


Introduction to
Computer Graphics
Farhana Bandukwala, PhD
Lecture 9: Objects and
Transformations in 3D





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A lecture note from dr. Farhana bandukwala's introduction to computer graphics course, focusing on geometric objects and transformations in 3d. Topics include curves, surfaces, volumetric objects, coordinate systems, and matrix representations of transformations such as translation, scaling, and rotations. The document also covers composite transformations and changing coordinate systems.
Typology: Study notes
1 / 10

This page cannot be seen from the preview
Don't miss anything!
(Angel, chapter 4.1)
(Angel, chapter 4.3)
-^ Points in 3-d w/respect to 3 linearly independent vectors(basis or coordinate system)•^ Frame: coordinate system and defined origin
a (^2) e (^1) e
(^3) e
dx 0 1 0
d^ y 0 0 1
d^ z 0 0 0
Translation
s^0 0 x^
0 s^0 y^
0 0 sz
Scaling
z P x^
y P
z x P y^ x
z P y^ x
z
y P
-px 0 1 0
-p^ y 0 0 1
-p^ z 0 0 0
Translation T(-P) =
0 cosT^
-sinT^0 0 sinT^
cosT^0 0 0
Rotation around xR(T) =
px 0 1 0
p^ y 0 0 1
p^ z 0 0 0
TranslationT(P)=
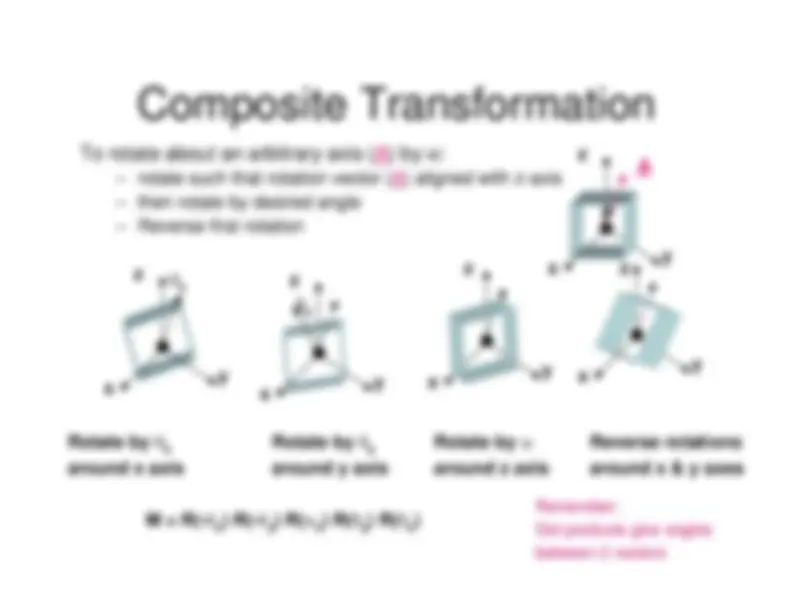
-^ rotate such that rotation vector (
A) aligned with z-axis
-^ then rotate by desired angle–^ Reverse first rotation^ M = R(-
T) R(-T) R(x^ y
D) R(T) R(zy
T)x
x^
y z
z x Tx y
z x A P y
z x
y Ty
x^
y z
Rotate by
Tx around x axis
Rotate by
Ty around y axis
Rotate by
around z axis
Reverse rotationsaround x & y axes Remember:Dot products give anglesbetween 2 vectors
3
3
3
(^2) e (^1) e
(^3) e (^2) v^1 v
(^3) v
Suppose b
is the vector coincident with a
but with respect to the 2
a^ same as nd^ basis
b
(^1) v^ = (^2) v (^3) v -1^ a = Vb
v^ v^11
v^13 vv^21
v^23 vv^31
e v 33 (^12) e (^3) e