Download Technical Accomplishments - Lecture Notes | AT 400 and more Exams Health sciences in PDF only on Docsity!
URPR Quarterly Report from the University of
Michigan
covering the period of 10 /1/2005 - 12 /3 1 /
1 TECHNICAL ACCOMPLISHMENTS
1.1 Subtask 1: Novel Mobility Platforms – The OmniTread Serpentine
Robot
This quarter we focused on the implementation of features that enable tetherless opera-
tion. These features are: CO 2 tanks with pressure regulator, onboard miniature air com-
pressor, Li-Polymer batteries, and individual track clutches. These features are discussed
in detail, below.
1.1.1 Pneumatic Power Sources
A major development this quarter was our realization that thanks to the dramatically im-
proved performance of the pneumatic bellows, lower-than-anticipated pressures are
needed to actuate them. Specifically, we had anticipated a working pressure of 35 psi, but
we found that full functionality can be achieved with only 20 psi. For comparison: the
pneumatic system in the larger OmniTread OT-8 ran at 80 psi and was fed through a
tether from an off-board compressor.
Earlier in the development of the OT-4 we had ruled out the use of an onboard air
compressor, because compressors of suitable size for the OT-4 were limited to about 25
psi maximal output pressure. However, thanks to the now lowered system pressure re-
quirement of 20 psi, Commercial Off-the-Shelf (COTS) compressors became a viable
alternative for the originally intended source of compressed gas, liquid CO 2 , stored in
tanks on-board. Our intention is now to have a hybrid system, using both stored CO 2 and
compressed air as the power sources. Conceivably, one OT- 4 segment will carry a tank
with liquid CO 2 , and another segment will carry an air compressor.
The two different pneumatic power sources will have strengths and limitations that
can be traded-off in real-time, during a mission. The main strengths of the CO 2 storage
are its immediate available at high pressure and flow rates, as well as its virtually noise-
free operation. The weakness is the obvious limitation of onboard quantities of liquid
CO 2. The main strength of the compressor is that it requires only battery power to run,
without the risk of running out of limited on-board resources other than electric power.
The main disadvantages are the lower pressure and flow rates, as well as the high noise
level associated with air compressors.
The similarity of our proposed hybrid energy storage system to that of storage of en-
ergy for muscles in human beings is noteworthy. In humans, muscles can use two types
of stored energy:
- A large supply of fat that can be converted to muscle energy at a moderate rate and
for moderate levels of muscle activation intensity. This process is called aerobic en-
ergy conversion and the performance of the air compressor in the OT-4 (moderate flow rate and pressure) is similar to it.
- The second energy resource in humans is glucose (derived from carbohydrates in
food). This form of energy is used for high-intensity muscle activation, but it is
available only in very limited quantities and for a relatively short duration. High-
intensity muscle activities mostly consume glucose (and its derivatives) and they are called “anaerobic.” The CO 2 storage system and its use are similar to anerobic
energy conversion in that the CO2 system provides high intensity but only for a
short amount of time before storage is depleted.
Next, we discuss both pneumatic power sources.
1.1.1.1 CO 2 tanks with pressure regulator
In mid-October we ran extensive stair climbing tests using only the CO2 system to oper-
ate the bellows. We found that significant gas usage causes the regulator to get very cold,
which caused the Buna o-rings to harden and leak. We replaced the Buna O-rings with
silicone, which solved that problem. We also increased the pressure sensing piston area
and reduced the O-ring compression. These measures helped reduce pressure control hys-
teresis due to friction and thus yielded more accurate pressure regulation. We also devel-
oped an integral fill valve based on a COTS design that allows the tanks to be filled by
simply removing the idlers from one side of the robot in the CO 2 segment.
Lastly, we integrated a latching solenoid valve into the regulator so that its CO 2 output
can be turned off. This allows us to use the CO 2 or the compressed air from the new air
compressor (see next section) selectively, depending on the operational needs. For exam-
ple, while climbing up inside vertical pipes the highest pressure that the pneumatic sys-
tem will be able to sustain (~40 psi) is needed and can be supplied by the CO 2 system.
Or, if speed is an issue, the high flow rates available from the CO 2 system can fully de-
flect each joint within a few seconds, while the air compressor may need up to 20 sec-
onds if all joints have to achieve
large deflections simultaneously.
Since the valves have an upper
operating limit of ~40 psi at 5
Volts, we installed an over-
pressure relief, which ensures
that the valve can always func-
tion and that even in the case of a
regulator failure (for example, a
high pressure valve leak-through)
the robot pressure cannot climb
high enough to cause damage to
the valves, manifolds, or bellows.
1.1.1.2 On-board miniature air
compressor Figure 1 : Dual Head Compressor installed in an OT-4 segment.
We have tested the pump in the robot and it produced very good results, although it is,
of course, slower than the CO 2.
1.1.2 Dual Drive Motor
In order to increase the drive and climb capabil-
ity of the OT-4, we added a second motor to the
motor segment. While a single, larger motor
would be preferable for increasing torque and
speed, it is not possible to replace the existing
motor with a larger one, because of the drive
shaft spine that runs through the center of each
segment. With our new two-motor design, the
motors are placed in the first and third quadrant
of the segment (i.e., right upper and left lower
diagonal sub spaces).
In our single motor design, used before this
reporting quarter, we sacrificed speed in order to
gain torque, by using a fairly high gear ratio.
This was needed to allow climbing up in vertical
tubes and perform other intense obstacle travers-
als. However, we felt that the maximal drive speed was unacceptably slow with this con-
figuration. The dual-motor design was easy to implement: instead of running a single mo-
tor coupled to the driveshaft with a spur and
pinion gear, there are now two identical motors
mounted on diagonally opposite side of the
driveshaft. The spur and pinion gear ratio has
been reduced since two motors provide ample
torque. The new gear ratio increases speed to a
maximum of ~10 cm/sec. The overall power
consumption has remained almost the same as
with the single motor design. This is because in
the single motor design we strained the under-
powered motor and forced it work in a sub-
optimal speed range.
1.1.3 Li-Polymer batteries
This quarter we researched the availability of
COTS Lithium-Polymer (Li-Pol) batteries, suf-
ficient to provide at least one hour of continu-
ous, untethered operation of the OT-4. Li-Pol
batteries have the highest energy density and
current capacity of any commercially available
type of rechargeable batteries. We found an
ideal configuration in the form of two 7.4 Volt,
Figure 3 : Dual drive motors in the redesigned, more powerful motor segment
Figure 4 : The OT-4 now has on-board Li-Pol batteries. One 900 mAh and one 2 , 000 mAh battery fit into each of two dedicated battery segments. Shown here is a battery segment with its two batteries installed, and the two batteries of the other battery segment laid out in front of the OT-4.
900 mAh batteries, wired in parallel, for the on-board electronics, and two 7.4 Volt, 2,
mAh batteries, wired in series (yielding 14.8 Volt), for the drive motors and the compres-
sor. These four batteries are installed in two of the OT-4 segments. Each such “Battery
Segment” holds one 900 mAh battery and one 2,000 mAh battery see (Figure 4 ). The
balance of this configuration has yet to be tested, and one pack is bound to run out before
the other, but this depends on the given task and terrain. In an initial endurance test, per-
formed before we implemented the dual drive motor configuration, the battery packs
lasted for well over 90 minutes.
1.1.4 Individual track clutches
It is well known that tracked vehicles are significantly less energy-efficient than wheeled
vehicles. While that is a concern for conventional tracked vehicles, it is a huge concern
for the OmniTread, which has tracks on all four sides of each segment. To eliminate this
problem, we conceived of the idea of micro-clutches that would allow engaging or disen-
gaging each track individually, as needed for the particular driving conditions.
We began the design of the micro-clutches one year ago. However, at that early stage
we soon felt that the additional complexity of the clutches would introduce reliability and
robustness problems. For that reason we halted the development and focused on the more
crucial components first. The OmniTread has now reached a state of sufficient maturity
to allow us to revisit the issue of the clutches.
We began this quarter with a com-
plete overhaul of our earlier, less reliable
design for the micro-clutches. Specifi-
cally, we identified three points of weak-
ness in our earlier design and we tried to
address those. The first of these three
points occurs in the coupling of the mi-
cro-motor actuator to the lead screw that
drives the clutch linkages. The micro-
motors come from the manufacturer with
a planetary gear train where the output
shaft is vacuum molded as one part fused
with the final ring gear. Figure 5 shows the disassembled motor with the original stock
parts, the initially designed lead screw, and our newly developed lead screw. Note the
diminutive size of this motor (next to a penny), the gear, and the lead-screw.
By machining the new lead screw assembly from aluminum, we achieved much better
torsional reliability than with the initial design, and superior reparability. If the lead
screw broke in the initial design, the ring gear was unusable; in the event of a failure with
this design, the motor can be disassembled and repaired very easily without replacing any
parts.
Figure 5 : Components of the micro-motor and gear system for the clutch actuator.
ance testing showed that these contacts form an oxide layer after several days that electri-
cally insulated the contact surface. As a result, the switch ceases to signal the microcon-
troller to stop driving the micro-motor actuator, usually resulting in a burned or broken
actuator. The new design implements ultra-subminiature snap-action switches as shown
in Figure 7 B. These COTS switches also provide a more reliable signal to the microcon-
troller, which reduces the complexity of the feedback detection coding.
After verifying in extensive experiments and endurance tests that the new design fea-
tures work well, we manufactured 28 fully functional micro-clutches, for the 28 tracks in
the 7-segment OT-4.
1.1.5 Software for clutches
As described in the proceeding section, each micro-clutch comprises one micro-motor,
and two micro switches that act as limit stops. The clutches are controlled through a small
integrated circuits chip, MPC 17550LV. One smart feature of our control software is that
it constantly monitors which of the four sides of the robot is facing downward. This is
accomplished by a set of accelerometers in the center segment. Using this information,
the software automatically reassigns
designations such as “bottom track” to
the physical tracks that are facing
downward at that moment. This way,
the human operator can issue com-
mands such as “disengage all tracks
except bottom tracks” without having
to think which side of the robot is ac-
tually facing downward.
1.1.6 Specialized Tracks
This quarter we developed a fabrica-
tion method for reinforced tracks.
Like the original OT-4 track, the rein-
forced tracks are made of polyure-
thane, which is formed in a silicone
rubber mold based on a stereolitho-
grapy printed pattern.
We found that under extreme load-
ing situations, such as when climbing
stairs, the normal tracks would stretch
enough to begin skipping over the
teeth of the drive sprocket. Making all
the tracks out of harder polyurethane
was not desirable since harder polyu-
rethane would take more energy to
Figure 8 : The latest OT-4 track design features a spiral Kevlar thread embedded in the molded Urethane track. The Kevlar reinforced track does not stretch at all, thus assuring a good grip on the teeth of the drive sprocket.
Figure 9 : The specialized drive sprocket on the center segment has soft Urethane wheels molded onto its ends, while still allowing slightly narrower tracks to be installed (tracks not shown here).
bend into the long-oval drive shape. Also, in general, harder polyurethane mixtures have
lower surface friction characteristics. Instead we wanted to find a way to reinforce soft
urethane tracks.
After experimenting with different materials we decided on Kevlar as the embedded
fiber for reinforced tracks (see Figure 8 ). Kevlar thread has practically no elongation un-
der load, and a breaking strength five times greater than steel wire of the same diameter.
The multi-strand 0. 35 mm diameter thread we selected deflects easily, and fits well into
the 0.76 mm webbing of the tracks.
We developed another special mold for the reinforced tracks that can be turned inside-
out in two ways. The outer flap of the mold can be turned down to wrap the inner flap
with a five-foot spiral of Kevlar thread. After the polyurethane hardens the inner flap can
be turned down to extract the track without needing to stretch it.
1.1.7 Special-purpose Wheels
While the OT-4’s tracks are excellent for traveling on a variety of terrains, they are not
well suited to travel on the inside of small-diameter cylindrical surfaces, such as inside
pipes. Because of its square cross-section, the non-moving rails along the edges of the
OT-4 tend to rub against the sides of small pipes. Because this is an important special
case we have developed a technique for molding soft polyurethane wheels directly onto
our hard polyurethane drive sprockets (see Figure 9 ). The wheels are taller than the
grousers on the tracks, and keep in constant contact with the inside surface of pipes.
These wheeled sprockets are strategically placed in opposing segments along the robot,
allowing the OT-4 to gain traction in a pipe by pushing against opposite sides of the pipe.
These wheels take up only 5 mm on either side of the drive sprocket, so smaller driven
tracks can still be used in these segments. In preliminary tests using wheeled sprockets
the OT-4 has been able to climb vertically inside a variety of different pipe sizes.
1.1.8 The “Joysnake” Haptic Operator Console (HOC) for Serpentine Robots
This quarter we completed the fabrication
of the Haptic Operator Console (HOC) for
serpentine robots. The HOC consists of
the shapeable, snake-like manual interface,
called “Joysnake,” (as in Joystick) and an
Interface Tray , onto which the Joysnake is
mounted. The HOC tray also houses the
electronics and an array of buttons for in-
voking additional commands or settings
for the OT-4.
In order to complete the fabrication of
the Joysnake, we built the remaining four
segments, for a total of seven segments, as
shown in Figure 10. This work included
the casting the remaining segments; assembling and populating the internal PCB’s with
Figure 10 : The Joysnake hardware is built and assembled
Under fatigue and reliability testing, the neoprene bellows performed better than the
latex bellows. While the latex bellows exhibits greater force output, it tends to fail earlier
in reliability tests. Under cyclic loading, the neoprene bellows can withstand over 3,
repetitions at 30 psi, while the latex bellows could only withstand around 500 repetitions.
For the purpose of comparing bellows features, we defined two indices of perform-
ance, which we call the “nominal efficiency,” En , and the “residual efficiency,” Er. En
measures the actual force versus the theoretical force at nominal length. Er compares the
net force during lifting to the theoretical force during lifting. While we had initially ex-
pected that the latex bellows would perform significantly better with both indices, it
turned out that the two types of bellows performed almost identically. In retrospect, we
believe that this is due to the fact that the nylon mesh (which is the same for both types of
bellows) imposes most of the limitations, not the liner. Another significant advantage of
the neoprene bellows is that the neoprene liner is a COTS product with consistent quality,
whereas the latex liners had to be produced in-house in a time consuming and inconsis-
tent manual process.
After determining that the neoprene bellows are preferable over the latex bellows, we
focused on further performance enhancements for the neoprene bellows. Specifically, we
improved the reliability further by implementing these enhancements:
- The screw-on engagement between the bellows and the end wall was improved by
shortening the depth of the end cap to insure that the maximum thread engagement is
achieved.
- The air leakage containment was improved by placing a thicker O-ring between the
hard end cap and the manifold.
- The reliability of the bellows was improved by increasing the bonding between the
neoprene bellows and the end cap. The new gluing method, which uses high-strength
super glue with JB Wells as reinforcement, provides a strong bond that resists vibra-
tion fatigue.
- In some of the bellows, the mesh was changed from single strand to 1.5 strands, to
withstand greater pressures than the nominal 20 psi. (“1.5 strands” means that we use two strands in one direction of the mesh, and one strand in the other). With pressures
higher than 20-30 psi, we found that sometimes the single strand mesh develops gaps,
through which the neoprene can balloon and fail.
1.2 Subtask 2: Personal
Odometry
This subtask aims at the development
of a self-localization system for walk-
ing persons. Our system, called “Per-
sonal Odometry System” (POS) meas-
ures the location of a walking person
relative to a known starting position.
The unique property of our POS is that
it does not require any external beacons
or markers, such as GPS.
1.2.1 Full implementation of Qua-
ternion Algorithms
In our previous report we presented ex-
perimental results that used a first-order
approximation solution to the problem
of attitude updates based on Quater-
nions. This first approximation showed
overall good results in experiments of
short duration. In experiments of longer
duration, however, we found that the
small approximation errors introduced
with each update could get accumulated
over time, causing large attitude errors.
An extreme example of this kind of er-
ror is shown in Figure 12 a, where the
pitch angle is already affected by these
computational errors after just 40 sec-
onds.
We reviewed the scientific literature
on this subject and found that when the
angular rate vector does not have a
fixed direction, higher-order algorithms
must be used to guarantee accurate atti-
tude estimation. We studied, implemented,
and tested such algorithms and verified
that they successfully solve the problem
described above. As shown in Figure 12 b,
the higher-order algorithm is effective at
eliminating these errors.
In two longer-duration experiments of
14 and 12 minutes duration, we attained
a
b
Figure 12 : Pitch angle estimate with the Quaternion algorithm. In the experiment here the inertial measurement unit (IMU) was pitched up and down repeatedly, in-between short periods of rest at a pitch of 0 °. (a) Using a first order approximation, errors (i.e., final pitch ≠ 0°) can be observed after as little as 40 seconds, in this extreme case. (b) Using higher-order computational algorithms, the pitch error is eliminated. Table I: Summary of results of the longer-duration experiments.
Duration Final Pos. Error
[minutes]
Distance
[m]
Absolute [m]
Relative [%]
Wal k 1
14 1,
X = - 16. Y = 17. Z = - 19.
2.33%
Wal k 2
12 896
X = - 9. Y = 13. Z = 9.
1.83%
entirely reset to the accelerometer-based attitude value. Rather, the system computes an
attitude correction as a combination of the gyro-based attitude estimation and the attitude
computed based on accelerometer readings. The result of this correction method is shown
in Figure 14 b.
1.2.3 Real-time implementation
Most of the algorithms that we developed for our personal odometry system use the Mat-
lab environment as the programming platform. During an experiment, only the data col-
lection is run in real-time, while the actual position estimation was performed off-line
using Matlab.
We have converted our Matlab code into C++ code. This process presented several
challenges, since many of the readily available Matlab functions must be developed from
scratch in C++. A further problem is that Matlab is a matrix-oriented programming lan-
guage and many Matlab algorithms assume that all the sampled data is available. Samples
are treated as large vectors, and Matlab algorithms can usually be applied over the entire
experimental data at once. This approach works well for off-line post processing of col-
lected data. However, in the case of our real-time implementation, data arrives sequen-
tially and our real-time algorithms must be applied using small sequences of data.
In our real-time personal odometry system many computations are executed only once
the “static flag” indicates that the subject’s foot is on the ground, during the stride. How-
ever, data is nonetheless sampled throughout the stride and at high sampling rates. As a
result, multiple large data sets must be mathematically treated, while sampling continues
for the next stride. In order to deal with these real-time constraints, we developed appro-
priate buffering techniques and sequencing techniques. At the end of the reporting quar-
ter, our real-time implementation is fully functional and debugged.
1.3 Radiation Detection and Imaging
1.3.1 Nuclear Resonance Fluorescence.
Nuclear Resonance Fluorescence (NRF) is a process that will occur in any element
with atomic number greater than two. During this process, the incident photon is ab-
sorbed by the nucleus. The absorption occurs at certain resonant energies and the nucleus
is excited. The excited states quickly re-emit photons at the same or different frequencies
in all directions. These photons provide a unique signal characteristic of the nuclear iso-
tope.
Although there is not a complete database for the cross section for this reaction, the
cross section can be approximated well by the Breit - Weigner formula:
4 [( ) ( 2 ) ]
2 2 0
2 2
E E
G
where 2 1
J
J
G
λ = photon wavelength
Γ= total width of the state
E 0 = resonance energy
Er= photon energy
J, J 0 = the angular momentum of the excited and ground state
Nuclear resonance fluorescence is not included in any standard Monte Carlo code. To
understand the feasibility of utilizing this reaction in the nondestructive detection of sen-
sitive nuclear materials, several efforts were made to simulate the process.
- A simple Monte Carlo (MC) code
A simple MC code was written to help understand the effect of nuclear resonance
fluorescence. Typical values of an excited state for an actinide were chosen. Assume, due
to Doppler broadening, the width of the nuclear excited state equals 2 eV, the maximum
of the cross section equals 20 barns, and the nuclear resonance is at 2 MeV.
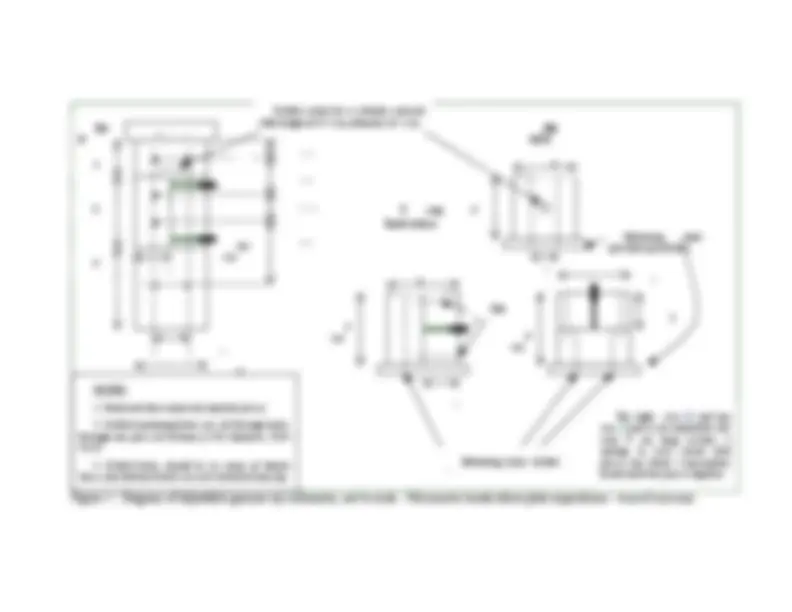
The setup of the simulation is shown below
in figure 1.
The simplifying assumptions were:
a. only one kind of reaction, NRF, was
considered
b. only one excited level in the sample was
considered
c. all de-excitation occurred to the ground
state
d. the detector had 100% efficiency
Several counting results according to differ-
ent thickness of the sample are shown below in figure 2.
Figure 1. Setup of the simulation
notch was widened from several eV to 1 keV. Since the cross section of the Compton re-
action is fairly flat in this energy region, by doing this we didn’t introduce much error.
Under two conditions, poorly
collimated and well collimated, we
changed the maximum energy and
got several transmission spectra.
The results are shown below in Fig-
ure 5 and Figure 6.
Figure 4. The energy spectrum of the source at the cen- ter of the container
00 E+ 00
00 E- 01
00 E- 01
00 E- 01
00 E- 01
00 E+ 00
20 E+ 00
40 E+ 00
9940 E+ 00 1. 9960 E+ 00 1. 9980 E+ 00 2. 0000 E+ 00 2. 0020 E+ 00 2. 0040 E+ 00 2. 0060 E+ 00
010 MeV
050 MeV
500 MeV
000 MeV
Figure 5. The transmission spectra from a poorly collimated source
17
From these two figures, people can tell that under poor collimation, the notch at 2MeV
was almost filled when the maximum energy increased to about 3 MeV. At the same
time, under good collimation, the same notch was still distinguishable when the maxi-
mum energy increased to 6 MeV. So, the conclusion is the notches can survive if we
setup good collimation before the detector.
- Effort made to include NRF into MCNP
Nuclear resonance fluorescence hasn’t been included into the current version of
MCNP. Since the MCNP5 code simulates other reactions like Compton scattering, pair
production, photoelectric effect, etc. very well, it’ll be very nice if we can include NRF
into this widely used MC code.
There are two subroutines in the source code of MCNP5 needed to be modified for
this purpose, ‘photot.F90’ and ‘colidp.F90’. In subroutine ‘photot.F90’, the code interpo-
lates photon-atomic reaction cross sections for each nuclide in current cell (photoelectric,
coherent and incoherent, pair production, and total). The cross section of NRF could be
approximated by a Gaussian function and added to the total cross section. In subroutine
'colidp.F90', the code samples nuclide (based on total cross section) and reaction (based
on partials). If the NRF nuclide is chosen, sample the NRF reaction, and if it is selected,
the gamma is re-emitted in all directions.
These changes have been made to the code. However, I haven’t recompiled the source
yet. Further modification may be necessary and tests need to be run to make sure it
works.
1.3.1.1 Monte Carlo Models of cargo inspection for SNM using NRF
One potential obstacle to the use of nuclear resonance fluorescence (NRF) for nonpro-
liferation purposes is that only photons within a very narrow range of energies (typically
a few tens of meV) are capable of exciting the resonance. In a typical NRF setup, a beam
of photons is directed at the object to be inspected. Detectors on the far side of the object
provide information about the energy spectrum of the photons. The materials present in
00 E+ 00
00 E- 01
00 E- 01
00 E- 01
00 E- 01
00 E+ 00
20 E+ 00
40 E+ 00
99 E+ 00 2. 00 E+ 00 2. 00 E+ 00 2. 00 E+ 00 2. 00 E+ 00 2. 00 E+ 00 2. 01 E+ 00
010 MeV
500 MeV
000 MeV
000 MeV
000 MeV
000 MeV
Figure 6. The transmission spectra from a well collimated source
A basic model of an NRF system has been developed in MCNP. It consists of a
40’ steel cargo container filled with water and containing a 2” diameter sphere of
238 U,
which was chosen because data for its reactions are more easily obtainable than for those
of
235 U. A beam of bremsstrahlung electrons with 9 MeV endpoint energy is directed at
the cargo container. A 2π HPGe detector loaded with a sample of
238 U allows us to de-
termine whether a notch is present. (This arrangement has been proposed by McNabb at
LLNL, with simulations to be published in PRL).
As a first step, the model can be analyzed as a fission system. This will allow us
to compute the number of particles reaching the detector. A comparison between the
cross-sections for fission and for NRF will allow the corresponding number of NRF pho-
tons reaching the detector to be estimated. The model may be ported into GEANT, a
high-energy physics code, in order to take advantage of its path-tracing capabilities.
1.3.1.2 Unfolding the spectrum from HPGe detector
The HPGe detector needed to detector the narrow emissions from NRF has excellent
energy resolution. However, its peak efficiency is relatively low. The unfolding of the
Bremsstahlung
source
238 U sphere
HPGe
detector
spectrum using ML-EM (Maximum Likelihood – Expectation Maximization) method
could improve the full peak efficiency and so improve spectroscopic analysis.
The ML-EM method utilizes a response function of the detector in a process that com-
prises the following steps:
Projecting an i-th estimate of the incident gamma spectrum
Dividing the measured spectrum by the projection of the guess to generate a cor-
rected spectrum
Back-projecting the correction spectrum
Multiplying the back-projected correction by the i-th estimate to create the
(i+1) estimate of the spectrum
Figure 7 shows a measured spectrum from a U-238 sample taken by a 3” by 3” HPGe
detector. The detector was calibrated using calibration sources. Measurement time was 24
hours.
Rij is the response matrix of the system
(^00 200 400 600 800 1000 )
1
2
3
4
5
6
7
8 x^10
6
Energy (keV)
C
o
u
n^ t
s
Figure 7. Spectrum of the delayed photons measured by an HPGe detector