Download Transfer Function - Control System Engineering - Exam and more Exams Systems Engineering in PDF only on Docsity!
Cork Institute of Technology
Bachelor of Engineering (Honours) in Mechanical Engineering – Stage 3
(Bachelor of Engineering in Mechanical Engineering – Stage 3)
(NFQ – Level 8)
Autumn 2005
Control Systems Engineering
(Time: 3 Hours)
Answer any FOUR Questions Examiners: Prof. J. Monaghan ALL questions carry equal marks. Mr. J. E. Hegarty Dr. M. J. O’Mahony
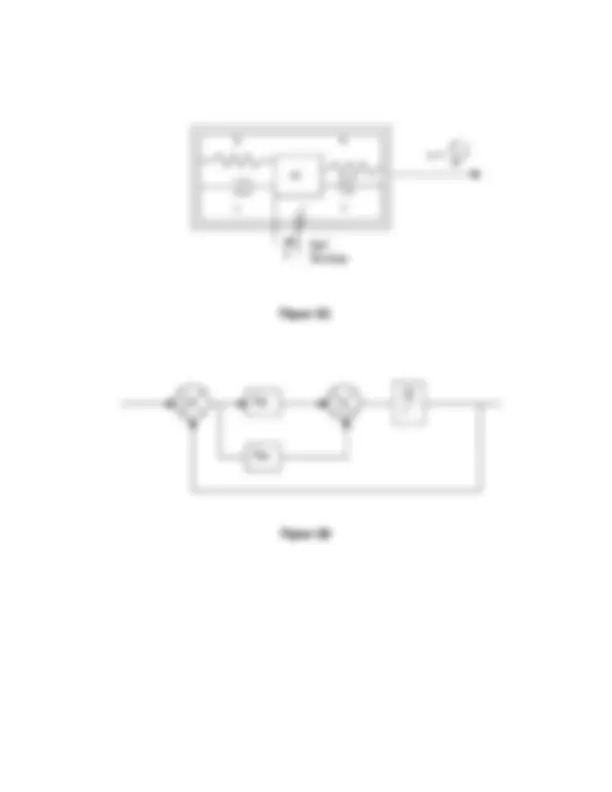
Q1. Figure Q1 is a diagram of an accelerometer. The accelerometer mass m is suspended by two springs of stiffness k and two dampers with coefficient of
damping c. The input acceleration is (^) a d^ x d t
=
2 2 as shown which results in a displacement of y of the mass m from its at rest position relative to the body of the accelerometer Derive the transfer function relating output displacement to
input acceleration i.e.,
Y s A s
15 Marks
Hence determine the natural frequency and damping ratio of the accelerometer. For an accelerometer mass of 10g determine the spring stiffness k that will give a natural frequency of 100 kHz and the coefficient of damping c to give a damping ratio of 0. 10 Marks
Q2. Sketch the root locus of the control system with the following open loop transfer function:
G s H s
K
s s s
Determine the value of K which results in a dominant pair of complex poles with a damping ratio of 0.5. For this value of K evaluate all roots of the characteristic equation.
Q3. (a) The transient response of a control system is determined by the location in the s-plane of the roots of the characteristic equation. Discuss the various root configurations that can occur and illustrate the resulting system response for each case. (10 marks)
(b) What is meant by the dominant root response and under what conditions can it be assumed to occur? (5 marks)
(c) Discuss the conditions necessary for stable behaviour in a control system and determine the stability of the control systems represented by the following characteristic equations:
(i) q s ( ) = s^4 + 2 s^3 + 8 s^2 + 4 s + 3 = 0 (ii) q s ( ) = s^5 + s^4 + 3 s^3 + 9 s^2 + 16 s + 10 = 0 (10 marks)
Q4. (a) Explain what is meant by a steady state error of a control system. Show how it is controlled by the Type No. of the system. Derive the steady state errors for Type 0, Type 1 and Type 2 systems in response to unit step and unit ramp inputs. (15 marks)
(b) A position control system has the following open loop transfer function:
G s H s
K K K
s s
p m pot m
K (^) p = Proportional Gain K (^) m = Motor/Load Constant = 10 rad/s per V K (^) pot = Potentiometer Gain = 2 V per rad τm = Time Constant = = 0.2 s
Determine the value of K (^) p such that the steady state error in response to a unit ramp input will be less than 0.5 deg. (10 marks)
Q5. (a) Discuss the various performance criteria used to evaluate the response of
a control system. Most control systems are designed to give an
underdamped response; explain and discuss why this is so. (13 marks)
Figure Q1.
Figure Q
y
Ref. Position
a
d x dt
2 2
k k
c c
m
K P
K (^) d s
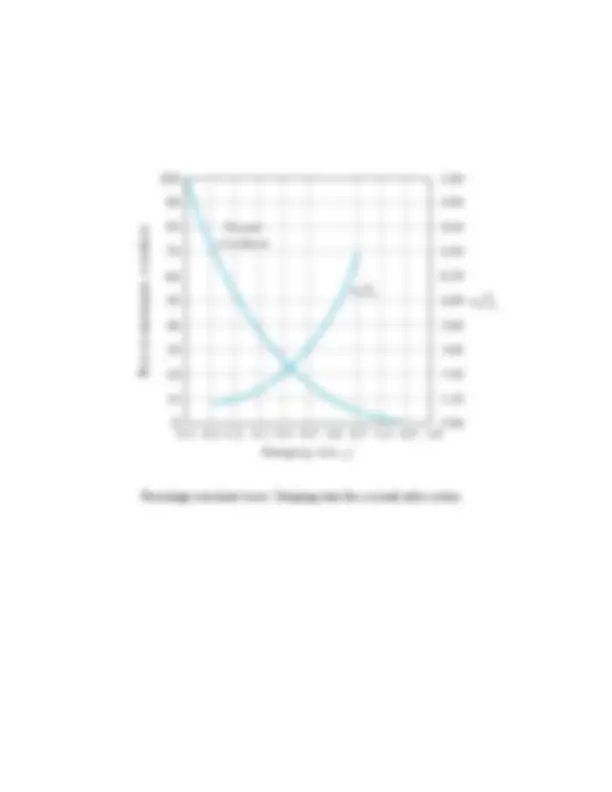
Percentage overshoot versus Damping ratio for a second order system