Download Analysis of Radar Filter Performance in Polar and Cartesian Coordinates and more Exercises Geometry in PDF only on Docsity!
AD-759 011
DESCRIPTION OF AN ALPHA-BETA FILTER IN
CARTESIAN COORDINATES
Ben H. Cantrell
Naval Research Laboratory
Washington, D.C.
21 March 1973
Sr
IIII II
WSTRIBJTED BY:
Nab" 1ulc (^) hl0i Smk U.S.EPTET OF CIUNN=C (^525) pot POO TU aBon iT g V. (^) 151
NRL Report 7548
Descri ion of an a - Filter
in Cartesian Coordinates
BEN H. CANTRELL
RadarAnalysis Staff Radar Division
March 21, `
NATIONAL TECHNICAL IN
INFOR.NATION (^) EERVICE I
-- O-
o-
Approlon ...d ... v ...r ic : %fisnaieo uam
- ~ ' ... ---. ~ _ ___ ,i-I__
.4. (^) KCY "OROS WRS LINK A LINK 8 LINK c ROL. WT P101 WT •OL w
j c-P tcker
Track-while-scan-radar
!I
I
DDI ,
(I i
mmnmlum&mLr- DD j 7 (AI)__ (^) _____ _ _ _
(PANe 2
CONTENTS
Abstract ............................................. ii
Authorization ...... ................................. ii
1.0 INTRODUCTION ................................. (^) 1
2.0 THE NOISE PROCESS ............................. 1
2.1 Polar-to-Cartesian Coordinate Transformation ........ I 2.2 Effect of Linear Filter .......................... 5 2.3 Cartesian-to-Polar Coordinate Transformation ........ 7 2.4 Discussion of Results ........................... 9
3.0 FILTER DESCRIPTION ............................ 9
3.1 Filter Definition ................................ 1 3.2 Frequency Response ........................... 11 3.3 Errors Under Sinusoidal Excitation ................ 13 3.4 Comparison of Mean Errors for Cartesian and Polar Coordinate Filters ........................... 14 3.5 Discussion of Results ......................... 17
4.0 RESPONSE TO NOISE ............................. 17
4.1 Covariance Equations .......................... 18 4.2 A Simple Stationary Solution .................... 21 4.3 Some Nonstationary Solutions ................... 24 4.4 Discussion of Results ........................... 28
5.0 COMPARISON OF POLAR AND CARTESIAN a•-3 FILTERS FOR SHORT FADE CONDITIONS AND THE TRACK H.ANDOFF PROBLEM ............ 28
5.1 Mean Errors .................................. 32 5.2 Covariance Description ......................... 36 5.3 Track Handoff Problem ......................... 40 5.4 Discussion of Re ults ........................... 42
6.0 CONCLUSION .................................... 42
ACKNOWLEDGMENT ................................. 43
REFERENCES ....................................... 43
APPENDIX - Calculation of Means and Covanances of Radar Measurements in Terms of Cartesian Coordinates.. 44
A_
DESCRIPTION OF AN a-• FILTER IN CARTESIAN COORDINATES
1.0 INTRODUCTION
In the last several years, there has been a considerable amount of interest (^) in auto- matic detection and track-ing for search radar systems. Several systems exist with vwving degrees of automation such as MTDS, NTDS, and (^) the SPS-43. Others are being proposed such as the Gillfillan and APL systems for (^) the SPS-48, the JPTDS program for the SPS-49, and the AEGIS system. Even with these efforts there is still a need to improve system performance under various conditions.
NRL Report 7434 recently studied the effects of maneuvering targets, measurement noise, false targets, and fade conditions on the ability of an ot-0 filter operating in polar coordinates to maintain a track (1). Even mrre recently NRL Report 7505 discussed (^) the ability of this polar coordinate (^) filter to hand off its track from the search radar to the track radar (2). In both of these reports a considerable amount of difficulty was en- countered in either maintaining or handing off (^) a track at close ranges when a polar co- ordina':_2 filte: was used. This was due to large range and azimuth accelerations at the close ranges. In the cartesima coordinate system these large accelerations are (^) not en- cvuntered., (^) However, th- nonlinear tr a,,ormations encountered between the two coor- dinates change the noise processes. it is the purpose (^) of this report to describe analytically the a-9 filter operating in cartesian coordinates and compare these results with the results of the polar (^) coordinate filter.
Section 2.0 describes the probability densities under the coordinate system transfor- mations. (^) Section 3.0 describes the gene-al characterixs ic of the filter and the mean errors between the predicted and true target's positions. Section 4.0 describes the covari- ances at the output of the filter system. Section 5.0 studies the mean and covariance errors (^) under fading conditions and presents the results of a simulation calculating the probability of placing tne bpxm of the tracking radar on a target using the track set up by the a-0 filter. Conclusions (^) are given in Section 6.0.
2.0 THE NOISE PROCESS
In the study of zny filter it is essential to know the (^) charactpniistica of the desired signals and the noise which excite the filter. The mean motion of the targets is studied in Section 3.0. The (^) description of the noise processes proceeds as followsc
The block diagram of the filtering system is shown n Mig. 2.1. The polar coordinate radar measurements are Rm in range and Or in azimuth, where Rm and^0 m are assumed to be uncorrelated, Gaussian., amplitude-distributed random variables with means O,,, Am 11
!/
2 BRN H. CANTRELL
TRANSFORM TRANSFORM x.A co, (^) X. RP
X. R.^ Cos^0 * IERR Y, R, Sin 8.. TILEn'/
Fig. 2.1--Filter system
%ind variances Ohm, 06M In addition, the mneasurements are assumed to be independent from scan to scan of the search radar. ThiL section is concerned with determining ap- proximate probability densities p(Xrn, Ym), piXp, Yp), and p(Rp, p).
2.1 Polar to Cartesian Coordinate Transformation
The probability density of the polar coordinate iadar measurement is
1 F( _ - 0,
p(RmO^1 - p 1IRmRm) 2 + (0m LL
P( 'O)- 2 WtORm O L 2 L mR.. 21
Contours describing constant values of the probability density function are plouted for two different cases in Figs. 2.2 and 2.3. Observing the central (10-8) regions of these densities, one finds that this region appears to be a correlated Gaussian process in the (Xm, Ym) coordinates. ThiF observation is next investigated.
SA cartesian coordinate system (,q) is defined asshown in Fg.2.2 and 2.3. For
an arbitrary point (Rm, Ome)in polar coordinates, the values of p and q in the p-q rectan- gular coordinate system are found to be
p Rm[2 - cos (Omre j-m (2.2)
q = Rm sin (O. -m) (2.3)
wituh the aid of Fig. 2.4. For cases when (Om - Y, ) is less than about 50, Eqs. (2.2) and (2.3) can be approximated by
p P = Rr-m (2.4)
q = Rm(Om - 4n.) (2-5)
with very little error. For exam-ple, if o,. = 0.5 degrees, one would be at 10 ae. or in the far tail region before the approximation beg-i'is to be significantly in error. Furfher- more, if R,, does not significantly deviate from Rm, one c-n further approximate Eq. (2,5) as
M. "M)- (2.6)
4 BEN H. CANTUELL aO@(msinI(C,-fr)/2)
'Rm, 66ý ARBITRARY (^) .POINT N POLAR COORDINWATES
•-p R,.12-c-s'°6,nm- j P)-9,
z "
q Rsn 8 -W.
S~Fig. 2.4--Geometry requzirs~i to compute p and q
in termrA of polai coordinates
SFor example, if qRmtR,, " 0.01 as would be the case for Rm =4.18 nani. and oRm of
ft, one would be in error S250by 1% at one standard deviation and 5%/ at five standard
.•deviations. At longe mriges th~e errr is much less.
_•.. Equations (2.A) and (2.6) are linear transformations and therefore p and q are
Gaussin distributed, at least toS• the extent in which the approximations are valid. By
rotating :he (p, q) coordinates and shifting the mean, one obtains the (X-. ,, -•_ ,coordinates
SXm - Xm =p cos Om - q sin 0., (2.7)
Ym - fm p^ •in^ -Om +^ q^ cos^ -(2.8)
2 fAgain, oleese inea ormayio%at ond therefore thde variables (X5, Ya iare Gan a aus n ie (^) en (^) iibutdd:
NIRL REPORT 7548 5
P(xML (^) Ym)) 2 mV a rrs Ym (Ym=m (^) -
"(X X ( - 2
x{ (^) in1- (^) PXmYm (^) -Y p(2.9)
where
Xm2 R 2 2 + \2i ( i2 6M) sn Rpg (^) (2.11) +(2nO-)COS2ými
[B M in 0(M~)21i2 (2.12)
Pxmym -20 m (2.12)
[n (^) = Rim Cos k." (2.13)
"Ym = Rm sin Om. (2.14)
An independe-nt procedure (^) for obtaining Eqs. (2.10) through (2.14) is also shown (^) in the appendix.
The two density functions (^) ",sed in plotting Figs. 2.2 and 2.3 are approyimated (^) by p(Xm, Ym) shown in Eq. (2.9), and -.he results are shown in Figs. 2.5 and 2.6. In comparing Fig. 2.2 with 2.5 and 2.3 with (^) 2.6, one finds that the central (^) and near tail regions of the two densities p(Xm, Yi) and (^) p(Rin, Om) are essentially the same. The apW proximation begins to break down in the far tail regions. (^) However, it is the central and near tail regions which control (^) the system. An., point in the far tail usually results in saturation or in this case no target being accepted.
2.2 Effect of Linear Filter
Since p(Xm, Ym) is essentially (^) Gaussian, the output of a linear filter is also Gaussian distributed; i.e.,
NRL REPORT 7548 7
p(Xp, 1) Y1 =
21T Up p/.
(xP p)2xp^ -^ Xp)(YP- Yp)^ (Yp^ -^ 7p)
IXpý (^) Yp-xp0v Sxexp L (2.15)
This (^) is because the output of any filter can be written as a linear ctmbination of the inputs, and, since the sum of Gaussian random variables (^) is Gaussian distributed, the out- put of the filter is Gauwsian. The means and co-v-riances will be investigated in detail later.
2.3 Cartesian tc Polar Coordinate Transformation
Contours describing constant (^) values of the probability density function given in Eq. (2.15) are plotted for two different cases in Figs. 2.7 and 2.8. Observing these figures, it appears that the central and near tail regions of these densities are Gaussian distr.buted in polar coordinates. This conjecture is investigated. The (p, q) axis system is defined (^) in Figs. 2.7 and 2.8. The (X, - Xp), (Yp (^) - -) axis is rotated so as to coincide with the p-q axis. Then,
4' -
it
Xp 3536 YP: 3 556A
_ y':016Z.
'
SpVX,, Y,) 3
2- p(Xp V 5xI10 ap(X.~~ p('(P. YPj) 8x^ t'o
I
2o/R
.V
i ~Fig. 2.7--Constant contours of p (Xp, Yp)
-I II•
(^8) iI BEN H. CANTRELL
q P
iU ia
5-
I~~ ýp= 3536 ;?P = 3.
oMs (^) (-oP-V
, I
4 55
yxp
i (^8) t 5 CIO , op(
i i-
fined(2.4 (^) andS i) (2.5Eq ar vaid
•O01T (^) (^2) 3 4 5
XV
SFig. 2.8--Constano p (Xp, Yp)
( p)P cos Op.^ (Yp-^ p)^ sin^ (2.16) ]q (^) =-(Xp - X•p) sin + (Yp - Yp) cos (^) ýp. (2.317)
i For (^) small angular and range deviations in the coordinates (Op, (^) Bp), the approximations de- fined in Eq. (2.4) and (2.5) are valid:
SRp- Rp =p ('118)
R -(Op-'p) -. q. (2.19)
GCmbining Fq,. (2.16)-(2.19), one obtaius
XRp X. cos Dp + Yp .M (2.20)
(-Xp sin + j •cos p)/Ik. (2.21)
Since Eqs. (2.20) and (2.21) are linear transformations on (^) Gaussian-fhiswibuted random variables (^) Xp and Yp, p(Rp, Op) is Gaussian distributp at least over the region in which the approximation is valid:
IL
I10 (^) BEIN H. CANTRELL
(^5) F
V,: 3 536
0 1~=O^ 6 2
2 - (^) (^1) -
0 1 J
Fig. (^) 2.9-Constant contours (^) of p (Rp. Op)
51-
41-p
X =3 536
c0 (^88) (x -RP)
2P(Rr (^) 1 OPh 510
0 IR a I-
(^02 3) (^4) 5
Fig. 2.10-Constant contours of P(Rp, Op)
NRL REPORT 7548
SS 3.1 Filter Definition
The filter in the x coordinate (^) is described by
,•.^ ILX(k) It,.^ I (~I -PITm -a^ (I(1-9)^ -^ o)^ T^ [~k L. Vxj^ -1J_ - 1)j^ L07^1 0-^ **[X_**^ )(3)
IX(k) •-• (^) [Xp(k+jpnj [x(k +iV (^) = [1 [(k)] iT/V] L J , for j =1, ... m. (3.2)
Similarly, the description in the v coordinate (^) is
Y F(I -,a) (I- a)Ti Y(k-1) ja -- + Y,.(k)] (3.3) LVY(ki L-f-IT (1--) LVy,,(k-l)j (^) jI/Tj
S• Fr(k)l
[Yp(k+jlm)] = [1 jT/mtl tor j= (^) 1 ... m. (3.4) :V"(k)
Since the equations are (^) identical in each of the coordinates, it is sufficient to show a few of the characteristics in the x coordinate.
3.2 Frecpaency (^) Response
Using z-transform analysis, we define the transfer functions (3) as
1 xzOz^ z^ +^ ,efo
GX z)^^2 (3.5)_____ =X(z--- (^) z 2 - z(2- a- ) + (1- ()
V=(z) (PIT)z (z - 1) Xm(z) = z2 z(2-a- P) + (I-a) (
and for j = m we can define the transfer (^) function
Xp(z) + ) Gp=Xm(z)( (^) z 2 - z(2-a-fP) + c1-a) (3.7)
By placing (^) z = ejT into Eqs. (3.5)-(3.7), the magnitude and phase, defined as
- •-: 5 - = ------. = _ :- -5- • - -- - :-- • :- T -• g 7 - _-
VW
NRL REPORT 754)^^13
a--P
F 11 (3.11)
1 -I.4 (2--) (3-12)
S+l= trOS
arid
(A•0 E23.13)
where cd.W,^ and^ w^0 ,^ are^ the^ clasic^ damping^ coefficients,^ damped^ natural^ fequency,^ and natural frequency of^ a^ second-order^ system.
3.3 Errors Under Sinusoidal Excitation
A target having a circular^ motion^ is^ used^ to^ represent^ a^ turjIng^ target^ The^ geometry is shown^ in^ Fig.^ 3.2.^ The^ eqaations^ of^ motion^ are
Xm -m +^ Xm^ Cos^ wet^ (3.
-I and
Ym =Ym I+ sin wot^ (3.15)
,v =V V-ELOCTY Ig =^ NORMAL ACCELEPRATl,?N giv
~V^2 /g
_%-I
NN
X., 1 X,
r' Fig. 3.2-Target geomnetry
S EY
I
I
14 BEN H. CANTRFLL
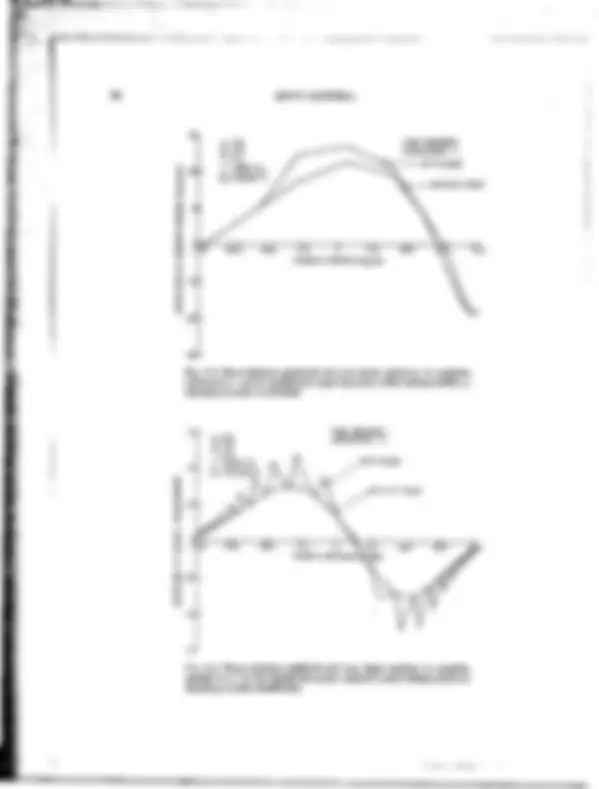
11e waveforms produced^ by^ the^ circular-motion^ target^ are passed^ through^ the^ filter^ de- scribed by Eqs.^ (3.1)-(3.4).^ Since^ Xm,^ Ym^ and the^ operations^ are^ wEll^ defined,^ it^ is^ pos- sible to^ obtain^ a closed-form.^ solution^ for^ R(k^ +^ jim)^ and^ O(k^ +^ Jim).^ However,^ the closed-form solutions^ are^ lengthy^ and^ involved.^ It^ is^ easier^ to^ simply^ compute^ numerically the results under^ various^ conditions.^ The^ error^ between^ the^ predicted^ position^ Yp(k^ +^ jim) and the true target position is computed as^ a^ function^ of^ time^ as^ shown^ in^ Fig.^ 3.3.^ The envelope of the peak error is^ sinusoidal,^ as^ would^ be^ predicted from^ ':near^ system^ theory. In addition, the^ envelope^ of^ the^ lower peaks^ is^ almost^ sinusoidal^ and^ would^ be^ if^ j^ 0. The error shown is^ valid^ only^ ax^ the^ sample^ instants. 12•'F (^) = z 6 ,6 W•.,? V (^) 1v00 ft/s S a: 05 ai 02 ST4s (^) 4s
S411 (^) M
X (^0) 20 40 1OO^170 -:0 S _ TIE (S) x•-4-
-1 2 L Fig. 3.3-Error betweena^ predicted and^ true^ position^ for^ a^ circular-motion^ target
The errors between the^ predicted^ and^ true^ ranges^ and^ the^ predicted^ and^ true^ azimuihs are computed next. Various^ examples^ are^ shown^ in^ Figs.^ 3.4.^ 3.5, and^ 3.6.^ In^ these^ fig- ures, we find that the amount of filtering affects^ the^ envelope^ of^ the^ peak^ error^ and^ the ripple errors. Although not shown, the^ target^ trajectory^ and^ the^ sampling^ time^ also^ affect the error.
3.4 Comparison of Mean Errors^ for^ Cartesian^ and^ Polar^ Coordinate Filters
The a-3 tracker^ in^ polar^ coordinates^ is^ described^ by R~) 1-c) ( -a)~ -F- (1-a (1-)7] (^) R (k-1) I 1 (3..^^ .16).
mk m^ VR~k)1 P)^ Vm -^ 1)^ T