Download Theorem Derive - Control System Engineering - Exam and more Exams Systems Engineering in PDF only on Docsity!
Cork Institute of Technology
Bachelor of Engineering (Honours) in Mechanical Engineering - Stage 3
Bachelor of Engineering (Honours) in Biomedical Engineering – Stage 3
(EMECH_8_Y3) (EBIOM_8_Y3)
Summer 2008
Control Systems Engineering
(Time: 3 Hours)
Answer any FOUR Questions Examiners: Prof. M. Gilchrist ALL questions carry equal marks. Mr. P. Clarke Dr. M. J. O’Mahony
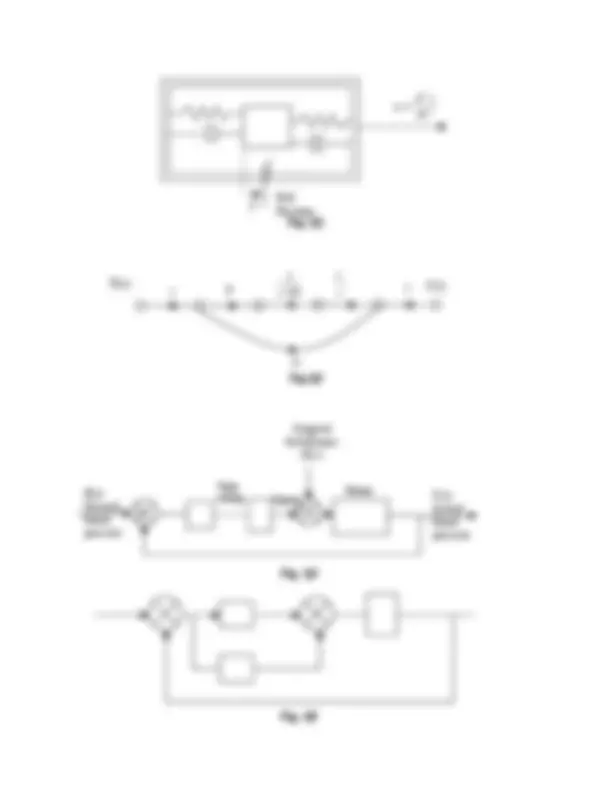
- Fig. Q1 is a diagram of an accelerometer. The accelerometer mass m is suspended by two springs of stiffness k and two dampers with coefficient of damping c. The input
acceleration is (^) a d^ x d t
=
2 2 as shown which results in a displacement of^ y^ of the mass^ m from its at rest position relative to the body of the accelerometer.
Derive the transfer function relating output displacement to input acceleration i.e., Y s A s
(10 Marks)
Hence determine the natural frequency and damping ratio of the accelerometer. (10 Marks)
For an accelerometer mass of 10g determine the spring stiffness k that will give a natural frequency of 100 kHz and the coefficient of damping c to give a damping ratio of 0. (5 Marks)
2 (a) Discuss the various performance criteria used to evaluate the response of a control
system. Most control systems are designed to give an underdamped response; explain and discuss why this is so. (13 Marks)
(b) A closed loop control system is represented by the signal flow graph shown in Fig Q2.
Determine the roots of the characteristic equation and the values of the following parameters:
(a) Damped natural frequency ωd
(b) Damping ratio ξ
(c) Undamped natural frequency ωn.
(d) Peak time t (^) p
(e) Percentage overshoot MP.
Comment on the values obtained (12 Marks)
(a) Using the Final Value Theorem derive an expression for the steady state error signal ess of a negative feedback control system in terms of forward loop transfer function
G(s), the feedback loop transfer function H(s) and the input transfer function R(s). (8 Marks)
(b) Explain what is meant by the Type No. of a control system and discuss its effect on the steady state response of a system to step, ramp and parabolic inputs.
(7 Marks) (c) The system shown in Fig. Q3 controls the mean arterial pressure during anesthesia.
The level of arterial pressure is postulated to be a proxy for depth of anesthesia during surgery. The impact of surgery is represented by the disturbance D(s).
(i) Determine the steady-state error due to a disturbance D(s)=1/s (let R(s)=0). (5 Marks)
(ii) Determine the steady-state error for a ramp input r(t)=t, t>0 (let D(s)=0). (5 Marks)
Fig. Q
Fig Q
Fig. Q
Fig. Q
y
Ref. Position
a
d x dt
2 2
c c
k k
m
C(s) 1 9
s + 6
s^1
R(s)
K^1 s
( s +2)
Valve setting (^) Vapour R(s) Patient Desired blood pressure
C(s) Actual blood pressure
Surgical disturbance D(s)
K P
K (^) d s
Graph Q.2: Percentage overshoot versus Damping ratio for a second order system