Download The Moving Average System - Project | and more Study notes Digital Signal Processing in PDF only on Docsity!
Name: SOLUTION
Section:
Laboratory Exercise 2
DISCRETE-TIME SYSTEMS: TIME-DOMAIN REPRESENTATION
2.1 SIMULATION OF DISCRETE-TIME SYSTEMS
Project 2.1 The Moving Average System
A copy of Program P2_1 is given below:
% Program P2_ % Simulation of an M-point Moving Average Filter % Generate the input signal n = 0:100; s1 = cos(2pi0.05n); % A low-frequency sinusoid s2 = cos(2pi0.47n); % A high frequency sinusoid x = s1+s2; % Implementation of the moving average filter M = input('Desired length of the filter = '); num = ones(1,M); y = filter(num,1,x)/M; % Display the input and output signals clf; subplot(2,2,1); plot(n, s1); axis([0, 100, -2, 2]); xlabel('Time index n'); ylabel('Amplitude'); title('Signal #1'); subplot(2,2,2); plot(n, s2); axis([0, 100, -2, 2]); xlabel('Time index n'); ylabel('Amplitude'); title('Signal #2'); subplot(2,2,3); plot(n, x); axis([0, 100, -2, 2]); xlabel('Time index n'); ylabel('Amplitude'); title('Input Signal'); subplot(2,2,4); plot(n, y); axis([0, 100, -2, 2]); xlabel('Time index n'); ylabel('Amplitude'); title('Output Signal'); axis;
Answers:
Q2.1 The output sequence generated by running the above program for M = 2 with x[n] =
s1[n]+s2[n] as the input is shown below.
Time index n
Amplitude
Signal #
Time index n
Amplitude
Signal #
Time index n
Amplitude
Input Signal
Time index n
Amplitude
Output Signal
The component of the input x[n] suppressed by the discrete-time system simulated by this
program is – Signal #2, the high frequency one (it is a low pass filter).
Q2.2 Program P2_1 is modified to simulate the LTI system y[n] = 0.5(x[n]–x[n–1]) and
process the input x[n] = s1[n]+s2[n] resulting in the output sequence shown below:
Note: the code is not required; however, it is included here to demonstrate a tricky way of
making the modification to P2_1.
% Program Q2_ % Modification of P1_1 to convert it to a high pass filter % Generate the input signal n = 0:100; s1 = cos(2pi0.05n); % A low-frequency sinusoid s2 = cos(2pi0.47n); % A high frequency sinusoid x = s1+s2; % Implementation of high pass filter M = input('Desired length of the filter = '); % By comparing eq. (2.13) to (2.3), you can see that "num" % actually contains the impulse response (times the constant % M). What we are actually doing in Q2.2 is multiplying the % impulse response of the low pass filter in P2_1 by the % sequency (-1)^n. This shifts the low pass frequency
Q2.3 Program P2_1 is run for the following values of filter length M and following values of the fre-
quencies of the sinusoidal signals s1[n] and s2[n]. The output generated for these
different values of M and the frequencies are shown below.
f1=0.05; f2=0.47; M=
0 50 100
0
1
2
Time index n
Amplitude
Signal #
0 50 100
0
1
2
Time index n
Amplitude
Signal #
0 50 100
0
1
2
Time index n
Amplitude
Input Signal
0 50 100
0
1
2
Time index n
Amplitude
Output Signal
From these plots we make the following observations – with M=15, the low pass
characteristic is much more pronounced (the passband is now very narrow). s2 is still
nearly eliminated in the output signal. s1 is still passed, but at an attenuated level.
f1=0.30; f2=0.47; M=
0 50 100
0
1
2
Time index n
Amplitude
Signal #
0 50 100
0
1
2
Time index n
Amplitude
Signal #
0 50 100
0
1
2
Time index n
Amplitude
Input Signal
0 50 100
0
1
2
Time index n
Amplitude
Output Signal
From these plots we make the following observations – with M=4, this filter performs more
smoothing than in the case M=2. Both s1 and s2 are high frequency in this case, and
they are both substantially attenuated in the output.
f1=0.05; f2=0.10; M=
0 50 100
0
1
2
Time index n
Amplitude
Signal #
0 50 100
0
1
2
Time index n
Amplitude
Signal #
0 50 100
0
1
2
Time index n
Amplitude
Input Signal
0 50 100
0
1
2
Time index n
Amplitude
Output Signal
The output signal generated by running this program is plotted below.
Time index n
Amplitude
Input Signal
Time index n
Amplitude
Output Signal
The results of Questions Q2.1 and Q2.2 from the response of this system to the swept-
frequency signal can be explained as follows: we see again that this system is a low pass
filter. At the left of the graphs, the input signal is a low frequency sinusoid that is
passed to the output without attenuation. As n increases, the frequency of the input
rises, and increasing attenuation is seen at the output. In Q2.1, the input was a sum of
two sinusoids s1 and s2 with f1=0.05 and f2=0.47. The swept frequency input of
Q2.4 reaches a frequency of 0.05 at n=10, where there is virtually no attenuation in the
output shown above. This “explains” why s1 was passed by the system in Q2.1. The
swept frequency input of Q2.4 reaches a frequency of 0.47 at approximately n=94,
where the attenuation of the system is substantial. This “explains” why s2 was almost
completely suppressed in the output in Q2.1.
There is no direct relationship between the result shown above for Q2.4 and the result
obtained in Q2.2. However, using frequency domain concepts (Chapter 3) we can
reason that, if the swept frequency signal was input to the system y[n] =
0.5(x[n] – x[n-1]), we would see a result opposite to what is shown above.
Since the system would then be a high pass filter, there would be substantial attenuation
of the output at the left side of the graph and virtually no attenuation at the right side of
the graph. This “explains” why in Q2.2 the low frequency component s1 was
suppressed in the system output, whereas the high frequency component s2 was
passed.
Project 2.2 (Optional) A Simple Nonlinear Discrete-Time System
A copy of Program P2_2 is given below:
% Program P2_ % Generate a sinusoidal input signal clf; n = 0:200; x = cos(2pi0.05n); % Compute the output signal x1 = [x 0 0]; % x1[n] = x[n+1] x2 = [0 x 0]; % x2[n] = x[n] x3 = [0 0 x]; % x3[n] = x[n-1] y = x2.x2-x1.*x3; y = y(2:202); % Plot the input and output signals subplot(2,1,1) plot(n, x) xlabel('Time index n');ylabel('Amplitude'); title('Input Signal') subplot(2,1,2) plot(n,y) xlabel('Time index n');ylabel('Amplitude'); title('Output signal');
Answers:
Q2.5 The sinusoidal signals with the following frequencies as the input signals were used to
generate the output signals: f=0.05, f=0.1, f=0.
The output signals generated for each of the above input signals are displayed below:
0 20 40 60 80 100 120 140 160 180 200
0
1
2
Time index n
Amplitude
Output Signal
The output signals depend on the frequencies of the input signal according to the following
rules: up to “edge effects” visible at the very left and right sides of the first graph, the
output is given by y[n] = sin
2
(2πf).
This observation can be explained mathematically as follows: Let ω =^2 π^ f. Then
x [ ] n = cos( ω n )and
2 2
x [ ] n = cos ( ω n ) (1.1)
Now, x n [ + 1] = cos[ ω( n + 1)] = cos( ω n + ω) and x n [ − 1] = cos[ ω( n − 1)]=
cos( ω n − ω) , so x n [ + 1] [ x n − 1] = cos( ω n + ω) cos( ω n − ω). Applying the
trigonometric identity cos( A + B ) cos( A − B ) = 12 cos(2 A ) + 12 cos(2 B ), this
becomes
[ 1] [ 1] cos(2 ) cos(2 ).
x n + x n − = ω n + ω (1.2)
Applying the trigonometric identity cos(2 A ) = 2 cos (^2 A ) − 1 to the first term of
(1.2), we obtain
[ 1] [ 1] cos (^2 ) 1 1 cos(2 ).
x n + x n − = ω n − + ω (1.3)
Applying the identity cos(2 A ) = 1 − 2sin (^2 A )to the second term of (1.3) gives
us
2 2
x n [ + 1] [ x n − 1] = cos ( ω n ) − sin ( ω). (1.4)
It follows immediately from (1.1) and (1.4) that
2
2
2
[ ] [ ] [ 1] [ 1]
sin ( )
sin (2 ).
y n x n x n x n
f
Combining the this result with (1.5), it follows immediately that
y [ ] n = sin (2^2 π f ) + 2 K [1 − cos(2 π f )]cos(2 π fn ).
So addition of the constant K to the input cosine signal has the effect of adding
a ripple onto the result that was obtained before in Q2.5. This ripple is a cosine
wave of frequency f and amplitude 2 K [1 − cos(2 π f )],as can be seen plainly in
the graph above.
Project 2.3 Linear and Nonlinear Systems
A copy of Program P2_3 is given below:
% Program P2_ % Generate the input sequences clf; n = 0:40; a = 2;b = -3; x1 = cos(2pi0.1n); x2 = cos(2pi0.4n); x = ax1 + bx2; num = [2.2403 2.4908 2.2403]; den = [1 -0.4 0.75]; ic = [0 0]; % Set zero initial conditions y1 = filter(num,den,x1,ic); % Compute the output y1[n] y2 = filter(num,den,x2,ic); % Compute the output y2[n] y = filter(num,den,x,ic); % Compute the output y[n] yt = ay1 + by2; d = y - yt; % Compute the difference output d[n] % Plot the outputs and the difference signal subplot(3,1,1) stem(n,y); ylabel('Amplitude'); title('Output Due to Weighted Input: a \cdot x_{1}[n] + b \cdot x_{2}[n]'); subplot(3,1,2) stem(n,yt); ylabel('Amplitude'); title('Weighted Output: a \cdot y_{1}[n] + b \cdot y_{2}[n]'); subplot(3,1,3) stem(n,d); xlabel('Time index n');ylabel('Amplitude'); title('Difference Signal');
Answers:
Q2.7 The outputs y[n], obtained with weighted input, and yt[n], obtained by combining the two
outputs y1[n] and y2[n] with the same weights, are shown below along with the
difference between the two signals:
Amplitude
Output Due to Weighted Input: a (^) ⋅ x 1 [n] + b (^) ⋅ x 2 [n]
Amplitude
Weighted Output: a (^) ⋅ y 1 [n] + b (^) ⋅ y 2 [n]
x 10
Time index n
Amplitude
Difference Signal
The two sequences are – the same up to numerical roundoff.
The system is – Linear.
Q2.8 Program P2_3 was run for the following three different sets of values of the weighting
constants, a and b, and the following three different sets of input frequencies:
1. a=1; b=-1; f1=0.05; f2=0.4;
2. a=10; b=2; f1=0.10; f2=0.25;
3. a=2; b=10; f1=0.15; f2=0.20;
The plots generated for each of the above three cases are shown below:
0 5 10 15 20 25 30 35 40
0
200
Amplitude
Output Due to Weighted Input: a (^) ⋅ x 1 [n] + b (^) ⋅ x 2 [n]
0 5 10 15 20 25 30 35 40
0
200
Amplitude
Weighted Output: a (^) ⋅ y 1 [n] + b (^) ⋅ y 2 [n]
0 5 10 15 20 25 30 35 40
0
5
x 10-
Time index n
Amplitude
Difference Signal
Based on these plots we can conclude that the system with different weights is – Linear.
Q2.9 Program 2_3 was run with the following non-zero initial conditions – ic = [5 10];
The plots generated are shown below -
0 5 10 15 20 25 30 35 40
0
20
Amplitude
Output Due to Weighted Input: a (^) ⋅ x 1 [n] + b (^) ⋅ x 2 [n]
0 5 10 15 20 25 30 35 40
0
50
Amplitude
Weighted Output: a (^) ⋅ y 1 [n] + b (^) ⋅ y 2 [n]
0 5 10 15 20 25 30 35 40
0
50
Time index n
Amplitude
Difference Signal
Based on these plots we can conclude that the system with nonzero initial conditions is –
Nonlinear.
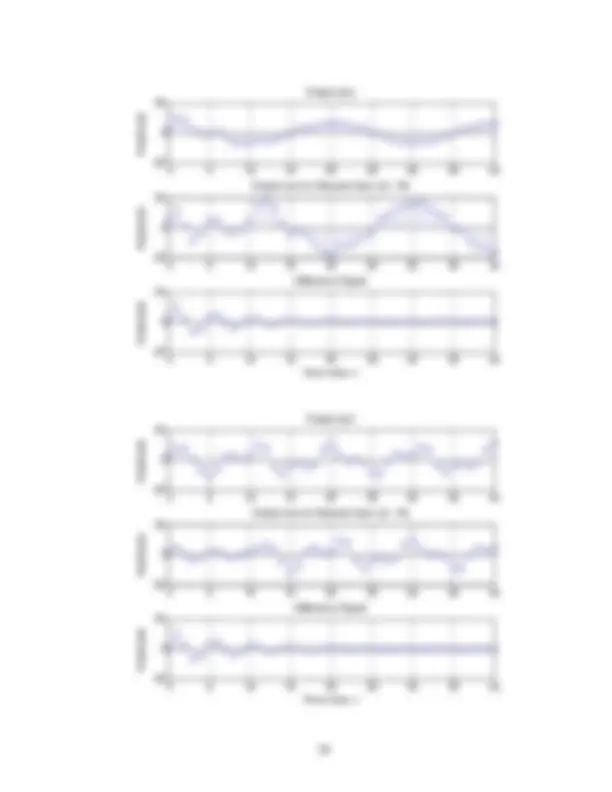
Q2.10 Program P2_3 was run with nonzero initial conditions and for the following three different sets
of values of the weighting constants, a and b, and the following three different sets of input
frequencies:
1. a=1; b=-1; f1=0.05; f2=0.4;
2. a=10; b=2; f1=0.10; f2=0.25;
3. a=2; b=10; f1=0.15; f2=0.20;
The plots generated for each of the above three cases are shown below:
Amplitude
Output Due to Weighted Input: a (^) ⋅ x 1 [n] + b (^) ⋅ x 2 [n]
Amplitude
Weighted Output: a (^) ⋅ y 1 [n] + b (^) ⋅ y 2 [n]
Time index n
Amplitude
Difference Signal
Based on these plots we can conclude that the system with nonzero initial conditions and
different weights is – Nonlinear.
Q2.11 Program P2_3 was modified to simulate the system:
y[n] = x[n]x[n–1]
The output sequences y1[n], y2[n],and y[n]of the above system generated by
running the modified program are shown below:
y 1 [n]
y 2 [n]
y (^) t[n]
Amplitude
Output Due to Weighted Input: a (^) ⋅ x 1 [n] + b (^) ⋅ x 2 [n]
Amplitude
Weighted Output: a (^) ⋅ y 1 [n] + b (^) ⋅ y 2 [n]
Time index n
Amplitude
Difference Signal
Comparing y[n] with yt[n] we conclude that the two sequences are – Not the Same.
This system is – Nonlinear.