¡Descarga Ctrl control documento y más Ejercicios en PDF de Derecho solo en Docsity!
Control Analógico I
DR. FERNANDO ORNELAS TELLEZ
19 de abril de 2020
Resumen Los sistemas control ...
1. Introducción a los Sistemas de Control
¿Qué es control? Es la acción o el efecto de poder decidir sobre el desarrollo de un proceso o sistema. También se puede entender como la forma de manipular ciertas variables para conseguir que ellas u otras variables actúen en la forma deseada. Controlar significa medir el valor de la variable controlada del sistema y aplicar la variable manipulada al sistema para corregir o limitar una desviación del valor medido a partir de un valor deseado.
¿Qué es Ingeniería de control? Es un enfoque interdisciplinario para el control de sistemas y dispositivos. Combina áreas como eléctrica, electrónica, mecánica, química, ingeniería de procesos, teoría matemática entre otras.
Control Automático. Es el uso de elementos sistemáticos para el control industrial de maquinaria y/o procesos, rediciendo la intervención humana, quedando éste último sólo como supervisor.
Entre los beneficios del control automático es que se cuenta con sistemas actuando de forma autónoma, rediciendo exigencias sensoriales y mentales por parte del humano, así como reducción de riesgos físicos, etc.
1.1. Revisión histórica del control
1.2. Definiciones
Sistema. Es una combinación de componentes que actúan conjuntamente para lograr cierto objetivo. El concepto de sistema se puede aplicar a fenómenos físicos, biológicos, económicos, sociales y otros.
Variable controlada (salida). Es la cantidad o condición que se mide y controla. Variable manipulada (entrada). Es la variable que se modifica con el fin de afectar la variable controlada. Actuador. Mecanismo o dispositivo el cual permite la entrada al sistema de control. Proceso. Es el desarrollo natural de un acontecimiento, caracterizado por una serie de eventos o cambio graduales, progresivamente continuos y que tienden a un resultado final. En este curso se llamará proceso a cualquier operación que se va a controlar. Algunos ejemplos son los procesos químicos, económicos, biológicos, etc.
Planta. Conjunto de piezas de una maquinaria que tienen por objetivo realizar cierta actividad en conjunto. En sistemas de control, por planta se entiende el sistema que se quiere controlar.
Perturbaciones. Una perturbación es algún suceso que afecta adversamente el desarrollo de algún pro- ceso. Si la perturbación se genera dentro del sistema, se le denomina perturbación interna, caso contrario la perturbación externa.
1.3. Características de los sistemas de lazo cerrado y de lazo abierto
1.3.1. Sistema de control de lazo abierto
Es un sistema de control en donde la salida no tiene efecto sobre la acción de control. La salida puede ser o no ser medida, pero esa medición no afecta al controlador. [3]
Un ejemplo practico es una lavadora, cuya operación se basa en tiempo únicamente. En cualquier sistema de control en lazo abierto, la salida no se compara con la entrada de referencia. Por tanto, en el sistema de control, la precisión del sistema depende de la calibración. Ante la presencia de perturbaciones, un sistema de control en lazo abierto no realiza la tarea deseada. En la práctica, el este control se usa si se conoce la relación entre la entrada y la salida y si no hay perturbaciones internas ni externas.
1.3.2. Sistema de control retroalimentado o de lazo cerrado
Es aquel sistema de control que utiliza alguna relación entre la variable de salida y alguna variable de referencia, como medio de control [3].
En un sistema de control en lazo cerrado, se alimenta al controlador la señal de error de actuación, que es la diferencia entre la señal de entrada y la señal de realimentación, a fin de reducir el error y llevar la salida del sistema a un valor conveniente. El término control en lazo cerrado siempre implica el uso de una acción de control retroalimentado para reducir el error del sistema.
1.3.3. Sistemas de control en lazo cerrado en comparación con los sistemas en lazo abierto
Una ventaja del sistema de control en lazo cerrado es que el uso de la realimentación vuelve la respuesta del sistema relativamente insensible a las perturbaciones externas y a las variaciones internas en los parámetros del sistema.
Desde el punto de vista de la estabilidad, el sistema de control en lazo abierto es más fácil de desarrollar, porque la estabilidad del sistema no es un problema importante. Por otra parte, la estabilidad es una función principal en el sistema de control en lazo cerrado, lo cual puede conducir a corregir errores que producen oscilaciones de amplitud constante o cambiante.
1.4. Ejemplos de sistemas de control
Control de temperatura
Control de sistemas mecánicos
Sistemas eléctricos (voltaje, frecuencia)
Robots (control de posición)
Control de motores (velocidad, posición, par, flujos)
Regulación de presión
Control de nivel de líquido
Regulación de voltaje
1.5. Objetivos del análisis y diseño
1.6. El proceso de diseño
o bien, la corriente
iC (t) = C
dvC (t) dt
Por tanto, aplicando ley de voltajes de Kircchoff, la ecuación de diferencial que describe la relación corriente- voltaje en el circuito es
v(t) = R i(t) + vC (t)
= R i(t) +
C
i(t) dt.
Aplicando la transformada de Laplace
V (s) = R I(s) + VC (s)
= R I(s) +
s C
I(s)
R +
s C
I(s)
Finalmente, la función de transferencia es
VC (s) V (s)
s RC + 1
=
R C
s + 1/R C
Ejemplo: (Circuito RL) Determine la ecuación diferencial que describe la corriente en el inductor en función del voltaje aplicado.
Partiendo del hecho que la corriente en un inductor está dado por
iL =
L
vL(t) dt
o bien, el voltaje
vL(t) = L
diL(t) dt
Por tanto, aplicando ley de voltajes de Kircchoff, la ecuación de diferencial que describe la relación corriente- voltaje en el circuito es
v(t) = R iL(t) + vL(t)
= R iL(t) + L
diL(t) dt
Así, la función de transferencia resulta en
IL(s) V (s)
Ls + R
=
L
s + R/L
2.1.1. Linealidad
Un sistema se dice que es lineal si satisface las siguientes propiedades:
- y(t; αx 1 + βx 2 , 0) = αy(t; x 1 , 0) + βy(t; x 2 , 0)
- y(t; αx 0 , δu) = αy(t; x 0 , 0) + δy(t; 0, u)
- y(t; 0, δu 1 + γu 2 ) = δy(t; 0, u 1 ) + γy(t; 0, u 2 )
La propiedad 2 es la descomposición usual de un sistema en la respuesta homogénea (u = 0) y la respuesta particular (x 0 = 0).
La propiedad 3 es la definición formal del principio de superposición.
Un sistema es no lineal si no se aplica el principio de superposición. Por tanto, para un sistema no lineal la respuesta a dos entradas no puede calcularse tratando cada una a la vez y sumando los resultados.
(Tarea) Simular un sistema lineal y uno no lineal para comprobar el principio de superposición:
x ˙ = −a x + u, x(0) = x 0 , a > 0 , y = x
x ˙ = −a x^3 + u, x(0) = x 0 , a > 0 , y = x
Simular para una entrada tipo escalón (u 1 = 1, u 2 = 2) o entradas sinusoidales.
2.2. Modelado mediante ecuaciones de estado
Modelo Matemático de un Sistema Dinámico: Es un conjunto de ecuaciones que representan con cierto grado exactitud la dinámica del sistema físico. El modelo se describe generalmente como un operador entre las entradas y salidas del sistema, o como un conjunto de ecuaciones diferenciales (caso continuo) y/o en diferencias (caso discreto.
Representación en Espacio de Estado: El ente matemático para la representación de los sistemas dinámicos a estudiar será el de su representación en espacio de estados. Note que para sistemas dinámicos no lineales, no es posible su representación en el dominio de la frecuencia, como lo es para sistemas lineales.
Necesidad de Análisis en Espacio de Estados: Los sistemas modernos de control son altamente com- plejos debido a:
Múltiples entradas y salidas
Sistemas variantes en el tiempo
Dinámica no lineal
Las últimas dos características no pueden ser analizadas fácilmente por los métodos clásico o incluso imposibles de analizar.
Estado: Es el conjunto más pequeño de variables (variables de estado) tal que con el conocimiento de éstas en t = t 0 y el conocimiento de la entrada u para t ≥ t 0 , se puede determinar por completo el comportamiento futuro del sistema dinámico.
A partir del concepto de función de transferencia, es posible representar la dinámica de un sistema mediante ecuaciones algebraicas en s. La potencia más alta de s en el denominador de la función de transferencia define el orden del sistema; para la FT anterior, el sistema es de orden n^1.
2.3.1. Polos y ceros de una función de transferencia
En aplicaciones de ingeniería de control, la función de transferencia de un sistema se puede expresar en la forma de ceros y polos, considerando como ceros aquellas raíces de G(s) tal que G(s) = 0 y como polo aquellas raíces que hacen a G(s) = ∞, se puede escribir entonces
G(s) =
Y (s) U (s)
K (s − z 1 ) (s − z 2 ) · · · (s − zm) (s − p 1 ) (s − p 2 ) · · · (s − pn)
donde los pi, con i = 1, 2 ,... , n son los polos de G(z), mientras que los zj , con j = 1, 2 ,... , m son los ceros de G(z).
Nota: La aplicación del concepto de función de transferencia está limitada a los sistemas descritos mediante ecuaciones diferenciales lineales invariantes con el tiempo. Algunos aspectos importantes relacionados con la FT son [3]:
- La función de transferencia de un sistema es un modelo matemático expresa algebraicamente a la ecuación diferencial que relaciona la variable de salida con la variable de entrada.
- La función de transferencia es una propiedad de un sistema, independiente de la magnitud y naturaleza de la entrada o función de excitación.
- La función de transferencia incluye las unidades necesarias para relacionar la entrada con la salida; sin embargo, no proporciona información acerca de la estructura física del sistema. (Las funciones de trans- ferencia de muchos sistemas físicamente diferentes pueden ser idénticas.)
- Si se conoce la función de transferencia de un sistema, se estudia la salida o respuesta para varias formas de entrada, con la intención de comprender la naturaleza del sistema.
- Si se desconoce la función de transferencia de un sistema, puede establecerse experimentalmente introdu- ciendo entradas conocidas y estudiando la salida del sistema. Una vez establecida una función de transfe- rencia, proporciona una descripción completa de las características dinámicas del sistema, a diferencia de su descripción física.
Ejemplos de sistemas dinámicos descritos funciones de transferencia: circuito RC, RL, RLC, tem- peratura de un horno (mediante una ecuación diferencial lineal de primer orden τ y˙ = −y + K u), etc.
Teorema del Valor Inicial: f (0+) = l´ıms→∞ s F (s). Teorema del Valor Final: (Si el sistema es estable) l´ımt→∞ f (t) = fss = l´ıms→ 0 s F (s).
2.4. Funciones de transferencia de elementos en cascada
Se dice que dos o mas elementos de un sistema están en cascada cuando la salida de el primero es la entrada del segundo, y así sucesivamente.
El concepto de sistemas en cascada se puede dar en dos casos:
- Si los elementos no se cargan. Por ejemplo, un Circuito RC – Amplificador de Ganancia Unitaria – Circuito RC. Ejercicio: determinar su función de transferencia.
- Si el segundo elemento ejerce una carga sobre el primero, el tercero sobre el segundo, etc. Por ejemplo, un Circuito RC – Circuito RC. Ejercicio: determinar su función de transferencia.
(^1) Recuerde la transformada: L
{ (^) dn dtn^ f (t)
} = snF (s) − ∑n k=1 sn−k^ f^ (k−1)(0), donde^ f^ (k−1)(t) =^
dk−^1 dtk−^1 f (t).
Para el segundo caso se tiene el siguiente circuito:
Para obtener la función de transferencia considere: ei = R 1 i 1 + VC 1 (1) VC 1 = R 2 i 2 + VC 2 (2) De (2) en (1) ei = R 1 i 1 + R 2 i 2 + VC 2 (3)
C 1 dVC 1 dt
= i 1 − i 2 (4)
De (4) y (3) se tiene
ei = R 1
[
C 1
dVC 1 dt
]
+ R 2 C 2
dVC 2 dt
ei = R 1 C 1 dVC 1 dt
+ R 1 C 2
deo dt
+ R 2 C 2
deo dt
Derivando (2) w.r.t. al tiempo se tiene que dVC 1 dt
= R 2
di 2 dt
deo dt dVC 1 dt
= R 2 C 2
d^2 eo dt^2
deo dt
Sustituyendo (6) en (5) se tiene que
ei = R 1 C 1 R 2 C 2 d^2 eo dt^2
+ R 1 C 1
deo dt
+ R 1 C 2
deo dt
+ R 2 C 2
deo dt
Aplicando la transformada de Laplace Ei(s) =
[
R 1 C 1 R 2 C 2 s^2 + (R 1 C 1 + R 1 C 2 + R 2 C 2 ) s + 1
]
Eo(s) por lo que Eo(s) Ei(s)
R 1 C 1 R 2 C 2 s^2 + (R 1 C 1 + R 1 C 2 + R 2 C 2 ) s + 1
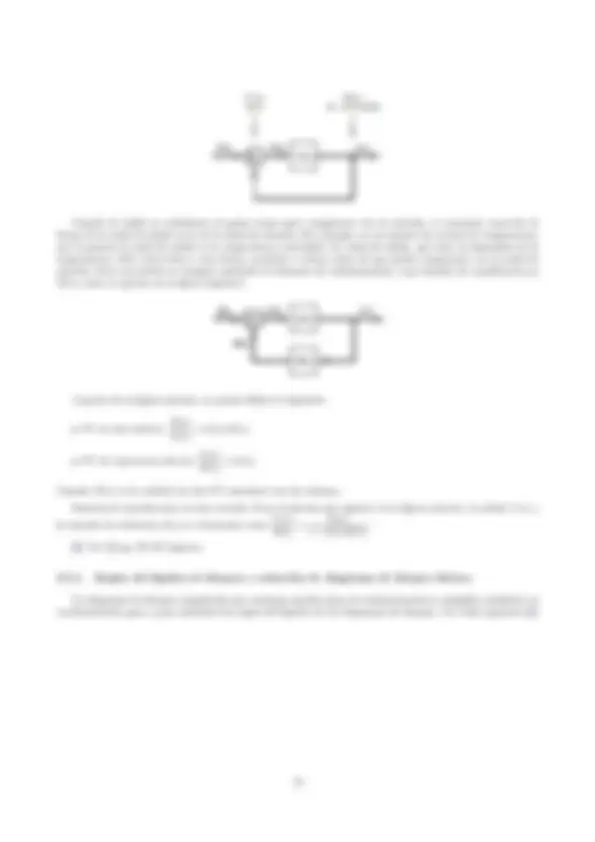
Cuando la salida se realimenta al punto suma para compararse con la entrada, es necesario convertir la forma de la señal de salida en la de la señal de entrada. Por ejemplo, en un sistema de control de temperatura, por lo general la señal de salida es la temperatura controlada. La señal de salida, que tiene la dimensión de la temperatura, debe convertirse a una fuerza, posición o voltaje antes de que pueda compararse con la señal de entrada. Esta conversión se consigue mediante el elemento de realimentación, cuya función de transferencia es H(s) como se aprecia en la figura siguiente.
A partir de la figura anterior, se puede definir lo siguiente:
FT en lazo abierto:
B(s) E(s)
= G(s) H(s)
FT de trayectoria directa: C(s) E(s)
= G(s).
Cuando H(s) es la unidad, las dos FT anteriores son las mismas.
Función de transferencia en lazo cerrado. Para el sistema que aparece en la figura anterior, la salida Y (s) y
la entrada de referencia R(s) se relacionan como Y (s) R(s)
G(s) 1 + G(s)H(s)
[3]. Ver [1] pp. 39 del impreso.
2.5.1. Reglas del álgebra de bloques y reducción de diagramas de bloques básicos
Un diagrama de bloques complicado que contenga muchos lazos de realimentación se simplifica mediante un reordenamiento paso a paso mediante las reglas del álgebra de los diagramas de bloques. Ver tabla siguiente [3]:
La simplificación de un diagrama de bloques mediante re-ordenamientos y sustituciones reduce de manera considerable la labor necesaria para el análisis matemático subsecuente. Sin embargo, debe señalarse que, con- forme se simplifica el diagrama de bloques, las funciones de transferencia de los bloques nuevos se vuelven más complejas, debido a que se generan polos y ceros nuevos.
Ejemplo:
Ejercicio: Reduzca el siguiente diagrama de bloques ([3]: pp. 115, ejercicio A.3.1, del impreso)
EJEMPLO: Determine la función de transferencia de un sistema MIMO donde G(s) y H(s) son
G(s) =
s + 1
s 2
s + 2
;^ H(s) =
[
]
SOL:
Ver [2] pp. 86 del impreso. Ver [1] pp. 55 del impreso. Ejemplo de un sistema MIMO: Un circuito con la siguiente descripción: Fuente-RC-RC-R-Fuente (pa- recido a un circuito pi), donde se tienen dos entradas y dos salidas (los voltajes en cada capacitor).
En la práctica, muchos sistemas electromecánicos, hidráulicos, neumáticos, etc., involucran relaciones no lineales entre las variables. Por ejemplo el péndulo simple (hacer figura del péndulo simple), donde su compor- tamiento dinámico se describe por una ecuación diferencial no lineal
ml d^2 θ(t) dt^2
- mg sin θ(t) + kl dθ(t) dt
= u
donde θ(t) es el ángulo, u es el par aplicado al péndulo, m es la masa, l es la longitud del péndulo, g es la gravedad y k es el coeficiente de fricción.
Otros ejemplos, la salida de un componente puede saturarse para señales de entrada grandes. Puede haber una zona muerta que afecte las señales pequeñas. (La zona muerta de un componente es un rango pequeño de variaciones de entrada ante las cuales el componente es insensible). Puede ocurrir una no linealidad de la ley cuadrática en algunos componentes.
2.9. Modelado de sistemas eléctricos
Las relaciones de voltaje y corriente para el capacitor son:
VC (t) =
C
iC (t) dt, iC (t) = C
dVC (t) dt
Las relaciones de voltaje y corriente para el inductor son:
VL(t) = L
diL(t) dt
, iL(t) =
L
VL(t) dt.
Ver [3] pp. 87 del pdf y pp. 90 del impreso.
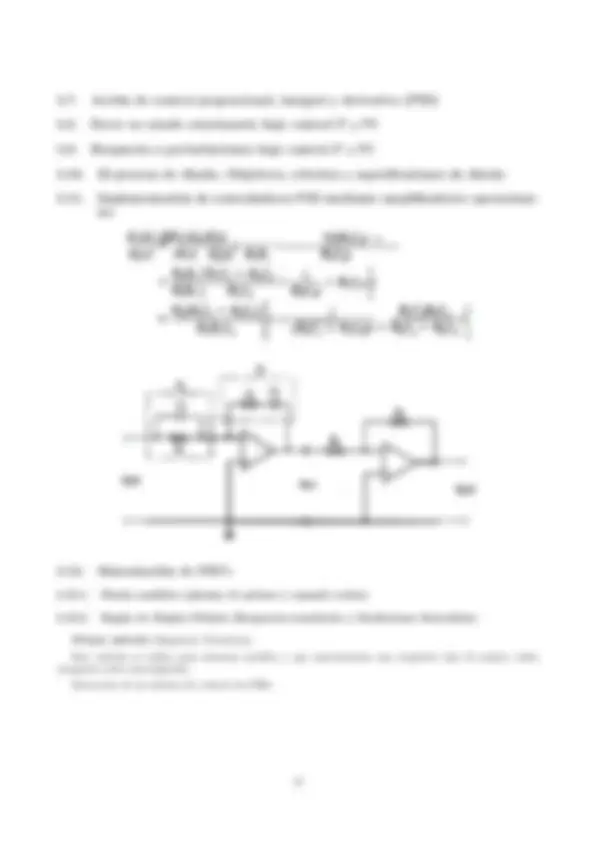
2.9.1. Modelado de sistemas electrónicos
Considere el modelado de circuitos con amplificadores operacionales. Estos dispositivos son utilizados en ingeniería de control para el diseño de controladores analógicos, ya que a partir de ellos se pueden desarrollar controladores como tipo P, PD, PI, PID, redes a atraso-adelanto, etc. La esquema electrónico del dispositivo se muestra en la siguiente figura:
El amplificador operacional (op-amp) ideal las siguientes propiedades:
- El voltaje entre las terminales + y − es cero, esto es, e+^ = e−. Esta propiedad se conoce comúnmente como tierra virtual o corto virtual.
- Las corriente dentro de las terminales + y − es cero. Por lo tanto la impedancia de entrada es infinita.
- La impedancia vista hacia la terminal de salida es cero. Por tanto, la salida es una fuente de voltaje ideal.
- La relación entrada-salida es e 0 = A (e+^ − e−), donde A es la ganancia, la cual tiende al infinito.
Algunas configuraciones básicas:
Amplificador Inversor. Considere el amplificador operacional de la siguiente figura:
A partir de los flujos de corriente en el circuito se puede deducir que
i 1 = ei − e− R 1
, i 2 = e−^ − e 0 R 2
, e+^ = e−^ = 0
y ademas se observa que i 1 = i 2 , por lo que ei R 1
e 0 R 2
o bien
e 0 = −
R 2
R 1
ei.
Amplificador No Inversor. Considere la configuración
De manera general [2]: