



EXAMPLES OF
PRACTICAL
ALGORITHMS
FOR PATH
PLANNING
docsity.com















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Course title is Embedded Intelligent Robotics. This course is for Electrical engineering students. Though good thing is everyone can learn about robotics in this course. This lecture includes: Bug Algorithms, Noncontact Sensors, Probabilistic Roadmaps, Preprocessing Phase, Roadmap Construction, Roadmap Expansion, Expansion Step, Local Planner
Typology: Slides
1 / 28

This page cannot be seen from the preview
Don't miss anything!
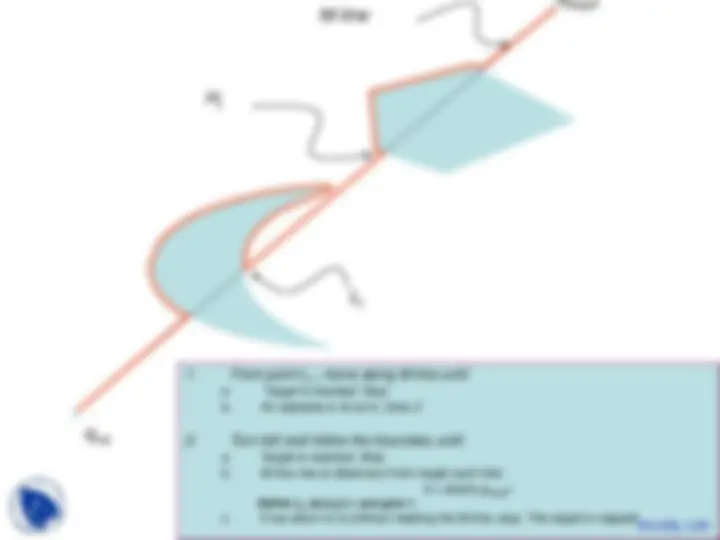
Bug Algorithms
qinit qtarget M-line Lj Hj New leave point condition: d<d(Hj,Target)
qinit qtarget M-line Lj Hj New leave point condition: d<d(Hj,Target)
1. From point Lj- 1 move along M-line until: a. Target is reached. Stop _b. An obstacle is hit at Hj. Goto 2
Probabilistic Roadmaps
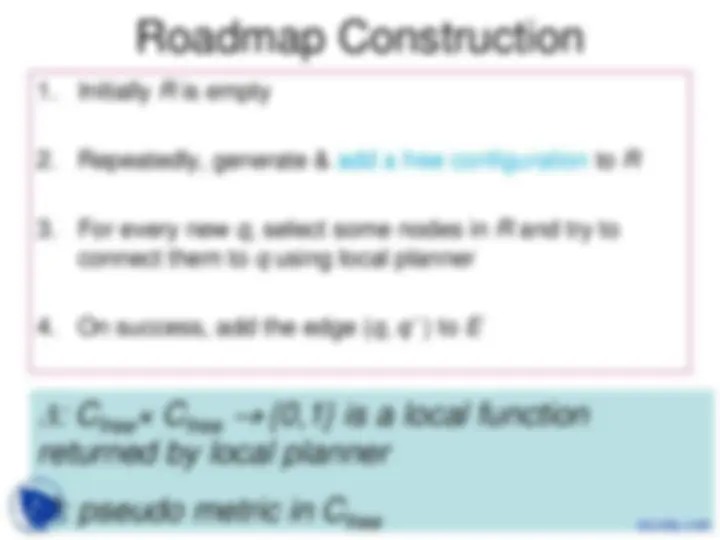
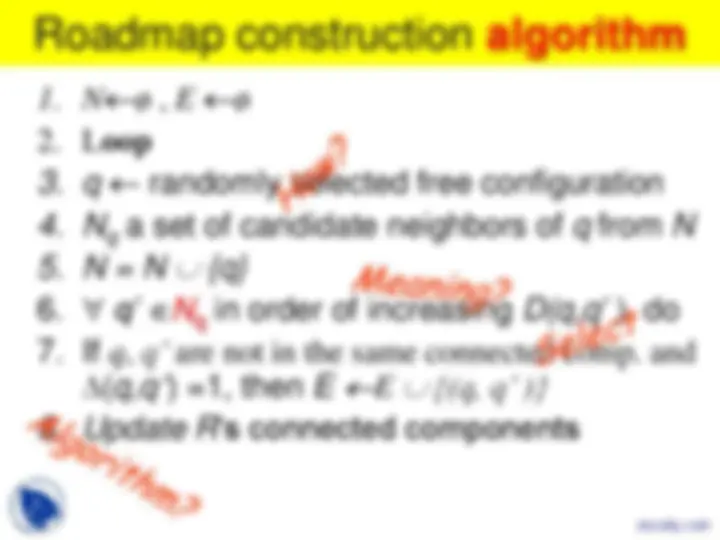
Description of Probabilistic Roadmap Algorithm
2. N : (nodes) set of selected configurations in C _free
Three stages
a) Obtain reasonable connected graph b) Be sure “difficult regions contain a few nodes
Improve graph connectivity by selecting nodes of R which lie in (heuristic) difficult regions and adding nodes there
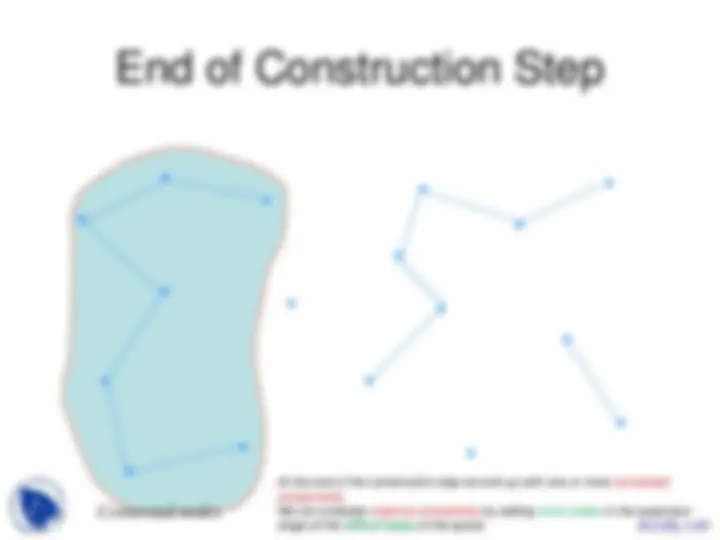
AS a first step we create random configurations in the space. The algorithm creates the points one at a time, but we’re not going to do that with the slides. As configurations are created we try to connect to already existing nodes in the graph (if they are close enough they will get connected)
As edges are added to the graph we start forming connected regions.
The nodes are added and will be connected again using the local planner on the closest nodes.
At the end of the expansion step we end up with the same number, or fewer connected components. docsity.com