¡Descarga Transformación señales analógicas a digitales en robótica: sensores US-016 y E18-D80NK y más Monografías, Ensayos en PDF de Circuitos Digitales solo en Docsity!
UNIVERSIDAD NACIONAL DE TRUJILLO
Facultad de Ingeniería
Programa de Ingeniería Mecatrónica
“Diseño e implementación de un robot móvil solucionador de laberinto
empleando lógica secuencial”
INFORME FINAL
Electrónica Digital
ESTUDIANTE(S) :
Magán Armas Cesar Ailton Joaquín Polo Añorga Renato Juda Polo González Diego Jesús Sánchez Rodríguez Sebastián Reinhold Oskar Ulloa Reyes Jaime Enrique ESTUDIANTE(S) : Grupo 6 DOCENTE : Fiestas Ugaz Antonio Fiestas CICLO : 2022 – I
Trujillo, Perú
INDICE
- INTRODUCCIÓN........................................................................................................................... INDICE............................................................................................................................................ii
- CONCEPTO DE SOLUCIÓN.........................................................................................................
- 1.1. Propuesta General............................................................................................................
- 1.2. Explicación paso a paso del proceso...............................................................................
- DISEÑO...........................................................................................................................................
- 2.1. Definición señales digitales.............................................................................................
- 2.2. Diagrama de bloques de componentes............................................................................
- 2.3. Definimos salidas para el funcionamiento del circuito....................................................
- 2.4. Señal de generador de reloj..............................................................................................
- 2.5. Análisis con lógica secuencial para el diseño del circuito.............................................
- ANÁLISIS.....................................................................................................................................
- 3.1. Tabla de transición.........................................................................................................
- 3.2. Flujo normal de Secuencia.............................................................................................
- SIMULACIÓN..............................................................................................................................
- 4.1. Uso de la memoria EEPROM........................................................................................
- 4.2. Simulación del circuito en Proteus................................................................................
- 4.3. Transformación de señal analógica a digital para sensor analógico..............................
- IMPLEMENTACIÓN...................................................................................................................
- 5.1. Implementación en la realidad.......................................................................................
- 5.2. Explicación del funcionamiento en la realidad..............................................................
- CONCLUSIONES.........................................................................................................................
CONCEPTO DE SOLUCIÓN.........................................................................................................
1.1. Propuesta General............................................................................................................
Uno de los métodos más conocidos para resolver laberintos es el de seguir la mano derecha o izquierda en todo momento. Figura 1. Idea del recorrido del reloj por lógica de mano derecha. De este modo el robot se guiaría de la pared derecha usando un sensor de proximidad, asegurando estar siempre a una distancia que será establecida por nosotros. Sin embargo, existe un caso más, y es cuando nos encontramos con un camino cerrado, o un camino en L hacia la izquierda (en ambos casos no se da la posibilidad de girar a la derecha). En dicho caso nos veríamos obligados o bien a girar 180 grados para regresar por el mismo camino por donde se vino o bien girar a la izquierda y continuar de frente.
1.2. Explicación paso a paso del proceso...............................................................................
Para lograr esto se colocó un sensor frontal de modo que cuando el robot llegue a una pared frontal, inmediatamente deberá girar sobre su eje hacia la izquierda, ya que la única forma de llegar a una pared frontalmente es que no haya habido un espacio a la derecha que le permita girar lo que indicaría que necesariamente se encuentra o en un camino cerrado o en un camino en L hacia la izquierda. Debido a esto se concluyó que bastaría con tener dos sensores principales, uno a la derecha y otro al frente. Para evitar que el robot choque con las paredes en los caminos rectos se optó por incluir dos sensores al lado derecho, uno con un umbral de distancia más corto que el otro. Sin embargo, para ahorrar cortos se hizo uso de un sensor analógico cuya señal es enviada a dos Opamps en modo Trigger Smith, con el fin de obtener dos señales distintas (cada una con diferente umbral como ya se indicó). Así estaremos teniendo dos señales a partir de un único sensor. Para el sensor frontal (S1) se hará uso de un sensor de proximidad infrarrojo digital E18-D80NK:
izquierda, y al cambiar este ligeramente de orientación la distancia a detectar disminuirá rápidamente haciendo así que vuelva al estado 00.
DISEÑO
2.1. Definición señales digitales.............................................................................................
Tenemos 2 sensores (S1, S2) en el circuito, donde estos mandan 3 señales digitales (F, C, L), en el cual el sensor S1 emite 1 señal y al ser digital no mide magnitudes, en cambio nuestro sensor S2 al ser analógico mide una distancia a metros y convierte estos a un voltaje de 0 a 5V. Figura 5. Rangos posibles y sus ecuaciones del sensor analógico. Se optó por tomar la menor distancia posible del sensor, de 0-1.024 m, para una mayor precisión en la medición donde esta se transforma a voltaje forma lineal con la siguiente formula: V (^) out =
D
×V CC
Para que esta relación suceda, se deben conectar el “range” de nuestro S2 a GND (0V).
Figura 6. Señalización del pin al cuál conectar. Gráfica transformación voltaje lineal: Figura 7. Tanque de almacenamiento de gas empernado. Así nuestro sensor analógico S2 emitirá 2 señales (C, L). Tabla 1. Señales digitales Sensores S1 y S2. Señal Digital (F, C, L) Descripción 0 Detecta pared 1 Detecta vacío También contaremos como actuadores a los 2 motores:
Por lo tanto, se tendrán las salidas: AMI (Motor Izquierda), BMI (Motor Izquierda), AMD (Motor Derecha), BMD (Motor derecha) Para una optimización del circuito se agregaron reguladores de velocidad de cada motor como salidas: VMI (Motor Izquierda), VMD (Motor Derecha) Analizando el sistema, observamos que se necesitan 3 movimientos: Avanzar, giro a la derecha y giro a la izquierda, y giro sobre su eje cabe resaltar que no deseamos que el robot frene. Para realizar estos movimientos haremos una tabla: Tabla 4. Tabla lógica de velocidades de los motores. AMI BMI AMD BMD VMI VMD Movimiento 0 1 0 1 1 1 Avanzar 0 1 0 1 0 1 Giro Derecha 0 1 0 1 1 0 Giro Izquierda 1 0 0 1 0 1 Giro sobre su eje
Por lo tanto, podemos simplificar la tabla en función de AMI, vemos que AMD Y BMD serán constantes y el BMI la negación de AMI, por lo tanto, tendremos como salidas para nuestro circuito: AMI, VMI, VMD Con esta simplificación podemos relacionar: AMI=0 -> Avanzar AMI =1 -> Retroceder
De esta forma notamos que lo ideal sería que RB sea igual a 0, sin embargo, por protección colocaremos una RB lo suficientemente pequeña del siguiente modo: RB R (^) A
→ R A ≈ RA + RB
Eligiendo: RA = 100 k Ω RB = 1 k Ω Para la señal de reloj, deseamos una señal de una frecuencia de 60Hz. Reemplazando en la fórmula: 60 =
( RA + 2 RB ) C
Reemplazando con RA y RB : 60 =
( 100 k Ω + 2 k Ω ) C C =0.24 uF Elegimos un valor cercano: C =0.2 uF
2.5. Análisis con lógica secuencial para el diseño del circuito.............................................
Primero definimos estados: Como dijimos se tienen 4 movimientos, por lo que tenemos 4 estados, llamados: Estado 0: De frente / Avanzar Estado 1: Giro izquierda Estado 2: Giro derecha Estado 3: Giro sobre su eje Tabla 5. Tabla de estados en código binario. Estado (Dec) Estado (Bin) E Q0 Q 0 0 0 1 0 1 2 1 0 3 1 1 Posteriormente realizamos una máquina de estados de Mealy: Analizando los cambios de estado: De frente:
- Inicialmente al encender el robot, este avanzará. (F=1, C=1, L=0) -> (Estado 0)
- Cuando el robot está moviéndose hacia el frente, este girará a la izquierda siempre que el sensor corto y medio-largo inclinado detecte una pared siendo además el único caso posible donde no exista una pared al frente. F = 1 C=0 L= -> (Estado1)
- Cuando el robot está moviéndose hacia el frente, este girará a la derecha siempre que el sensor detecte un camino a la derecha adelante siendo el mismo caso si hay una pared al frente o al costado o no. F = 1 L=1 C=1 -> (Estado2)
1.2) Cuando no se detecta una pared al frente, pero si se detecta una pared cercana a la derecha. F=1 C=0 L=X -> (Estado 3)
- El robot pasa de girar sobre su eje a avanzar hacia al frente cuando no se detecta una pared adelante ni una pared cercana a la derecha. F=1 C=1 L=x -> (Estado 0) Por lo tanto, tenemos un diagrama de estados de Miley: Figura 10. Máquina de estados Mealy para Robot. Con este diagrama y el análisis hecho podemos hallar la tabla donde tengamos relacionados los cambios de estados con las salidas y entradas.
Tabla 6. Tabla de verdad final del sistema. Q1 Q0 F C L Q1' Q0' AMizq (0=avanzar)
VM
(0=v1)
VM
Una vez teniendo esta tabla de verdad, procederemos a usarla en la memoria EPROM para simplificar el circuito y ahorrarnos realizar funciones lógicas.
3.2. Flujo normal de Secuencia.............................................................................................
Figura 11. Diagrama de flujo del circuito.
SIMULACIÓN..............................................................................................................................
4.1. Uso de la memoria EEPROM Con el fin de ahorrar el uso de compuertas lógicas utilizamos una memoria EEPROM con la cual grabamos cada salida respecto a cada entrada. Para realizar esto hicimos uso del programa Max Loader. Figura 12. Grabación de memoria.
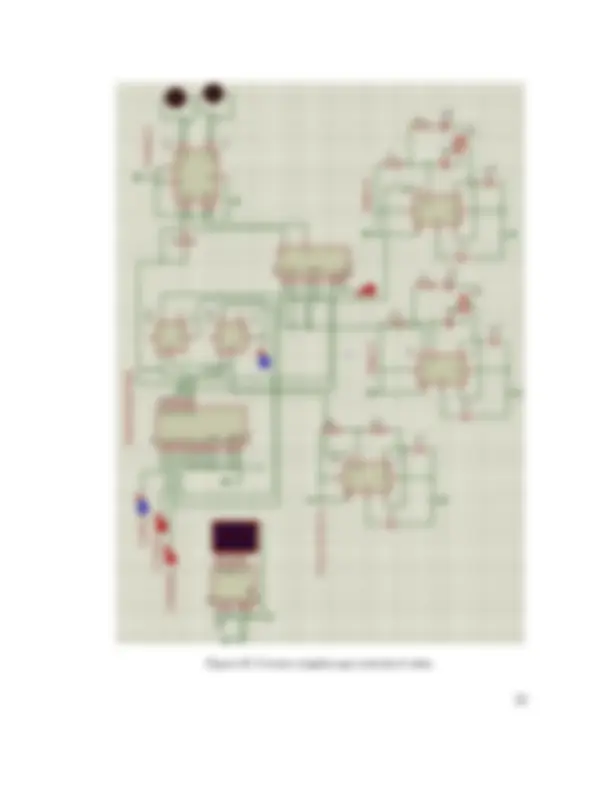
4.2. Simulación del circuito en Proteus................................................................................
El archivo que obtenemos del programa, lo abrimos con la memoria 27C64 en Proteus. Así mismo, implementamos esta parte del circuito que llamaremos de CONTROL. Las entradas de la memoria son los bits de estado, y señales de los sensores. Por otro lado, para las salidas tenemos las de nuevo estado que son conectados a flip flops tipo D. Las demás salidas son para controlar el movimiento de las ruedas. También consideramos añadir un display de 7 segmentos para mostrar el estado en que nos encontramos.