¡Descarga Métodos de Eliminación de Gauss para Resolver Sistemas de Ecuaciones - Prof. González Marc y más Apuntes en PDF de Cálculo solo en Docsity!
Objetivo:
calcular conjunto de valores que satisface simultáneamente un sistema deecuaciones, lineales o no lineales
Tema 5: Sistemas de ecuaciones
Dificultades:
sistemas singulares
(líneas paralelas o superpuestas)
sistemas mal acondicionados
(líneas casi paralelas)
�^
Métodos no numéricos
para resolver sistemas de ecuaciones
�^
Método gráfico para 2 ecuaciones
:
(^222) 1 21 22 2
2 2 22 1 21
(^112) 1 (^1112) 2
1 2 12 1 11
b a x a a x b x a x a
b a x a a x b x a x a
=
→
=
→
representar y hallar
punto de corte
12 10 8 6 4 2 0 0
1
2
3
4
5
x^1
x^2
1 x (^5). 0 (^) x
2 (^1)
= (^10) x 2 + x (^2)
2 (^1)
=
12 10 8 6 4 2 0 0
1
2
3
4
5
x^1
x^2
1 x (^5). 0 (^) x
2 (^1)
= 5 + x x (^2)
2 (^1)
=
10 8 6 4 2 0 0
1
2
3
4
x^1
x^2
1 x (^5). 0 (^) x
2 (^1)
=
(^25). 2 x (^05). 1 x (^2)
2 (^1)
=
�^
Forma general
de un sistema de ecuaciones lineales
Tema 5: Sistemas de ecuaciones
n n nn
(^22) n (^11) n
2 nn 2
2 22 1 21
1 nn 1
2 12 1 11
b x a x a x a b x a x a x a b x a x a x a =
=
=
...
...
... ...
[A]
→
matriz de coeficientes constantes {B}
→
vector columna de términosindependientes constantes {X}
→
vector columna de incógnitas
�^
Representación matricial
�
producto matricial
[^ ]
{^ }
=
→ =
1 2 n 1 2 n nn
(^2) n (^1) n
n 2
22 21
n 1
12 11
b b b x x x a
a a
a
a a
a
a a
B X A^
... ...
...
... ... ... ...
......
�^
Regla de Cramer
: para sistemas pequeños de ecuaciones (2 o 3)
D
a a b
a a b
a a b x^
33 32 3
23 22 2
13 12 1 =^1
D
a b a
a b a
a b a x^
33 3 31
23 2 21
13 1 11 = 2
D
b a a
b a a
b a a x^
3 32 31
2 22 21
1 12 11 = 3
32 31
22 21 13 33 31
23 21 12 33 32
23 22 11 33 32 31
23 22 21
13 12 11
a a
a a a a a
a a a a a
a a a a a a
a a a
a a a D^
−
=
=^
Determinante del sistema
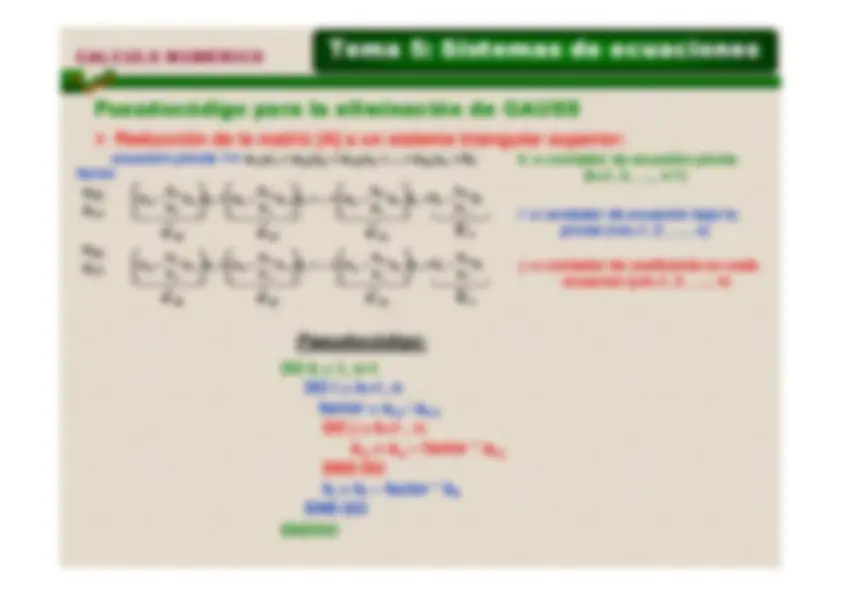
3.1. ELIMINACION DE GAUSS �^
Reducción de la matriz [A] a un sistema triangular superior:^ �
Se elimina la incógnita x
desde la ec. (2) hasta la (n) 1
Para i=
:^ la ecuación queda como está (1)
⇒
ecuación pivote
Tema 5: Sistemas de ecuaciones
(1)
b x a x a x a x
a^
1 nn 1
3 13 2 12 1 11
=
+^
...
(^
)^
1 21 11 nn 1 21 11
3 13 (^2111) 2 12 21 11 1 21
1 nn 1
3 13 2 12 1 11 (^21 )
b a a x a a a
x a a a x a a a x a b x a x a x a x a
a^ a
= + + + + ⇒ = + + +
+^
...
...
Para i=
(ec. 2): multiplicar ec. (1) por
a^21
/a^11
y restar resultado de la ec. (2)
1 (^2111) 2 n n 1 (^2111) n 2
3 13 21 11 23 2 12 (^2111) 22
b a a b x a a a a
x a a a a x a a a a^
−
^
−
^
−
^
−^
...
Para i=3 hasta n
: repetir el procedimiento [multiplicar ec. (1) por
ai
/a^11
y
restar resultado de la ec. (i)]
(^
)^
1 31 11 nn 1 (^3111)
3 13 31 11 2 12 31 11 1 31
1 nn 1
3 13 2 12 1 11 (^31 )
b a a x a a a
x a a a x a a a x a b x a x a x a x a
a^ a
= + + + + ⇒ = + + +
+^
...
...
1 (^3111) 3 n n 1 (^3111) n 3
3 13 31 11 33 2 12 31 11 32
b a a b x a a a a
x a a a a x a a a a^
−
^
−
^
−
^
−^
...
ecuación (1)
�
ecuación pivote
a^11
coeficiente o elemento pivote
3.1. ELIMINACION DE GAUSS �^
Reducción de la matriz [A] a un sistema triangular superior:^ �
Se elimina la incógnita x
desde la ec. (2) hasta la (n 1
)
Tema 5: Sistemas de ecuaciones
(1) 1 nn 1
3 13 2 12 1 11
b x a ... x a x a x a^
=
�^ Se repite el procedimiento para
eliminar x
en las ecuaciones desde i=3 2
hasta n
, usando como
ec. pivote la (2-2)
2)- ( 2 n n 2
3 23 2 22
'b x 'a ... x 'a x 'a
=
1 21 11 2 n n 1 (^2111) n 2
3 13 21 11 23 2 12 (^2111) 22
b a a b x a a a a ... x aaa a x a a a a^
−
^
−
^
−
^
−
1 (^3111) 3 n n 1 31 11 n 3
3 13 31 11 33 2 12 31 11 32
aba b x a a a a ... x a a a a x a a a a^
−
^
−
^
−
^
−
1 (^1) n 11 n n n 1 (^1) n 11 nn 3 13 (^1) n 11 (^3) n 2 12 (^1) n 11 (^2) n^
aba b x a a a a ... x a a a a x a a a a^
−
^
−
^
−
^
−^
2)- (n n n nn
3 (^3) n 2 (^2) n
'b x 'a ... x 'a x 'a
=
2)- ( 3 n n 3
3 33 2 32
'b x 'a ... x 'a x 'a
=
El sistema de ecs. se transforma en:
3)- ( 3 n n 3
3 33
''b x ''a ... x ''a
=
2 32 22 3 n n 2 32 22 n 3
3 23 32 22 33
'b 'a 'a 'b x 'a 'a 'a 'a ... x 'a 'a 'a 'a
−
^
−
^
−
2 32 22 n n 2 32 22
3 23 32 22 2 22 32 22
'b 'a 'a x 'a 'a 'a ... x 'a 'a 'a x 'a 'a 'a
=
2)- ( 2 n n 2
3 23 2 22
'b x 'a ... x 'a x 'a
=
3)- ( 4 n n 4
3 43
''b x ''a ... x ''a
=
+^ …
3)- (n n n nn
3 (^3) n
''b x ''a ... x ''a
=
3.1. ELIMINACION DE GAUSS �^
Sustitución hacia atrás:
Tema 5: Sistemas de ecuaciones
) 1 n( nn
) 1 n( n n^
b a x^
− −
�^
xn^
se obtiene despejándolo directamente de la ecuación (n-n) :
)n n(
b x a^
) 1 n( n
) n (^1) n ( nn^
−
=^
−
−
�^
introduciendo x
en la ecuación n-1 se obtiene el valor de xn
n-
) (
,
) (
, ) (
(^2) n^1 n 1 n
n (^2) n n 1 n (^2) n 1 n (^1) n
a
x
a
b
x^
−^ −−
− −
− − −
)] 1 n( ) 1 n[(
b x a x
a^
n
(^1) n
− − −
=
+^
− −
− − −
−
− −
(n^1 n
(n
n1, n
(n
(^1) n 1,n �^ En general:
) 1 n^1 ij i( ii
j ) 1 i( ij
) 1 i( i i^
a
x
a
b
x^
+= −
−
−^
=^
para i=n-1, n-2, ..., 1.
pseudocódigo
3.1. ELIMINACION DE GAUSS
Tema 5: Sistemas de ecuaciones
�^
Sistemas con algunos coeficientes muy grandes y/o muy pequeños el error se reduce mucho al
intercambiar la fila i por la fila m
(m > i) en la
que
ami
es el mayor por debajo de la diagonal principal
Pivoteo parcial
�^
se
compara
el tamaño de
todos los elementos de la
columna i
desde la diagonal principal hacia abajo
�^
localizada la
fila m
en la que se encuentra el
elemento
de mayor valor absoluto (|a
|), semi
intercambia la fila i por la fila m
, salvo que m= i.
�^
Limitación del método de Gauss:^ si elemento pivote (a
(i-1)ii
surge indeterminación
(la fila i no se
puede utilizar para eliminar los elementos de la columna i que estánpor debajo de la diagonal principal � se
reordenan las ecs., usando como ec. pivote una que tenga todos los coeficientes necesarios �^
si el elemento pivote a
(i-1)ii
= 0
⇒
se halla una fila posterior k (k > i) en la que
(i-1)aii
≠^
0 y se intercambian para obtener pivote no nulo
Técnica del pivoteo
:^ Modificación del método que evita división por cero
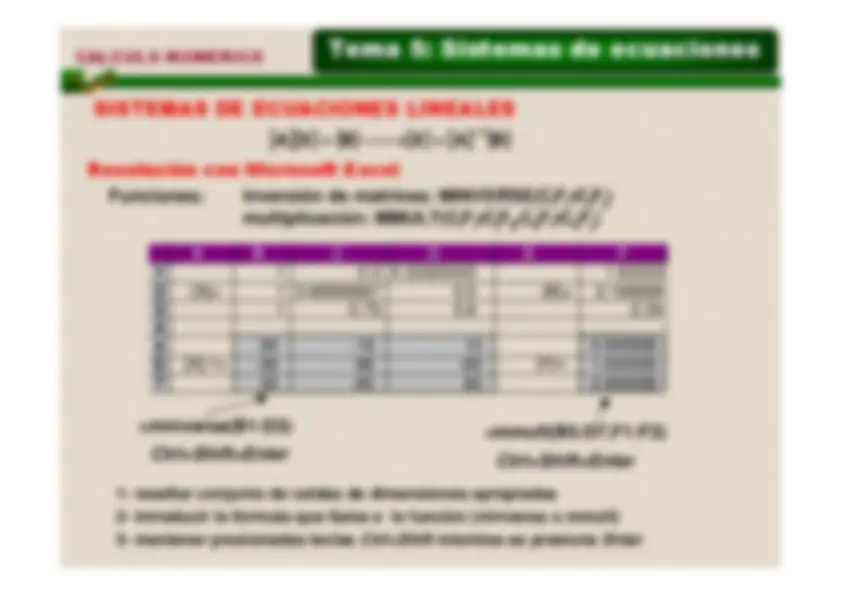
SISTEMAS DE ECUACIONES LINEALES
Tema 5: Sistemas de ecuaciones
Resolución con Microsoft Excel
Funciones:
Inversión de matrices: MINVERSA(C
Fii
:C
Fjj
multiplicación: MMULT(C
Fii
:C
Fjj
,C
Fk
:Ci
Fk
)j
[^
]{^
}^
{^
}^
{^
}^
[^
]^
{^
}B
A
X
B
X
A^
(^1) −
Resolución con Scilab
Funciones:
División izquierda: ---> X=A\BResolucion directa: ---> X=inv(A)*B
---> A=[ 1 1/2 1/3 ; 1 2/3 2/4 ; 1 3/4 3/5];---> B=[ 1.83333;2.166667;2.35];---> X=A\B
1.00001.00001. ---> X=inv(A)*BX =
1.00001.00001.
linsolve
: ---> X=linsolve(A,-B)
3.2. SISTEMAS DE ECUACIONES NO LINEALES
�^
Resolución
aplicar
método de Newton-Raphson
�^
se transforman
las expresiones
en ecuaciones lineales
mediante la
expansión de la serie de Taylor de 1
er^ orden
�^
se aplica la eliminación de Gauss
al sistema resultante
er^1 subíndice (k): representa la ecuación o incógnita 2º sibíndice: representa valor de la función actual (i) o el nuevo (i+1)
Tema 5: Sistemas de ecuaciones
-^
En ellos no se puede despejar una incógnia x
en función del resto.i
Ejemplo:
57 xy 3 y
10 xy x
2 2
=
=
0 57 xy 3 y )y, x(g
0 10 xy x )y, x(f
2 2
= −
=
= −
=
�^
sistema de n ecuaciones
→
n incógnitas
→
se usa
series de Taylor de
múltiples variables o multidimensionales
i i (^1) i i i (^1) i i (^1) i
f) y y y( f) x x x( f f^
∂ ∂ −
∂ ∂ −
≅^
i i (^1) i i i (^1) i i (^1) i
g) y y y( g) x x x( g g^
∂ ∂ −
∂ ∂ −
≅^
�^
para la k-ésima ecuación de un sistema de n ecuaciones:
i,k n i,n (^1) i, n
i,k 2 i, 2 (^1) i, 2 i,k 1 i, 1 (^1) i, 1 i,k (^1) i, k^
f x ) x
x( ... f ) x x
x( f x ) x
x( f
f^
∂ ∂ −
∂^ ∂ −
∂^ ∂ −
=^
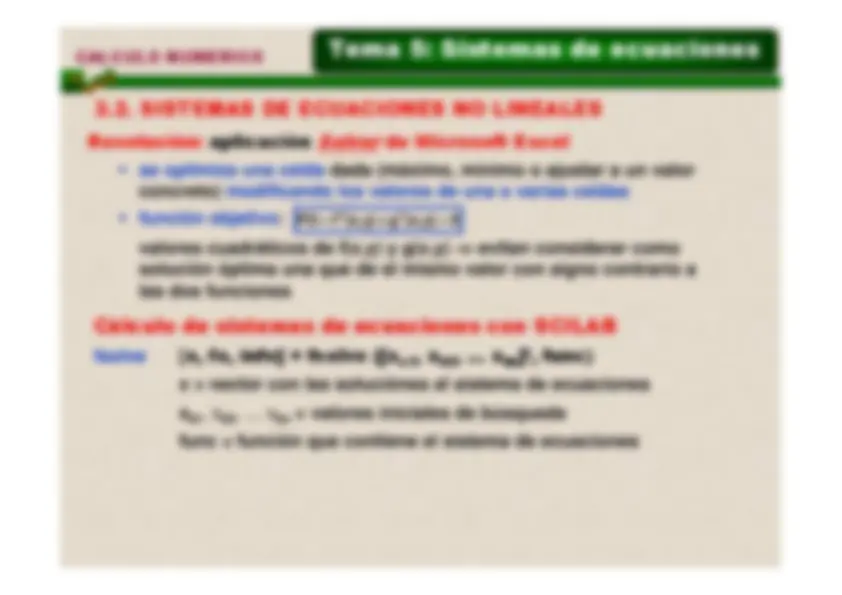
3.2. SISTEMAS DE ECUACIONES NO LINEALES
Tema 5: Sistemas de ecuaciones
Resolución:
aplicación
Solver
de Microsoft Excel
�^
se optimiza una celda
dada (máximo, mínimo o ajustar a un valor
concreto)
modificando los valores de una o varias celdas
�^
función objetivo
valores cuadráticos de f(x,y) y g(x,y)
evitan considerar como
solución óptima una que de el mismo valor con signo contrario alas dos funciones
0 )y, x( g )y, x( f FO
2
2
=
=
Cálculo de sistemas de ecuaciones con SCILAB fsolvefsolve
[x, fx, info] = fsolve ([x
, xo
, … x 02
]’, func)0n
x = vector con las soluciónes al sistema de ecuacionesx^01
, x
, … x 02
0n^
= valores iniciales de búsqueda
func = función que contiene el sistema de ecuaciones
3.3. METODO DE GAUSS-JORDAN
Tema 5: Sistemas de ecuaciones
�^
Es una
variación del método de Gauss
que consiste en
-^
normalizar la ecuación pivote dividiéndola entre su elemento pivote
-^
eliminar las incógnitas
no solo en las ecuaciones siguientes sino
en todas las
ecuaciones del sistema
⇒
se genera una matriz identidad en vez de triangular
-^
no es necesario usar la sustitución regresiva
para obtener la solución definitiva
�^
Gran desventaja
: requiere
≈^
50% más de operaciones que el método de eliminación
de Gauss, por lo que generalmente se prefiere aquel.
3 33 32 31
2 23 22 21
1 13 12 11
c a a a
c a a a
c a a a
' '
' ' '
3 33
2 23 22
1 13 12 11
c a
c a a
c a a a
(^
(^
)^
11 4 13 2 12 1 1
22 3 23 2 2
33 3 3
a x a x a c x a x a c x
a c x
/ / /
' ' '
'' ''^ − − =
−
=^
Sustituciónhaciaadelante Sustituciónhacia atrás
Método de Gauss
3 33 32 31
2 23 22 21
1 13 12 11
c a a a
c a a a
c a a a
)(n 1 )(n 2 )( n 3 c 1 0 0
c 0 1 0
c 0 0 1
)( )(^ )( n 3 3
n 2 2
n 1 1
c x
c x
c x
=^ =^ =
Método de Gauss-Jordan
3.4. METODOS DE DESCOMPOSICION
Tema 5: Sistemas de ecuaciones
�^
Método de resolución:
consiste en los siguientes
pasos
- Descomponer [A] en dos matrices, superior [U] e inferior [L],
tales que [A] = [L][U]
- [L] y {B} se utilizan para determinar {D}
según: [L]{D}={B}
- [U] y {D} se utilizan para determinar {X}
según
[U]{X}={D}
]{
[^
B
X
A^
[U] [L]
- descomposición
]{
[^
D
X
U^
{X}
- hacia detrás
]{
[^
B
D
L^
{D}
- hacia adelante
Sustitución
3.4. METODOS DE DESCOMPOSICION
Tema 5: Sistemas de ecuaciones
�^
Primer paso
�
generar las matrices superior e inferior [U] y [L]
�^
[U] contiene los nuevos coeficientes a
generados en la eliminaciónij
sucesiva de los coeficientes por debajo de la diagonal principal (igualque en la eliminación de Gauss) �^
[L] se construye con los factores de multiplicación de las ecuacionespivote (cada uno en el lugar de la incógnita correspondiente eliminada)
' '' '
]
[
(^2333) 22
13 12 11
a
a
a
a
a
a
U^
f
f
f
L
32 21 31
]
[
(^2111) 21
a a
f^
=^
31 11 31
a a
f^
=^
' 32 ' 22 32
a a
f^
3.4. METODOS DE DESCOMPOSICION
Tema 5: Sistemas de ecuaciones
�^
Tercer paso
�
Con matriz [U] y vector {D} se obtiene {X}: [U]{X}={D}
(coincide con la sustitución hacia atrás de la eliminación gaussiana)
11
22
(^333) 23 2 12 (^333) 13 1 1 1 3 13 2 12 1 11
22
(^333) 23 2 2 2 3 23 2 22
(^333) 3 3 3 33
u
u
d u u d u d u u d x d x u x u x u u
d u u d x d x u x u
d u x d x u
^
− − − = → = + +
−
→
= → =
En
forma genérica
:^
n^1 ij ii
jij
i i^
u
xu
d x
−^ ∑+= =^
para i=n-1, n-2, ..., 1.
=
1 2 3 (^123) 2333 22
13 12 11
d d d x x x u 0 0
u u 0
u u u
3.5. METODO DE GAUSS-SEIDEL
Tema 5: Sistemas de ecuaciones
�^
Método iterativo para hallar una solución aproximada
de sistemas de ecs.
(planteamiento
similar a los métodos abiertos de búsqueda de raices)
Suponiendo sistema de tres ecuaciones:Si los elementos de la diagonal no son todos cero
⇒
despejar:
=
1 2 3 1 2 3 33 32 31
23 22 21
13 12 11
b b b x x x a a a
a a a
a a a
11
3 13 2 12 1 1
a
x a x a b x^
− − =^
22
3 23 1 21 2 2
a
x a x a b x^
− − =
33
2 32 1 31 3 3
a
x a x a b x^
− − =
-^ Primera estimación
: suponer x
= x 2
= 0 3
⇒
(^111) 1
b a x^ =
-^ Con el valor de x
y x 1
=0 3
2
1 21 2 2
a
x a b x^
−
-^ Con los valores de x
y x 1
33
2 32 1 31 3 3
a
x a x a b x^
− − =
-^ Siguientes iteraciones:
Con los valores de x
y x 2
obtenidos en la 1º estimacion 3
se recalcula x
, y así sucesivamente 1
-^ Iterar hasta que
:^
s
j i
(^1) j i j i ia
(^100) x x x x^
ε<
−
ε
−
,
error aproximado de cada incognita
(x^1
en fila 1)
(x^2
en fila 2)
(x^3
en fila 3)
abs(norm(x
j-x
j-1))<
n ij, 1 ii εs
j
jij
i i^
a
xa
b x
− (xi^ =
en fila i)