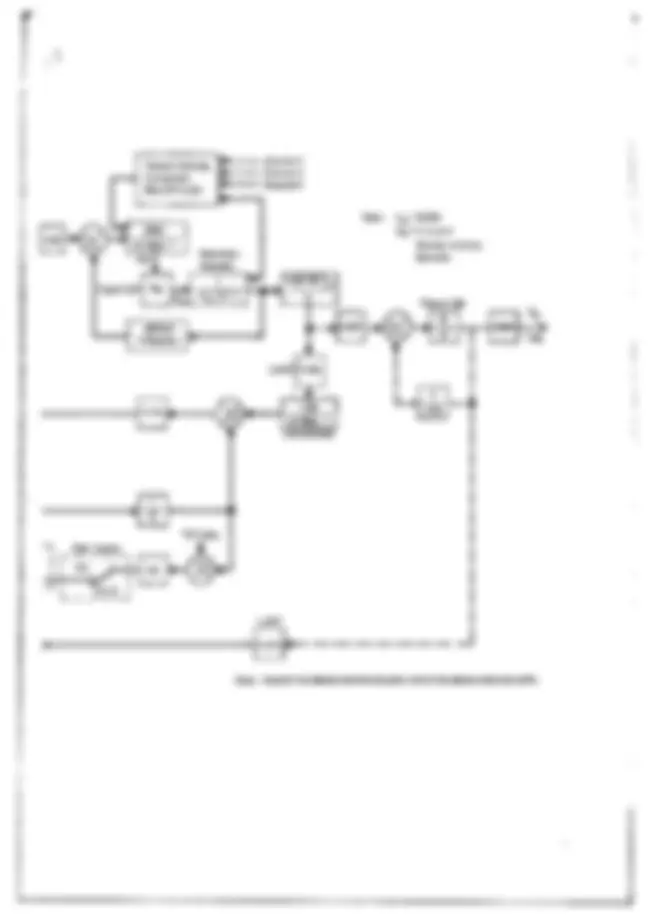
4o. SFCS Phase IIA Directional Axis Functional Block Diagram 69
41. Lateral-Directional Control Lau Block Diagram 73
42. Roll-Rate Loop Root Locus (Single Degree of Freedom) 76
viii
- (^) Roll-Rate Loop (^) Root Locus (Single (^) Degree of Freedom) (^) 77
44. Maximum Steady State Roll Rates
45. Bank Angle At One Second
46. Roll Rate Command vs. Lateral Stick Force Characteristi.3 A
47. Effects of Dutch Roll Damping on Tracking Performance 81
- (^) Yaw Rate (^) Loop Root (^) Locus (M=.5, (^) Alt=5000 ft (^) )
- Yaw Rate (^) Lool Root (^) Locus (M=.5, (^) Alt=25000 (^) ft ) (^) 85
50. Yaw Rate Loop Root Locus (M=.84, Alt=Sea Level)
- (^) Yaw Rate Loop (^) Root Locus (M=1.2, (^) Alt=5000 ft )
- Yaw (^) Rate Loop Root (^) Locus (M=1.8, Alt=55000 (^) ft )
53. Yaw Rate Loop Root Locus (M=2.15, Alt=36000 ft 89
54. Yaw Rate Loop Root Locus (M=.2, Alt=Sea Level)
55. Yaw Rate Loop Root Locus (M=.3, Alt=Sea Level) )
56. Roll Rate Time Constant
57. Roll Rate Per Stick Force
58. Roll Rate Oscillations
59. Normalized Roll Response F-4 With SFCS
60. Normalized Roll Response F-4 With SFCS
61. Normalized Roll Response F-4 With Yaw SAS
62. Normalized Roll Response F-4 With Yaw SAS
63. Dutch Roll Frequency and Damping For Adaptive
Mode Gains (Wt=38,732 lb.)
64. Dutch Roll Frequency and Damping For Adaptive
f (^) Mode 105
Gains(Wt=43,720 lb.)
65. Dutch Roll Frequency and Damping As a Function of
Yaw Rate Gain (KR)
66. Dutch Roll Frequency and Damping As a Function
Yaw Rate Gain (KR) of^107
67. Spiral Stability Characteristics
ix
4
- I Introduction SECTION PAGE
- II Summary
- III Longitudinal Control Law Development - 1. System Description - 2. System Synthesis - 3. Control System Performance Evaluation
- IV Lateral-Directional Control Law Development
- System Description
- System Synthesis
- V Control System Evaluation Simulation - 1. Introduction - 2. Objectives - 3. Hybrid Facility - 4. Software Description - 5. Evaluation Approach - 6. Evaluation of Selected SFCS - 7. SFCS Modifications
- VI Conclusions
- Appendix I Physical Parameters and Aerodynamic Characteristics
- Appendix II Longitudinal Response and Root Locus Analysis
- Appendix III Longitudinal Structural Stability Analysis
- Appendix IV Lateral-Directional Time History Responses
- Appendix V Lateral-Directional Structural Mode Analysis
- SFCS Sideslip Excursion
- SFCS Lateral-Directional D* Response
- Sideslip Excursion-F- 4 With Yaw SAS
- D! Response Variations With Selectable Gains
- Pilot Briefing Sheet
- Longitudinal Airframe Response to 5 Pound Stick Input
- Lateral Airframe Response to 3 Pound Stick Input
- Transition From SFCS Normal Mode to Electrical Back-Up
- Transition From SFCS Normal Mode to Electrical Back-Up t 70 Trim Authority
- Transition From SFCS Electrical Back-Up Mode to Mechanical + 10 Trim Authority
- Transitions Between SFCS Normal and Mechanical Back-Up Modes Back-Up Mode
- Transitions Between SFCS Normal and Electrical Back-Up Modes
- Pitch Axis Single Channel Failure
- Roll Axis Single Channel Failure
- Yaw Axis Single Channel Failure
- Cumulative Distribution of Tracking Error (While Firing) For
- Cumulative Distribution For SFCS Terrain Following SFCS Air-to-Air Task
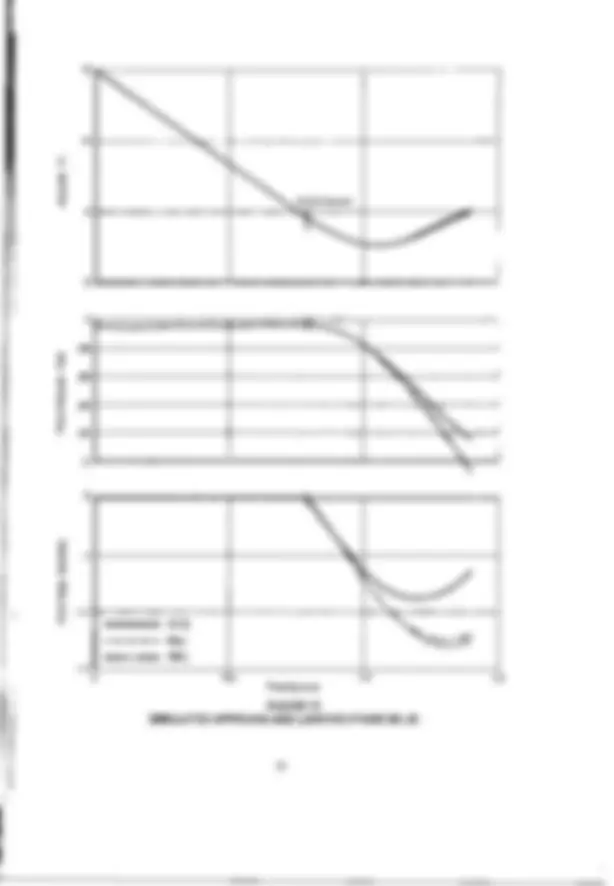
- Landing Approach in SFCS Normal Mode
- Stall Entry and Recovery
- Landing Approach Using Side Stick Controller
- Terrain Following Task, Cumulative Distribution For SFCS
- Small Perturbation Equations of Motion Using Center Stick vs. Side Stick Controller
- Definition of Axis Systems for Small Perturbation Equations
- YF-4E (A.F. SN 62-12200) Operational Flight Envelope
- 9Z. F-4E Physical Data
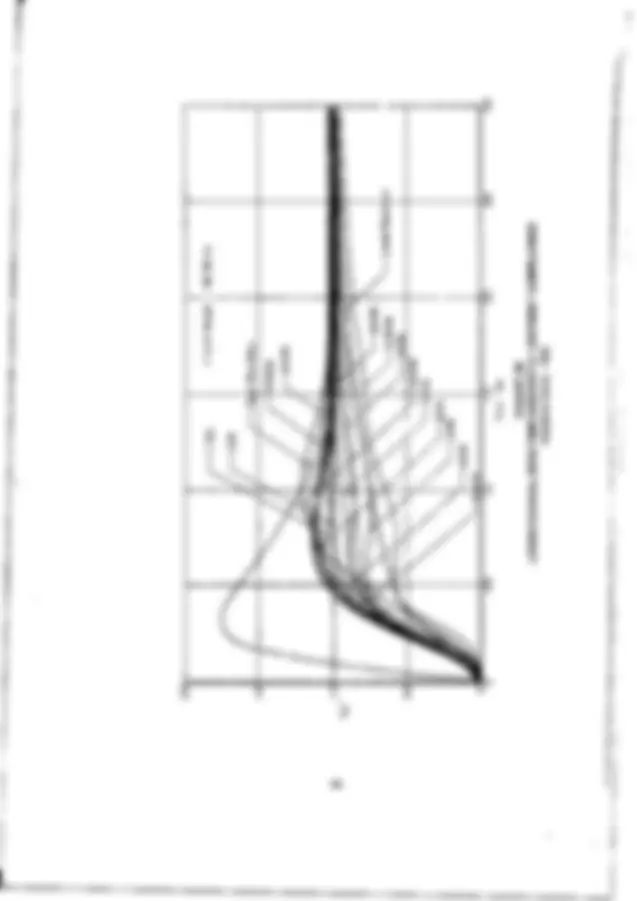
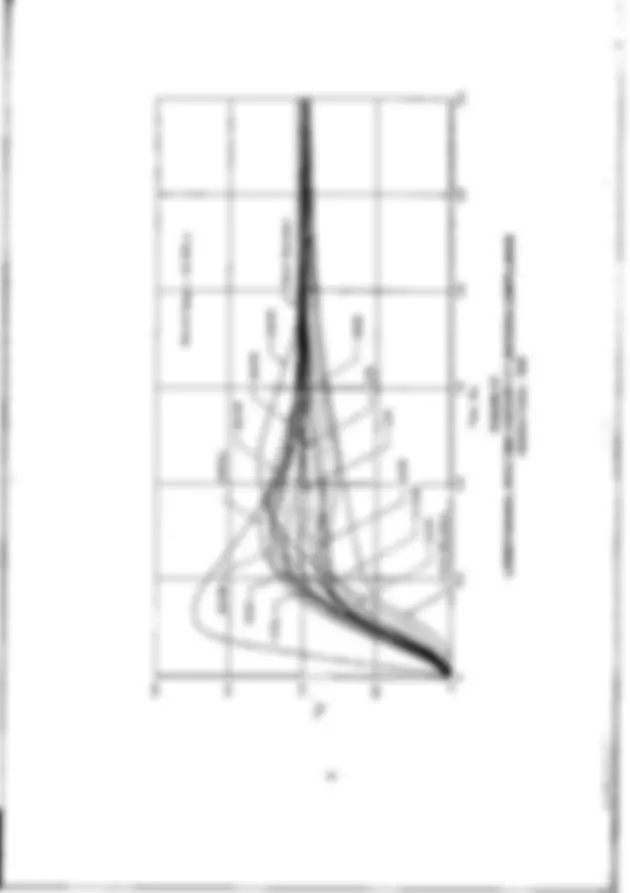
- Open Loop Frequency Response (M=.5, Alt=5000 ft, Wt=38732 ib)
- Open Loop Frequency Response (M=.5, Alt=25000 ft, Wt=38732 ib)
- Open Loop Frequency Response (M=.84, Alt=Sea Level, Wt=38732 lb)
- Open Loop Frequency Response (M=.9, Alt=15000 ft, Wt=38732 ib)
- Open Loop Frequency Response (M=.9, Alt=35000 ft, Wt=38732 ib)
- Open Loop Frequency Response (M=.9, Alt=45000 ft, Wt=38732 ib)
- Open Loop Frequency Response (M=1.1, Alt=Sea Level, Wt=38732 lb)
- Open Loop Frequency Response (M=1.2, Alt=5000 ft, Wt=38732 lb)
- Open Loop Frequency Response (M=1.5, Alt=15000 ft, Wt=38732 ib)
- Open Loop Frequency Response (M=1.5, Alt=35000 ft, Wt=38732 lb)
- Open Loop Frequency Response (M=l.5, Alt=45000 ft, Wt=38732 lb)
- Open Loop Frequency Response (M=1.8, Alt=55000 ft, Wt=38732 lb)
- Open Loop Frequency Resronse (M=2.15, Alt=36000 ft, Wt=38732 ib)
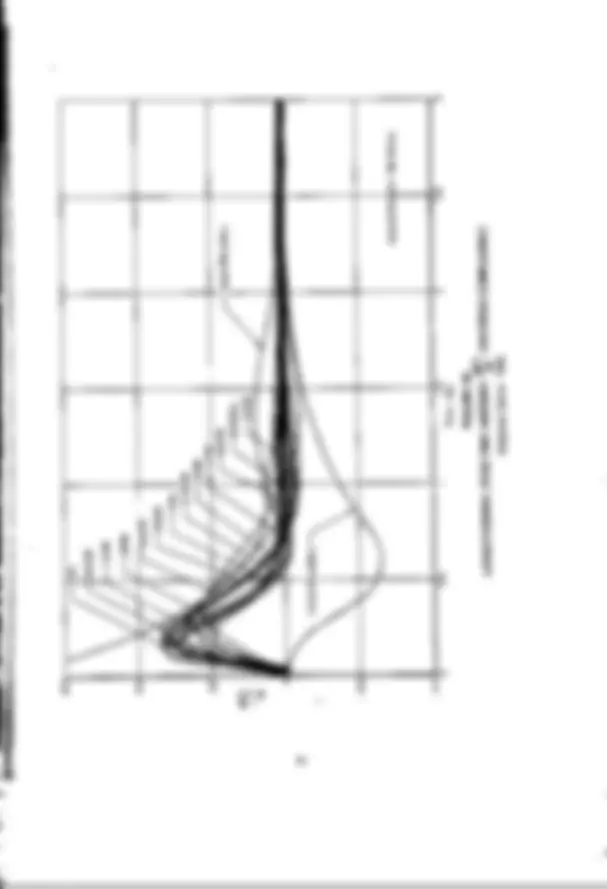
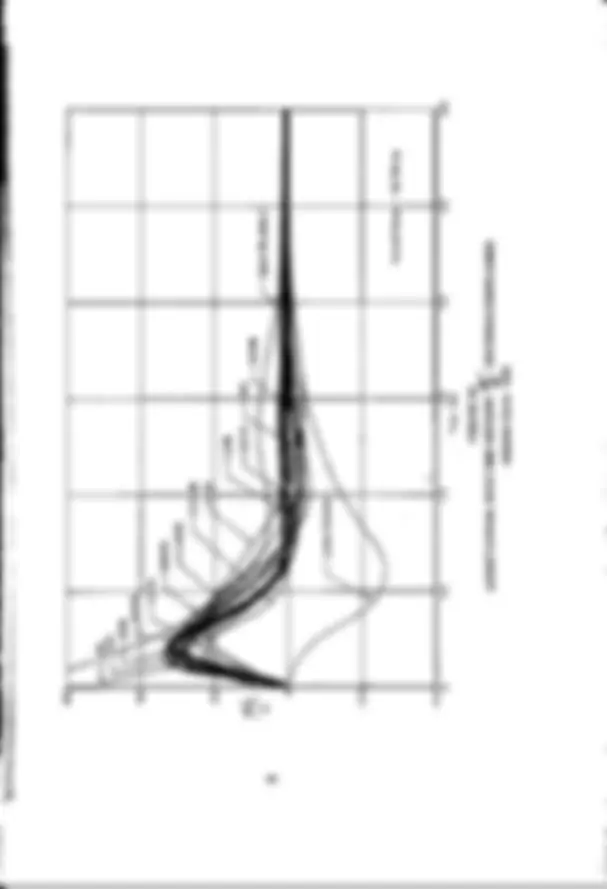
- Open Loop Frequency Response (M=.5, Alt=5000 ft, Wt=43720 lb)
- Open Loop Frequency Response (M.5, Alt=25000 ft, Wt=43720 lb)
- Open Loop Frequency Response (M=.84, Alt=Sea Level, Wt=43720 ib)
- Open Loop Frequency Response (M=.9, Alt=15000 ft, Wt=43720 lb)
- ll. Open Loop Frequency Response (M=.9, Alt=35000 ft, Wt=43720 lb) 1,
- Open Loop Frequency Response (M=.9, Alt=45000 ft, Wt=43720 lb)
- Open Loop Frequency Response (M=l.1, Alt=Sea Level, Wt=43720 lb)
- Open Loop Frequency Response (M=l.2, Alt=5000 ft, Wt=43720 lb)
- Open Loop Frequency Response (M=1.5, Alt=15000 ft, Wt=43720 lb)
- Open Loop Frequency Response (M=1.5, Alt=35000 ft, Wt=43720 lb)
117. Open Loop Frequency Response (M1.5,^ Alt45000^ ft,^ Wt=^43720 lb)^191
118. Open Loop Frequency Response (M=1.8, Alt=55000 ft, Wt= 43720 lb) 19-
119. Open Loop Frequency Response (M=2.15, Alt=36000 ft, Wt=43720 lb) 193
120. Open Loop Frequency Response (M=.206, Alt=Sea Level, Wt= 32500 lb) 194
121. Open Loop Frequency Response (M=.318, Alt=Sea Level, Wt= 32500 b) 194
122. Open Loop Frequency Response (M=.214, Alt=Sea Level, Wt= 43720 lb) 195
123. Open Loop Frequency Response (M=.318, Alt=Sea Level, Wt=^43720 lb) 195
124. Short Period Root Locus (Phase .A, B) Adaptive Gains NSS 196
125. Phugoid Root Locus (Phase IIA,B) Adaptive Gains NSS 196
126. SFCS Longitudinal Control System Resnonse to a Step of 197
Stick Force (Wt=^38732 lb)^ (NSS)
127. SFCS Longitudinal Control System Response to a Step of 199
Stick Force (Wt=43720 lb)(NSS)
128. SFCS Longitudinal Control System Response to a Step of 201
Stick Force (TOL)
129. Responses For Variations in the Accelerometer Lag Filter 203
Break Frequency (M=.5, Alt=5000 ft)
130. Responses For Variations in the Accelerometer Lag Filter 205
Break Frequency(M=1.2, Alt=5000 ft)
131. Longitudinal Aeroelastic^ Equations^ of^ Motion^208
132. Longitudinal Structural Mode Shapes 209
133. Bending Mode Slope vs Fuselage Station^210
134. Frequency Response of /6S Transfer Function 214
135. Frequency Response of Oy,313/6 S Transfer Function U
136. Frequency Response of 17/6A Transfer Function 2J.
.sof 6 9 S
136. Frequency Response of 6M16S M, Transfer Function 215
(^3 8 )
138. Frequency Response of 6M 31 3/^6 S Transfer Function 216
13 9. Frequency Response of 6M 179/6S Transfer Function 216
140. Open Loop Frequency Responses Without Structural Notch 220
Filter (Phase IIA, B)
xii
I
K]
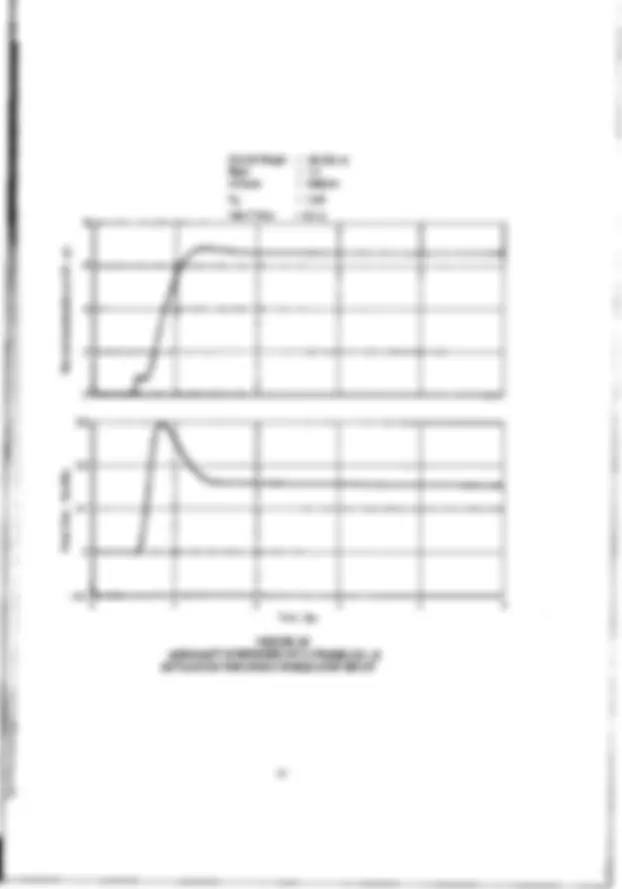
- Dynamic Response to a 3 lb Step of Center Stick Force (^242)
(M=.84, Alt=Sea Level, Wt=38732 ib)
- Dynamic (^) Response to a 3 lb Step of Center Stick Force 243
(M=.9, Alt=15000 ft, Wt= 38732 1b)
162. Dynamic Response to a 3 lb Step of Center Stick Force 244
(M=.9, Alt=35000 ft, (^) Wt= 38732 Ib)
- Dynamic Response to a 3 lb Step of Center Stick Force 245 (M=.9, Alt=45000 ft, Wt= 38732 lb)
- Dynamic Response to a 3 lb (^) Step of Center Stick Force 246 (M=l.2, Alt=5000 ft, Wt=.38732 lb)
- Dynamic Response to a 3 lb (^) Step of Center Stick Force 247
(M=l.5, Alt=15000 ft, Wt= 38732 1b)
- Dynamic Response to a 3 lb Step of Center E ick Force (^248)
(M=I.5, Alt=35000 ft, Wt= 38732 ibJ
- Dynamic (^) Response to a 3 lb Step of Center Stick Force 249 (M=I.5, Alt=45000 ft, Wt=38732 lb)
- Dynamic Response to a 3 (^) lb STep of Center Stick Force 250
(M=l.8, Alt=55000 ft, Wt= 38732 1b)
- Dynamic Response to a 3 lb Step of Center Stick (^) Force 251 (M=2.15, Alt=36000 ft, Wt=:38732 (^) lb)
- (^) Dynamic Response to a 3 lb Step of Center Stick Force 252 M.2, Alt=Sea (^) Level, Wt= 32500 lb)
- Dynamic Response to a 3 lb Step of Center Stick (^) Force 253
(M=.3, Alt=Sea Level, Wt=32500 lb)
- Dynamic Response to a 3 (^) lb Step of Center Stick Force 254 (M=.3, (^) Alt-Sea Level, Wt=43720 lb)
- Dynamic Response to a 16.5 lb Step of Rudder Pedal Force (^255)
(M=.5, Alt=5000 ft, Wt=38732 ib)
- Dynamic Response to a 16.5 lb Step (^) of Rudder Pedal Force 256 (M=.5, Alt=25000 ft, Wt=38732 ib)
- Dynamic Response (^) to a 16.5 lb Step of Rudder Pedal Force 257 (M=.84, Alt=Sea Level, Wt=38732 lb)
- Dynamic Response to a 16.5 lb Step of Rudder Pedal Force (^258) (M= .9, Alt=15000 (^) ft, Wt=38732 lb)
- Dynamic (^) Response to a 16.5 lb Step of Rudder Pedal Force 259
(M= .9 , Alt=35000 ft, Wt=38732 lb)
xiv
- LI
178. Dynamic Response to a 16.5 lb Step of Tudder Pedal Force 260
(= .9, Alt=45000 ft, (^) Wt=38732 lb)
179. Dynamic Response to a 16.5 lb Step of Rudder Pedal Force 261
(M=I.2, Alt=5000 ft, Wt=38732 ib)
180. Dynatuic Response to a 16.5 lb Step of Redder Pedal Force 262
(M=1.5, (^) Alt=15000 ft, Wt:38732 lb)
- Dynamic Response (^) to a 16.5 lb Step of Rudder Pedal (^) Force 263 (M=1.5, Alt=35000 ft, Wt=38732 (^) ib)
- Dynamic Response (^) to a 16.5 lb Step of Rudder Pedal (^) Force 264 (M=1.5, Alt=45000 ft, Wt=38732 (^) lb)
- (^) Dynamic Response to a 16.5 lb Step of (^) Rudder Pedal Force 265
(M=1.8, Alt=55000 ft, Wt=38732 lb)
- Dynamic Response (^) to a 16.5 lb Step of Rudder Pedal Force (^266) (M=2.15, (^) Alt=36000 ft, Wt=38732 lb)
- Dynamic Response to a 16.5 lb (^) Step of Rudder Pedal Force 267 (M= .2, Alt=Sea Level, Wt=32500 lb)
- Dynamic (^) Response to a 16.5 lb Step of Rudder Pedal Force 268 (M= .3, Alt=Sea (^) Level, Wt=32500 lb)
- Dynamic Response (^) to a 10 FT/SEC Sharp Edged Wind (^) Gust 269
(M= .5, Alt=5000 ft, Wt=38732 lb)
- Dynamic (^) Response to a 10 FT/SEC Sharp Edged (^) Wind Gust 270
(M= .5, Alt=25000 (^) ft, Wt=38732 lb)
- Dynamic Response (^) to a 10 FT/SEC Sharp Edged Wind Gust (^271) (M= .84, Alt=Sea (^) Level, Wt=38732 lb)
- Dynamic (^) Response to a 10 FT/SEC Sharp Edged (^) Wind Gust 272 (M= .9, Alt=15000 ft, Wt=38732 lb)
- Dynaxaic Response to a 10 FT/SEC Sharp Edged Wind Gust 273 (M= .9, Alt=35000 ft, Wt=38732 (^) lb)
- Dynamic Response (^) to a 10 FT/SEC Sharp Edged Wind (^) Gust 274 (M= .9, Alt=45000 ft, Wt=38732 (^) ib)
- (^) Dynamic Response to a 10 FT/SEC Sharp Edged Wind Gust 275 (M=1.2, Alt=5000 ft, Wt=38732 ib)
- Dynamic (^) Response to a 10 FT/SEC Sharp Edged (^) Wind Gust 276 (M=1.5, Alt=15000 (^) ft, Wt=38732 lb)
- Dynamic (^) Response to a 10 FT/SEC Sharp Edged (^) Wind Gust 277 (M=1.5, Alt=35000 ft, Wt=38732 (^) lb)
xv
215. Unaugmented Airframe as1/6R Frequency Response Showing 301
Structural Modes sy
216. Open Lateral Loop Frequency Response with Directional Loop 302
Closed (KR = 0.75)
217. Open Directional Loop Frequency Response with Lateral Loop 302
Closed (KR = 0.75)
218. Open Lateral Loop Frequency Response with Directional Loop 303
Closed (KR = 1.50)
219. Open Directional Loop Frequency Response with Lateral Loop 303
Closed (KR = 1.50)
220. Open Lateral Loop Frequency Response with Directional Loop 304
Closed (KR = 3.00)
221. Open Directional Loop Frequency Response with Lateral Loop 30A
Closed (KR = 3.00)
222. Dynamic Response to Laterpl Stick Force (M=.5, Alt=5000 ft, 305
Wt=38732 ib,^ KR=l.5)
223. Dynamic Response to Rudder Pedal Force (M= .5, Alt=5000 ft, 306
Wt=38732 lb, KR=l.5)
224. Dynamic Response to Sharp Edge Gust (M=.5, Ait=5000 ft, 307
Wt=38732 lb, KR=I.5)
225. Dynamic Response to Lateral Stick Force (M=.5, Alt=25000 ft, 308
Wt=38732 lb, KR= .75 )
226. Dynamic Response to Rudder Pedal Force (M= .5, Alt=25000 ft, 309
Wt=38732 lb, KR=.75 )
227. Dynamic Response to Sharp Edge Gust (M=.5, Alt=25000 ft, 310
Wt=38732 lb, KR=.
228. Dynamic Response to Lateral Stick Force (M=.84, Alt=Sea Level, 311
Wt=38732 lb, KR=I.5)
229. Dynamic Response to Rudder Pedal Force (M= .84, Alt=Sea Level, 312
Wt=38732 lb, KR=I.5)
230. Dynamic Response to Sharp Edge Gust (M=.84, Alt=Sea Level, 313
Wt=38732 lb, KR=I.5)
231. Dynamic Response to Lateral Stick Force (M=1.2, Alt=5000 ft, 314
Wt=38732 lb, KR-3.0)
232. Dynamic Response to Rudder Pedal Force (M--3.2, Alt=5000 ft, 315
Wt=38732 lb, KR=3.0)
xvii
- Dynamic Response (^) to Sharp Edge Gust (M=1.2, Alt=5000 ft, (^316) Wt=38732 ib,KR=3.0)
234. Unaugmented Airframe ay 68/ 6 R Frequency Response Showing 317
Structural Modes M.5, Alt=25000 ft, Wt=38732 Ib)
- Unaugmented Airframe ays68/6 (^) R Frequency Response Showing (^317)
Structural Modes (M=.84, Alt=Sea Level, Wt=38732 lb)
236. Unaugmented Airframe -ay,68/6R Frequency Response Showing 318
Structural Modes (M=1.2, Alt=5000 fth, Wt=38732 lb)
237. Waveform of Failure Insertion 325
238. Equations of Motion 327
239. Longitudinal Mechanical Back-Up 330
2h0. Stall Warning Block Diagram 331
xviii