



Computer Graphics
Introduction to Transforms, 2D
transforms
Docsity.com








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An introduction to transformations in computer graphics, focusing on 2d transformations such as translation, scaling, shearing, and rotation. How transformations change the position, size, orientation, and shape of objects, and how they can be represented using matrices and vector multiplications. It also covers the concept of homogeneous coordinates and the use of translation and scaling matrices. Students will gain a solid foundation in understanding how transformations are applied to objects in computer graphics.
Typology: Slides
1 / 19

This page cannot be seen from the preview
Don't miss anything!
Computer GraphicsIntroduction to Transforms, 2D transforms
n Transformation changes an objects: n Position (translation) n n Size (scaling)Orientation (rotation) n Shapes (shear) n We will introduce first in 2D or (x,y) , build intuition n Later, talk about 3D and 4D? n Transform object by applying sequence of matrixmultiplications to object vertices
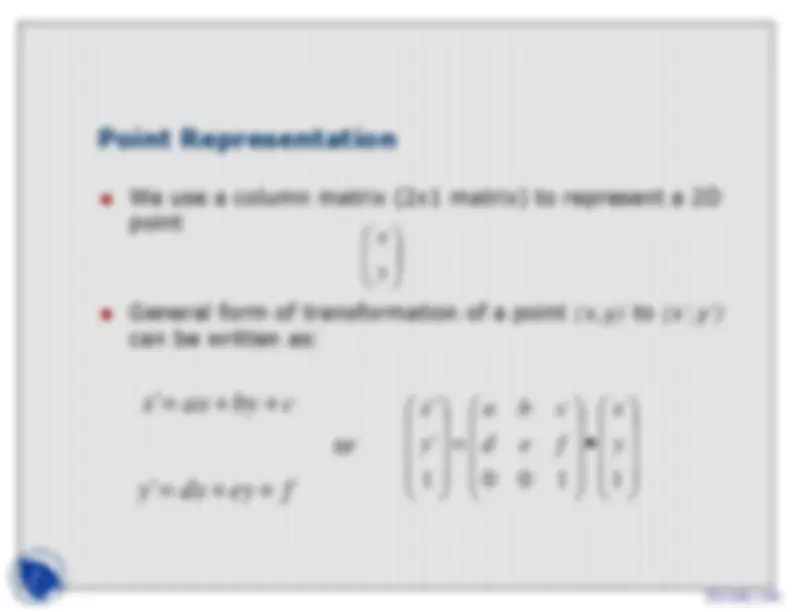
n We use a column matrix (2x1 matrix) to represent a 2Dpoint
n General form of transformation of a point can be written as: (x,y) to (x’,y’)
yx
x '= ax + by + c y '= dx + ey + f
n To reposition a point along a straight line n Given point (x,y) and translation distance (tx, ty) n The new point: (x’,y’) x’=x + tx y’=y + ty (x,y)
(x’,y’) or
ßHow to translate an object with multiple vertices?
Translate individualvertices
ßScale: Alter object size by scaling factor (sx, sy). i.e
(1,1)
(2,2) Sx = 2, Sy = 2 (2,2)
(4,4)
yx '' = Sx 0 Sy^0 yx
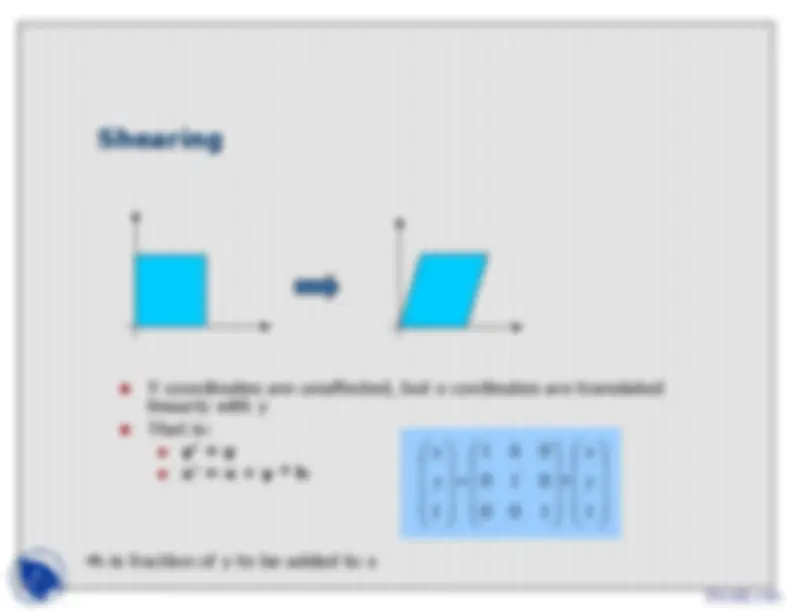
n Y coordinates are unaffected, but x cordinates are translatedlinearly with y n That is: n y’ = y n x’ = x + y * h
∗
=
0 0 1 1
0 1 0 1 0 1
y h x y x
ßh is fraction of y to be added to x
ßDefault rotation center is origin (0,0)
θ θ> 0 :^ Rotate counter clockwise
θ^ θ< 0 :^ Rotate clockwise
(x,y)
(x’,y’) θ
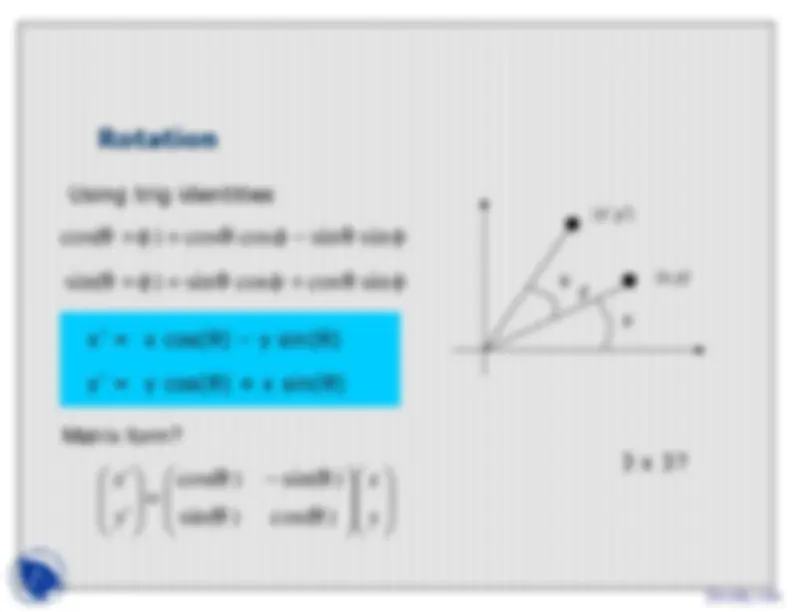
Matrix form? 3 x 3?
Using trig identities
(x,y)
(x’,y’) θ
= ^ − y
x y
x sin( ) cos( )
cos( ) sin( ) '
' θ θ
θ θ
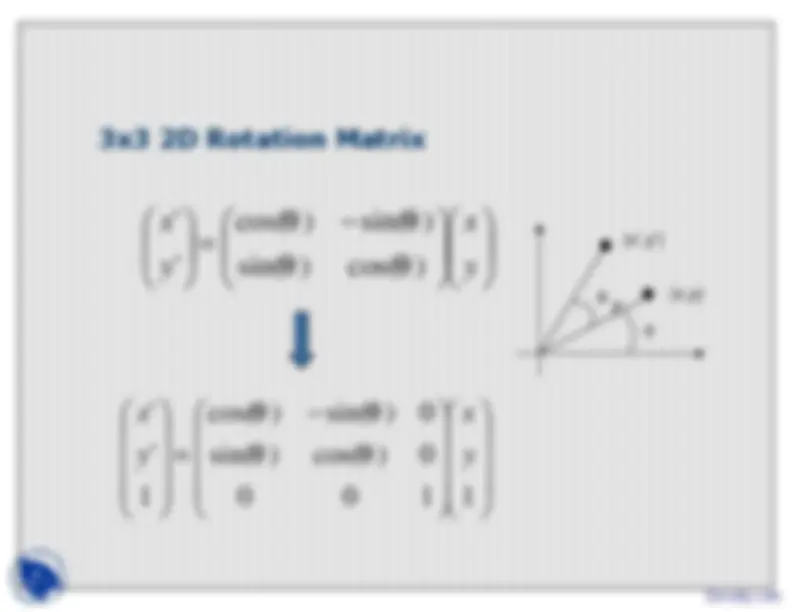
0 0 1 1
sin( ) cos( ) 0
cos( ) sin( ) 0 1
'
' y
x y
x θ θ
θ θ
n To rotate about arbitrary point P = (Px, Py) by n Translate object by T(-Px, -Py) so that P coincides with origin θ : n n Rotate the object by R(Translate object back: T(Px, Py)θ) n In matrix form: T(Px,Py) R(θ) T(-Px,-Py) * P
sin( ) cos( ) 0
cos( ) sin( ) 0 0 0 1
y
x Py
Px Py
Px y
x θ θ
θ θ
ßSimilar for arbitrary scaling anchor,
n Composing transformation – applying several transformsin succession to form one overall transformation n Example: M1 X M2 X M3 X P where M1, M2, M3 are transform matrices applied to P n Be careful with the order n For example: n Translate by (5,0) then rotate 60 degrees is NOT same as n Rotate by 60 degrees then translate by (5,0)
n Hill, chapter 5.