Download MicroElectroMechanical Systems (MEMS) - Transducers and Actuators and more Study notes Electrical and Electronics Engineering in PDF only on Docsity!
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^1
Wright State University Wright State University
EE480/
Micro-Electro-Mechanical Systems
(MEMS)
Summer 2006
LaVern Starman, Ph.D. Assistant Professor Dept. of Electrical and Computer Engineering Email: [email protected]
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^2
Transducers: Actuators Transducers: Actuators
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^3
OverviewOverview
- Transducers
- Basic Mechanics
- Actuators
- Electrostatic
- Electro-Thermal
- Bimorph Electro-Thermal
- Residual Stress
- Mechanical Components
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^4
Transducers Transducers
- Transducer: a device that transfers power from one form to another
- Transducers can be divided into two categories
- Sensors – reacts to environment
- Actuators – acts on environment
- Can you think of common examples of sensors and actuators?
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^7
Transducers Transducers
Biological Sugars, proteins, hormones, antigens, and etc.
Humidity, pH level and ions, concentration of gases, vapors and odors, toxic and flammable materials, pollutants, and etc.
Chemical
Magnetic field, flux, magnetic moment, magnetization, magnetic permeability, and etc.
Magnetic
Position, displacement, velocity, acceleration, force, torque, pressure, mass, flow, acoustic wavelength and amplitude, and etc.
Mechanical
Gamma rays, X-rays, ultra-violet, visible, infra-red, micro-waves, radio waves, phase, and etc.
Radiation
Thermal Temperature, heat, heat flow, entropy, heat capacity, and etc.
Charge, current, voltage, resistance, conductance, capacitance, inductance, dielectric permittivity, phase, frequency, and etc.
Electrical
Signal Measurands Classification
After Gardner, Microsensors , 1994.
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^8
Transducers Transducers
Biological Provide mechanical actuation, computing, etc.
Change/Provide humidity, pH level and ions, concentration of gases, vapors and odors, muscle stimulation, and etc.
Chemical
Provide magnetic field, flux, magnetic moment, magnetization, magnetic permeability, etc.
Magnetic
Provide displacement, velocity, acceleration, force, torque, pressure, mass, flow, and etc.
Mechanical
Radiation emit light and other radiation
Thermal heat, cool, radiate, and etc.
Electrical Provide charge, current, voltage, and etc.
Signal Action Classification
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^9
Transducers Transducers
- Ideal Sensor Characteristics
- Linear Operation
- Noise Free Response
- Zero Baseline
- Fast Response Time
- Large Frequency Bandwidth
- No Saturation
- High Sensitivity
- High Resolution
- Reliable and Rugged
- No Performance Drift
- Intolerant to Interference
- No Hysteresis, Repeatable
- Low Power Consumption
- Simple Construction
- Ideal Actuator Characteristics
- Aforementioned, plus ….
- High Force Per Unit Volume
- Large Deflections
- Simplicity of Drive and Control
- Simple Interface
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^10
OverviewOverview
- Transducers
- Basic Mechanics
- Actuators
- Electrostatic
- Electro-Thermal
- Bimorph Electro-Thermal
- Residual Stress
- Mechanical Components
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^13
F
K A
V
V
F
K A
V
V
Shear Stress & Strain Cont. Shear Stress & Strain Cont.
E = 2 G (1 + μ) = 3 K (1 − 2 μ)
For isotropic materials (those having identical properties in every direction, generally not the case for most single-crystal materials, Shear modulus, G, is related to the elastic modulus, E, by μ is Poisson’s ratio K is the bulk modulus
The bulk modulus is defined as the ratio of hydrostatic stress to
volume compression
The bulk modulus of a material represents its volume change under uniform pressure. In general, solids are less compressible than liquids due to their rigid atomic lattices Water – K = 2.0 x 10 9 N/m^2 Aluminum – K = 7 x 10^10 N/m^2 Steel – K = 14 x 10^10 N/m^2
For Ex.
hydrostatic stress volume compression in N/m
2
Micromachined Transducers Sourcebook G. Kovacs ©
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^14
Poisson’ Poisson’s Strains Strain
a o
t o
L
L
D
D
axial strain
transverse strain
t o a o
D
D
L
L
Poisson’s ratio ν or μ always defined as a positive value
t o a o
D
D
L
L
transverse strain longitudinal strain
Typical values are 0.2 to 0.5 for most materials For most metals, Poisson’s ratio is ~ 0. Rubber’s have a Poisson’s ratio closer to 0. Cork has a Poisson’s ratio close to 0 (^) Micromachined Transducers Sourcebook G. Kovacs ©
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^15
Actuators: Electrostatic Actuators: Electrostatic
- Advantages
- Simple Designs
- Simple Fabrication
- High Frequency Operation
- Low Power
- Disadvantages
- Low Force Per Unit Volume
- High Drive Voltages
- Nonlinear Operation
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^16
Actuators: Electrostatic Actuators: Electrostatic
- Parallel Plate
- Two plate like structures facing each other, with a potential
difference between them, will be drawn together due to the
force of electrostatic attraction.
L
d
Top Electrode
A
b
a
Flexure
Bottom Electrode
Anchor V
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^19
Actuators: Electrostatic Actuators: Electrostatic
- Notes:
- Displacement vs. Actuation Voltage
- Spring Constants
- Damping Coefficient
- Lumped Element Dynamic Model
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^20
Actuators: Electrostatic Actuators: Electrostatic
Cronos^ Cross section of motor
Pin
Stator Rotor
(^3 3) Cronos Torque Motor
Wobble Motor
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^21
Actuators: Electrostatic Actuators: Electrostatic
Anchor
Folded Spring Suspension Truss
Moveable Comb
Stationary Comb
n = 30
Drive Line
Sense Line Ground
Stationary Comb
Bumper/Limiter
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^22
Actuators: Electrostatic Actuators: Electrostatic
Anchor
Folded Spring Suspension Truss
Moveable Comb
Stationary Comb
Ground
Stationary Comb
Bumper
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^25
Actuators: Electrostatic Actuators: Electrostatic
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^26
Actuators: Electrostatic Actuators: Electrostatic
75 V0-P
150 V0-P
30 V0-P
30 V0-P
V0-P
1/ fDrive
Function Generator & Amplifier
Probe
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^27
Actuators: Electrostatic Actuators: Electrostatic
- When driving with a zero-bias input signal, the frequency of operation is twice the input signal frequency!
Drive Voltage
1/ fDrive +
Actuator Displacement V
1/2 fDrive
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^28
Actuators: Electrostatic Actuators: Electrostatic
- Cantilever
- Simpler Structure
- Modeling Voltage vs. Deflection more
complicated.
K. E. Petersen, “Dynamic Micromechanics on Silicon: Techniques and Devices,” IEEE Transactions on Electron Devices , vol. ED-25, no. 10, 1978.
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^31
Actuators: ElectroActuators: Electro--ThermalThermal
• Advantages
- Simple Designs
- Simple Fabrication
- High Force Per Unit Volume
- Low Voltage
• Disadvantages
- Temperature Dependent
- High Electric Power Consumption
- Low Frequency Operation
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^32
Actuators: ElectroActuators: Electro--ThermalThermal
- Material expands due to Ohmic or Joule Heating causing motion of
actuator structure.
L
t
t
A
T(0) = T 1 T(L) = T^2
0 x
I
+ V -
2
q
x
T
k &
T T x T
L
Lx x
k
q
T x = − + − +
Heat Transfer
( ) =∫ [ + ( ( )− )]
x
Lnew x T T d
0
Thermal Expansion
q &
L
V A
R
V
A
IL
q I R
2 2 2
=Power =^2 = -or- =
2
2 2
2
Volume
Power
L
V
A
I
q & = =
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^33
Actuators: ElectroActuators: Electro--ThermalThermal
- Laterally/Horizontally Deflecting
- Motion that is parallel to the plane of the substrate
d
h Lc Lf Lh Electrically Insulated Substrate
Wc
Wh g
anchors
cold arm hot arm
direction of actuation
polysilicon
Wf
200 μm
Example properties needed for modeling an electro- thermal actuator: ρ = electrical resistivity = 2.3 × 10 -5^ Ωm α = coefficient of thermal expansion = 29 × 10 -7^ K- αr = temperature coefficient of resistance = 1.25 × 10 -3^ K- k = thermal conductivity = 32 W/mK E = Young’s modulus = 169 GPa ν = Poisson’s ratio = 0. Comtois et al., 1995 (^) Optimum Dimensions:
- g = as small as possible
- h = as tall as possible
- Wc/Wh = 7
- Wh = as small as possible
- L (^) f ≈ L (^) h/
- Increasing the temp. difference between the cold and hot arm increases deflection.
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^34
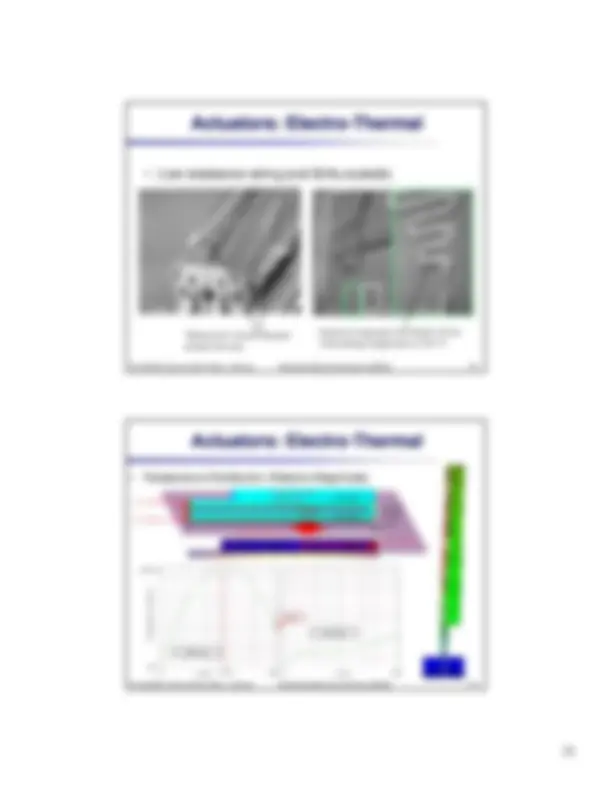
Actuators: ElectroActuators: Electro--ThermalThermal
- Laterally (Horizontally) Deflecting 35 μm 200 μm
μ
m
V. Bright et al., AFIT, 1996
Comtois et al., 1995
Lh = 200 μm Wh = Wf = g = 2 μm Lf = 35 μm Wc = 14 μm R = 1558 Ω Force ≈ 20 μN
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^37
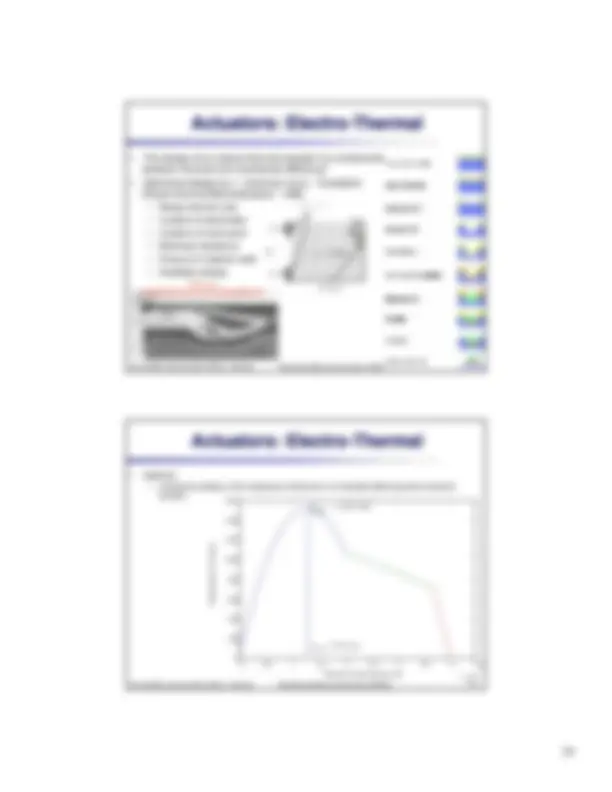
Actuators: ElectroActuators: Electro--ThermalThermal
Yoke Dimple Tab Actuator Wiring
R. Reid, AFIT, 1996
R. Reid, AFIT
AFIT
AFIT
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^38
Actuators: ElectroActuators: Electro--ThermalThermal
R. Reid, AFIT, 1996
V. Bright, AFIT
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^39
D. Burns et al., AFIT
252 μm
Actuators: ElectroActuators: Electro--ThermalThermal
dimple
current path cold arm
flexure
outer hot arm
anchor
substrate contact
inner hot arm anchor
Design measurements for thermal actuators
Comparison of single hot-arm (1-H) and double hot-arm (2-H) actuator operating properties
direction of movement
EE 480/680, Summer 2006, WSU, L. Starman MicroElectroMechanical Systems (MEMS)^40
Actuators: ElectroActuators: Electro--ThermalThermal
D. Burns et al., AFIT