


Cinemática Relativista
• Transformaciones de Lorentz
• Variables cinemáticas invariantes
• Sistemas de referencia
• Cinemática de la colisión a+b 1+2
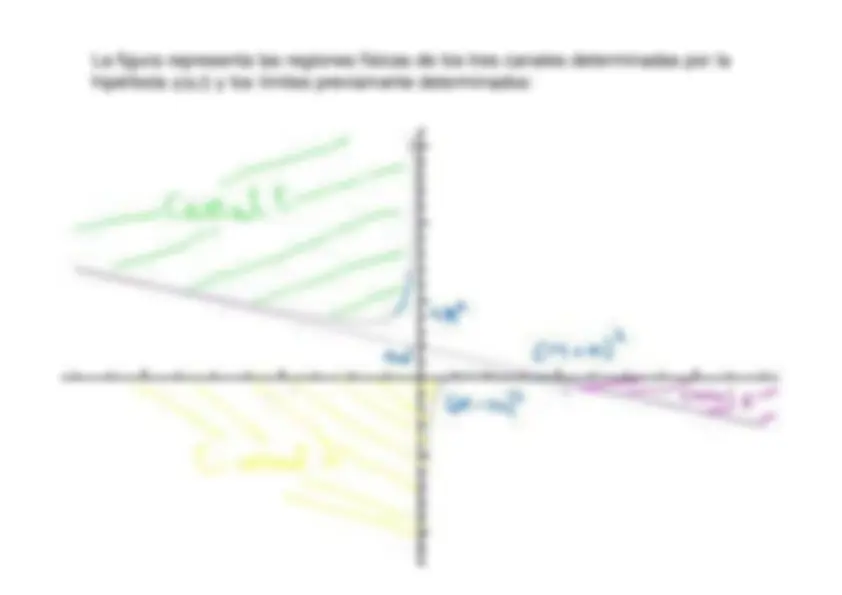
• Regiones físicas de s,t,u
• Desintegraciones
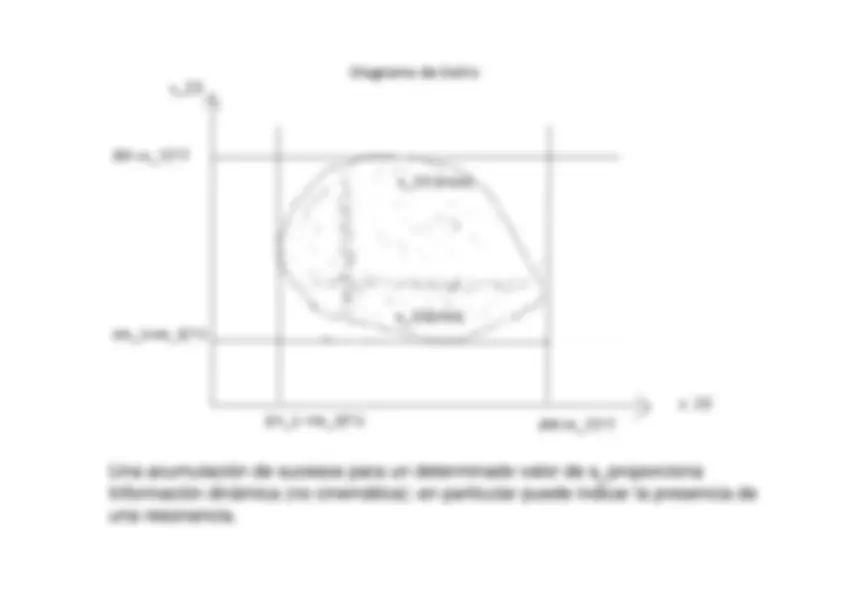
• Procesos inclusivos

















Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: Mecànica teòrica, Profesor: José Peñarrocha, Carrera: Física, Universidad: UV
Tipo: Apuntes
1 / 26

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Principio de relatividad : todas las leyes de la naturaleza son las mismas en todo sistema de referencia inerciales (se mueven con velocidad constante). Consideremos un suceso en el espacio cuadridimensional Definimos el producto escalar, usando la convención de Einstein : donde gel llamado tensor métrico : Las cantidades x de denominan componentes contravariantes del cuadrivector x, mientras que las componentes x definidas como covariantes.
Las matrices del grupo de Lorentz vienen pues caracterizadas por la propiedad Es inmediato comprobar que Las rotaciones tridimensionales caracterizadas por son un subconjunto de las transformaciones de Lorentz definidas en cuatro dimensiones en la forma Otro subconjunto importante son los llamados boosts de Lorentz que describen la transformación entre dos sistemas de referencia inerciales con dos ejes espaciales paralelos y movimiento relativo según el tercero, por ejemplo si el desplazamiento es respecto al eje z:
Todas las transformaciones de Lorentz con det y 1 (subgrupo propio ortocrono pueden ser generadas a partir de rotaciones y boosts: La primera rotación pone el eje z en la dirección de la velocidad relativa entre los dos sistemas inerciales. El boost genera dicha velocidad y la segunda rotación da la orientación definitiva. Las transformaciones del grupo propio ortocrono pueden obtenerse mediante transformaciones infinitésimales a partir de la identidad. Existen además dos tipos de transformaciones “impropias” que no pertenecen a este subgrupo y que por lo tanto no satisfacen esta última propiedad y que corresponden a la inversión respecto de los ejes espaciales P y temporales T
El proceso de colisión a + b 1 + 2 está caracterizado por 2 variables independientes. Introducimos las llamadas variables de Mandelstam, que son invariantes Lorentz.: En función de estas variables, podemos expresar las energías y momentos finales, una vez hayamos fijado el sistema de referencia.
Consideremos el proceso de colisión a +b 1+2 ; pa + pb = p 1 + p (^2) que recibe el nombre de canal s porque la energía del centro de masas en este canal es la variable s. En este canal se satisfacen las condiciones:
Desde el punto de vista cinemático cualquier partícula entrante (saliente) se puede considerar también como una partícula saliente (entrante) con cuadrimomento opuesto. Así pues podemos definir los llamados procesos cruzados
La figura representa las regiones físicas de los tres canales determinadas por la hipérbola (s,t) y los límites previamente determinados: