


1
Department of
Electrical and Computer Engineering
Yimin Zhang
Department of Electrical & Computer Engineering
Villanova University
ECE8231
Digital Signal Processing
http://www.ece.villanova.edu/~zhang/ECE8231/

















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An in-depth explanation of the z-transform, its properties, region of convergence, and inverse transform. It includes examples of right-sided, left-sided, and two-sided sequences, as well as the relationship between stability, causality, and the region of convergence. The document also covers the inverse z-transform using inspection method and partial fraction expansion.
Typology: Study notes
1 / 41

This page cannot be seen from the preview
Don't miss anything!
Yimin Zhang
Department of Electrical & Computer Engineering
Villanova University
ECE
Digital Signal Processing
The
z
-Transform
In general, we have
Let
z=re
j^ ω
Then, the
z
-transform of a sequence
x
n
] is
defined aswith
z
being a complex variable.
∞ −∞ =
−
n
z
∞ −∞ =
−
−
∞ −∞ =
−
n
n
j
n
n
n
j
j^
ω
ω
ω
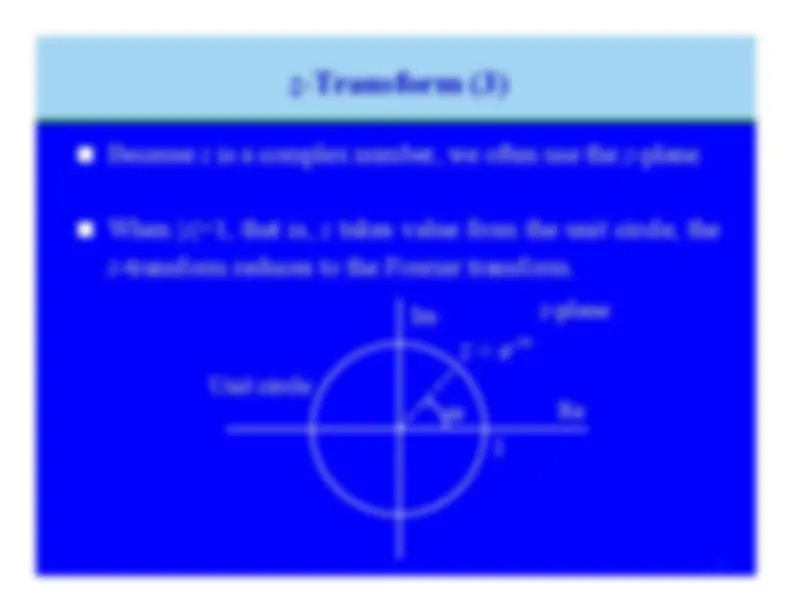
Because
z
is a complex number, we often use the
z
-plane.
When |
z
|=1, that is,
z
takes value from the unit circle, the
z
-transform reduces to the Fourier transform.
Unit circle
Im
Re
1
z
-plane
ω j
ω
Absolute summability of
z
-transform
It is possible for the
z
-transform to converge even if the
Fourier transform does not.
Convergence
depends
only
on
z
The
region
of
convergence (ROC) consists of all values of
z
such that
the last inequality holds.
If the ROC includes the unit circle, the Fourier transformof the sequence converges.
∑
∑
∞
−
∞ −∞ =
−
n
n
n
n
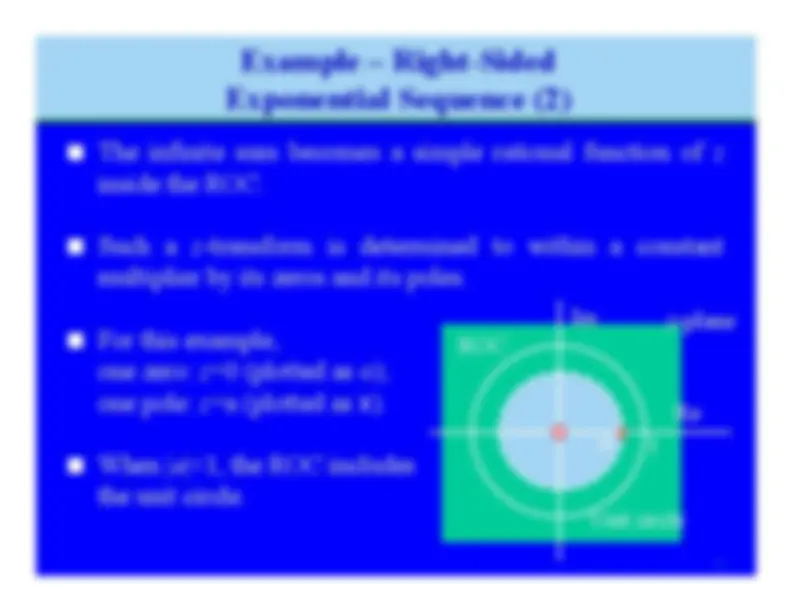
Consider
x
n
a
n
u
n
]. Because it is nonzero only for
n
this is an example of a
right-sided
sequence.
For convergence of
z
), we require
Thus, the ROC is the range of values of
z
for which |
az
or equivalently, |
z
a
|. Inside the ROC, the infinite series
converges to
∑
∑
∞ =
−
∞ −∞ =
−
0
1
n
n
n
n
n
∑
∞ −∞ =
−
n
n
1
−
1
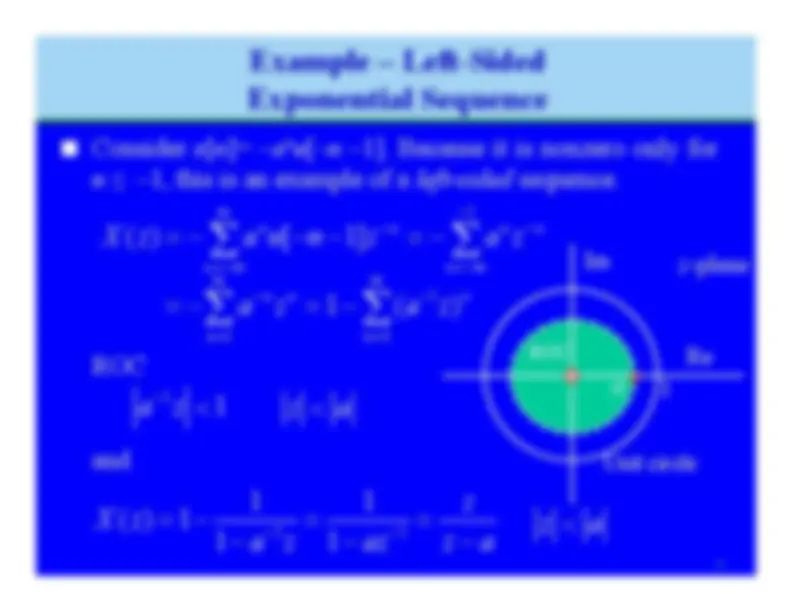
Consider
x
n
a
n
u
n –
1]. Because it is nonzero only for
n
≤
1, this is an example of a
left-sided
sequence.
ROC and
∑
∑
∑
∑
∞ =
−
∞ =
−
−
−
∞
−
0
1
1
1
n
n
n
n
n
n
n
n
n
n
n
1
−
−
−
1
1
Unit circle
Im
Re
1
x
z
-plane
ROC
a
As can be seen from the two examples,
the algebraic
expression
or
pole-zero
pattern
does
not
completely
specify the z-transform of a sequence; i.e., the ROC mustalso be specified.
−
1
−
1
n
−
n
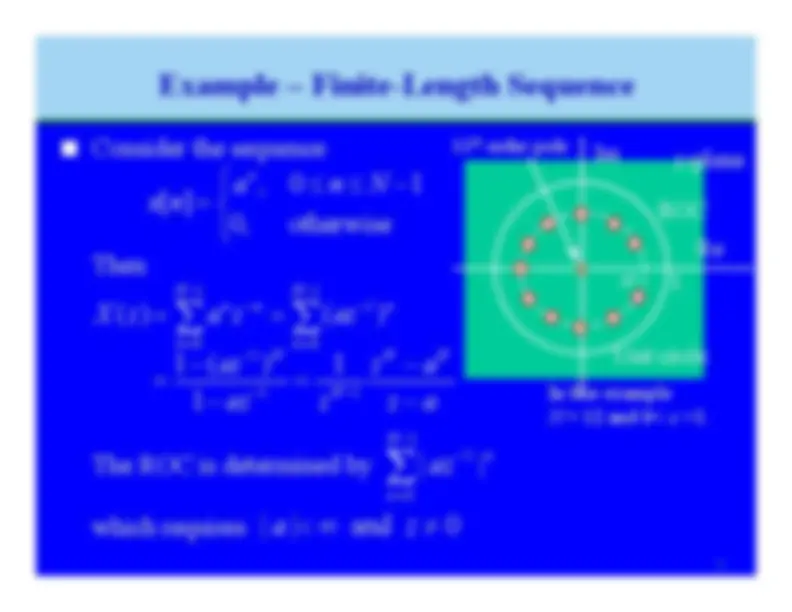
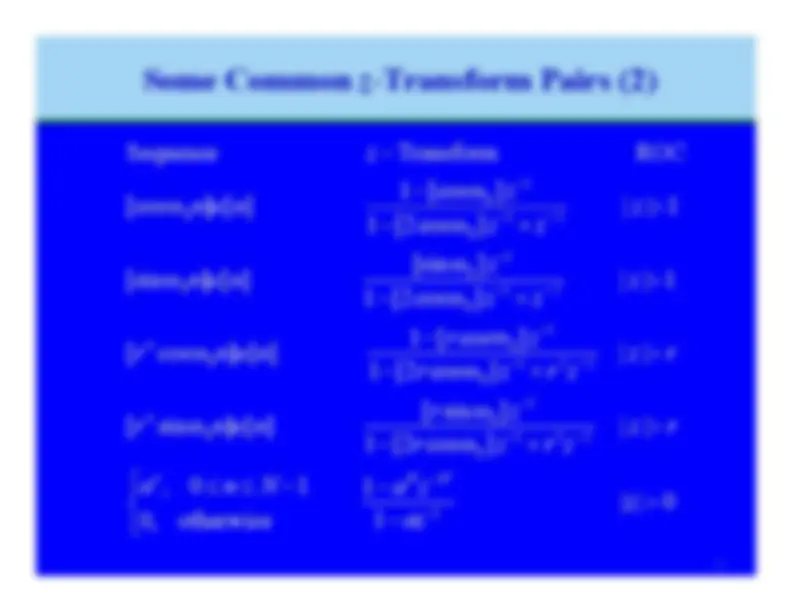
Consider the sequenceThen The ROC is determined bywhich requires
N
N
N
N
N n
n
N n
n
n
−
− −
− =
−
− =
−
∑
∑
1
1 1
(^10)
1
(^10)
n
∑
− =
−
(^10)
1
N n
n
Unit circle
Im
Re
1
x
z
-plane
11
th
order pole
a
ROC
In this example N
= 12 and 0<
a
<1.
(
)
(
)
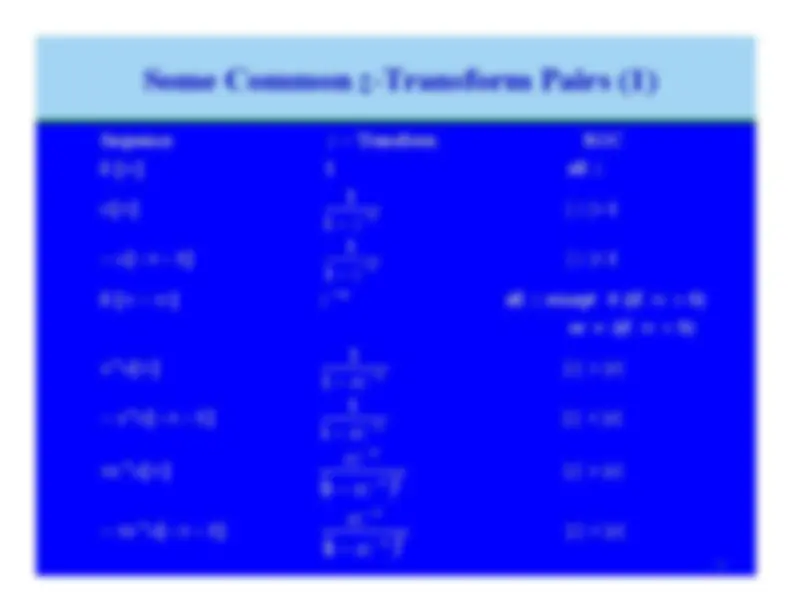
|a|
|z|
az az
n
u
na
|a|
|z|
az az
n
u
na
|a|
|z|
az
n
u
a
|a|
|z|
az
n
u
a
m
m
z
z
m
n
z
z
n
u
z
z
n
u
z
n
z
n
n n
n
m
<
−
−
−
−
>
−
<
−
−
−
−
>
−
<
∞
>
−
<
−
−
−
−
>
− −
− −
− − − −
−
− −
1
] 1
[
1
]
[
1
1
] 1
[
1
1
]
[
(if
or
(if 0
except
all
]
[
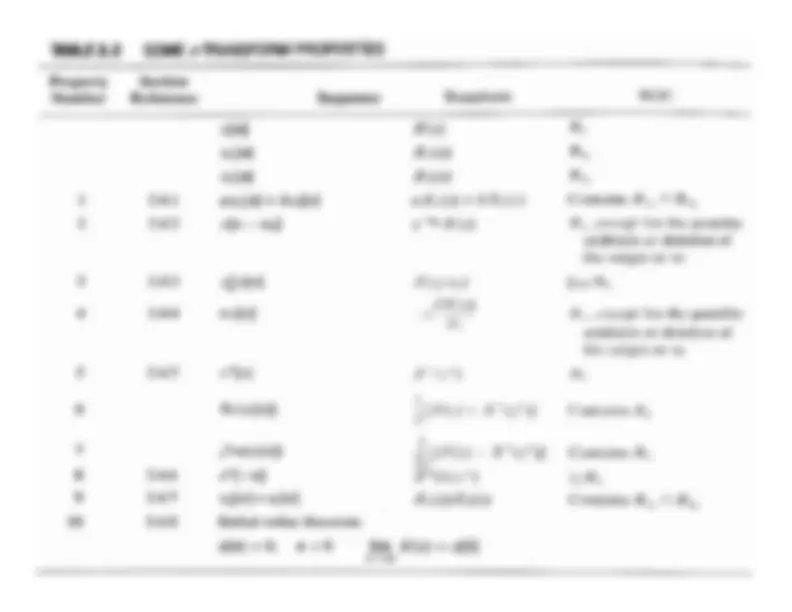
1
|
|
1
1
] 1
[
1
|
|
1
1
]
[
all
1
]
[
ROC
Transform
Sequence
2 1 1
2 1 1
(^11) 1 1
δ δ
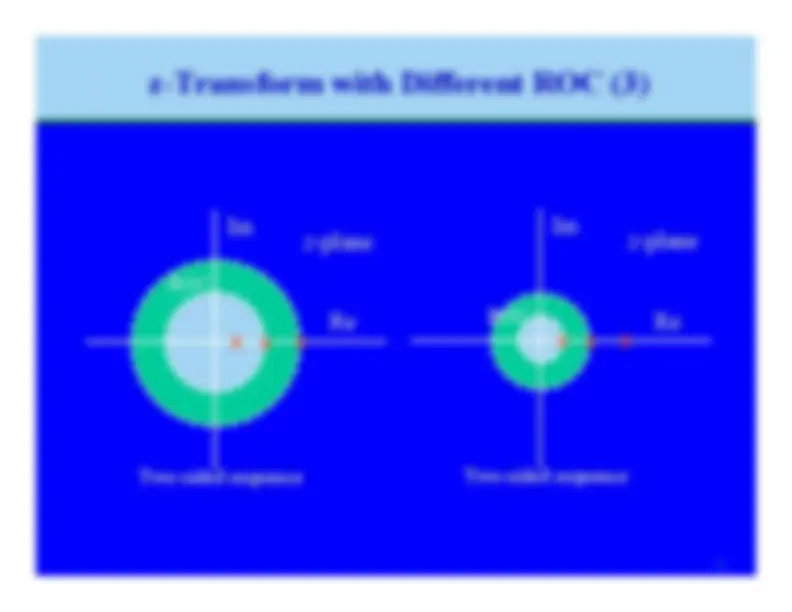
Property 1:
The ROC is a ring or disk in the
z
-plane
centered at the origin; i.e., 0
r
R
z
r
L
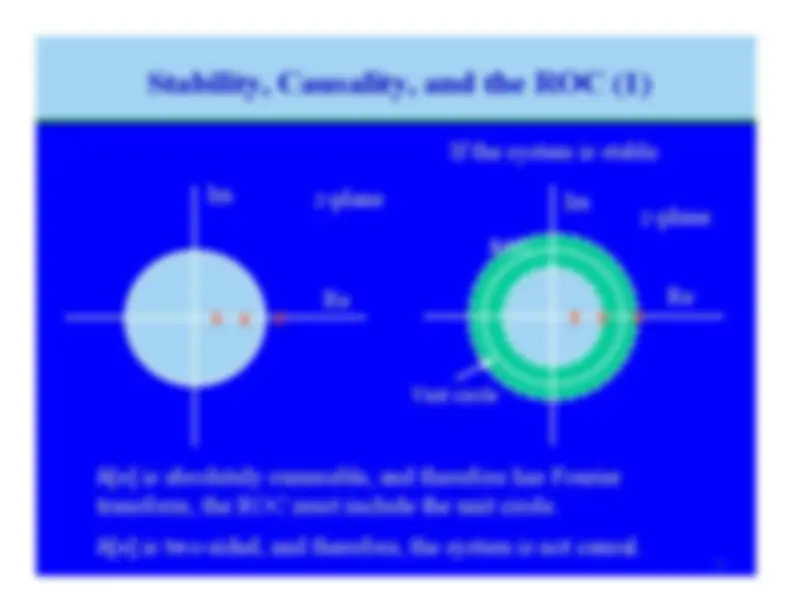
Property 2:
The Fourier transform of
x
n
] converges
absolutely if and only if the ROC of the
z
-transform of
x
n
] includes the unit circle.
Property 3:
The ROC cannot contain any pole.
Property 4:
If
x
n
] is a finite-duration sequence, i.e., a
sequence that is zero except in a finite interval –
1
n
2
, then the ROC is the entire
z
-plane, except
possibly
z
= 0 or
z
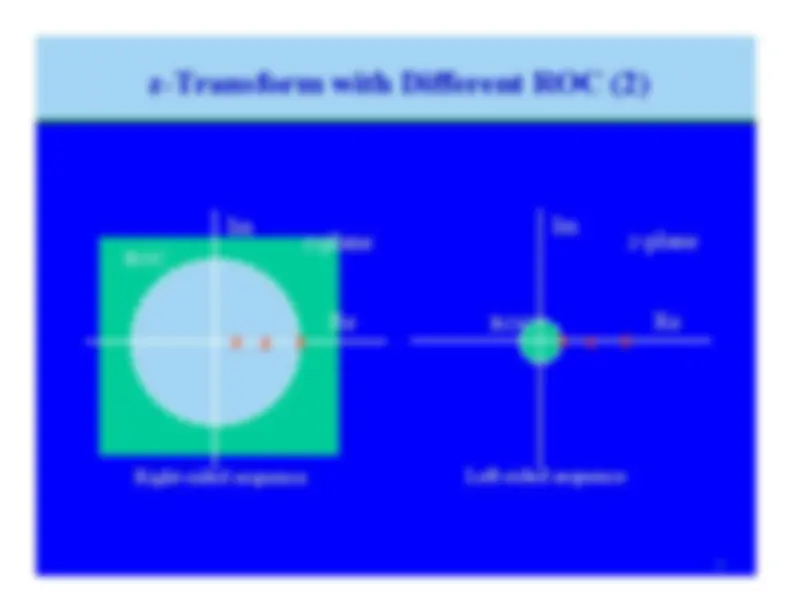
Property 5:
If
x
n
] is a
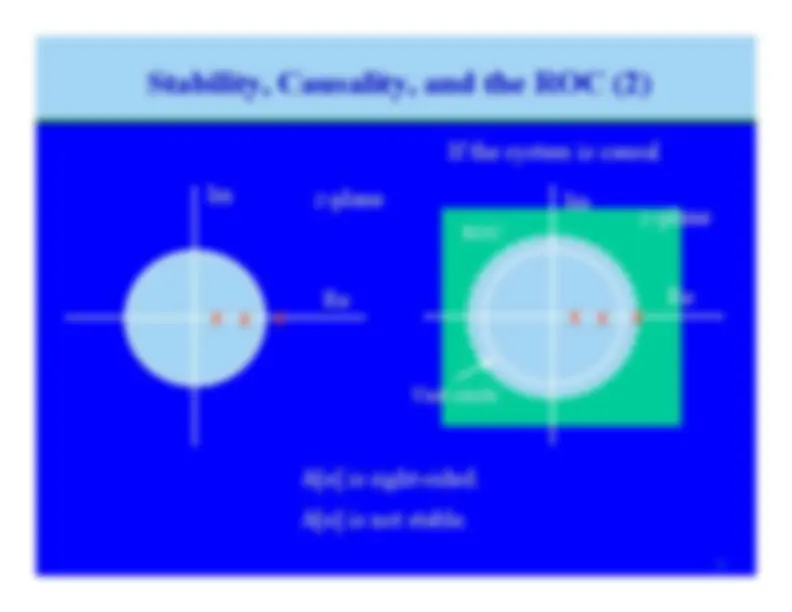
right-sided sequence
, i.e., a
sequence that is zero for
n < N
1
, the ROC extends
outward from the outmost (i.e., largest magnitude) finitepole in
z
) to (and possibly include)
z
Property
If
x
n
is
a
left-sided
sequence
i.e.,
a
sequence that is zero for
n > N
2
, the ROC extends
inward from the innermost (smallest magnitude) nonzeropole in
z
) to (and possibly include)
z
Im
Re
x
z
-plane
Unit circle
x
x
For
a
system
whose
poles
are
shown
in
the
figure,
consider the stability and causality of the system.
Im
Re
x
z
-plane
ROC
x
x
Right-sided sequence
Im
Re
x
z
-plane
ROC
x
x
Left-sided sequence