¡Descarga En el interior del robot y más Diapositivas en PDF de Robótica solo en Docsity!
ROBÓTICA
UNIDAD 1
Morfología del Robot
En el interior del robot
- Transmisiones y Reductores
- Sistemas de accionamiento
- Sensores
Características básicas
- Debe tener un tamaño y peso reducido;
- Se ha de evitar que presente juegos u holguras
considerables;
- Se deben buscar transmisiones con gran rendimiento.
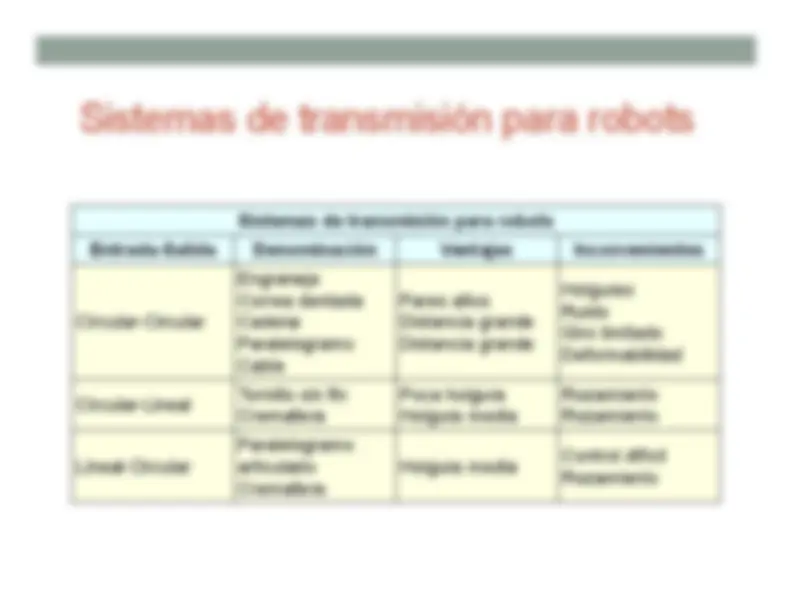
Sistemas de transmisión para robots Sistemas de transmisión para robots Entrada-Salida Denominación Ventajas Inconvenientes Circular-Circular Engranaje Correa dentada Cadena Paralelogramo Cable Pares altos Distancia grande Distancia grande Holguras Ruido Giro limitado Deformabilidad Circular-Lineal Tornillo sin fin Cremallera Poca holgura Holgura media Rozamiento Rozamiento Lineal-Circular Paralelogramo articulado Cremallera Holgura media Control difícil Rozamiento
TRANSMISIONES
- Transmisión por banda y cadena Los accionamientos por banda se utilizan mucho en la robótica, especialmente la banda síncrona. Sin embargo, su vida útil es breve, ya que dependen de la tensión de la banda para producir agarre a través de la polea. Las cadenas, por otro lado, como se muestra en la figura 2b), son por lo general más económicas. Tienen una mayor capacidad de carga y una vida útil más larga en comparación con las transmisiones por banda, aunque menor en comparación con los engranajes.
TRANSMISIONES
- Engranajes Entre todas las transmisiones mecánicas, los diferentes tipos de engranajes, como se muestra en la figura 3, son más confiables y duraderos, aunque un juego entre los dientes tendrá que tomarse en cuenta cuidadosamente durante la fase de diseño.
REDUCTORES
Comparación de sistemas de acción
- Actuadores neumáticos.
- Estos actuadores emplean la energía neumática almacenada por un compresor que la transforma en energía mecánica mediante pistones o turbinas.
- Actuadores hidráulicos.
- Estos actuadores utilizan energía hidráulica proporcionada por un compresor y la transforman en energía mecánica por medio de pistones o turbinas.
- Actuadores eléctricos.
- La fuente principal de energía de entrada es la energía eléctrica que fluye desde el sistema de distribución eléctrico.
Actuadores neumáticos
- Es uno de los dos tipos de dispositivos de potencia dada
por fluidos para robots industriales.
- Los actuadores neumáticos utilizan aire comprimido para
su accionamiento y se usan extensamente para realizar
los movimientos típicos de abrir y cerrar las mordazas en
el sujetador (gripper) de un robot
- Son utilizados, también, para el accionamiento de brazos
de robot sencillos en aplicaciones donde el control
continuo de movimientos no sea una preocupación
Ventajas. Sistema neumático
- Puesto que los sistemas neumáticos son comunes en toda la
industria, el personal que suple a otro está frecuentemente
muy familiarizado con la tecnología.
- Tienen una acción y un tiempo de respuesta muy rápida, lo
que permite ciclos de trabajo expeditos.
- Normalmente no se requiere ninguna transmisión mecánica.
- Un sistema neumático puede ser intrínsecamente seguro en
áreas con peligro de explosión, ya que no se requiere un
control eléctrico.
- En condiciones de humedad, no existe tampoco peligro de
electrocución.
- Los sistemas son por lo regular compactos.
- El control es sencillo, por ejemplo, se usan con frecuencia
topes mecánicos.
- Los componentes individuales pueden interconectarse
fácilmente.
Desventajas. Sistema neumático
- Puesto que el aire es compresible, el control de la precisión en la velocidad y la posición no es fácil de lograr, a menos que se incorporen dispositivos electromecánicos mucho más complejos en el sistema. Esto significa que a menudo sólo está disponible una secuencia limitada que opera con una velocidad fija.
- Si se usan topes mecánicos, la reanudación del sistema puede ser lenta.
- Los sistemas neumáticos no son convenientes para mover cargas pesadas bajo control preciso, debido a la compresibilidad del aire. Esta compresibilidad requiere de la aplicación de más fuerza de la que normalmente sería necesaria para asegurar que el actuador esté firmemente en posición contra su tope en condiciones de carga.
- Si penetra humedad en las unidades y se ha usado metales ferrosos, podrían ocasionarse daños en los componentes individuales.
- La compresibilidad del aire en un actuador neumático no permite un control sofisticado, pero de esto puede sacarse provecho, impidiendo daños debidos a sobrecarga y proporcionando el cumplimiento que puede ser requerido en muchas aplicaciones prácticas.
Ventajas
- Alta eficiencia y alta relación potencia-tamaño.
- Es posible el control completo y preciso de velocidad, posición
y dirección de los actuadores.
- Ocurren pocos problemas de contragolpe debido a la rigidez e
incompresibilidad del fluido, especialmente cuando el actuador
actúa como la propia articulación o unión, que es el caso de
los actuadores rotativos de aspas.
- “Contragolpe” es el término que se usa para describir el juego
no deseado en componentes de transmisión desde su posición
deseada cuando se ponen en condiciones de carga debido al
desgaste o a espacios libres entre superficies.
- Grandes fuerzas pueden aplicarse directamente en las
ubicaciones requeridas.
- Por lo general, tienen una mayor capacidad de carga que los
actuadores eléctricos y neumáticos.
Ventajas
- No se requiere ninguna conexión mecánica, es decir, se
obtiene un accionamiento
- directo con simpleza mecánica.
- Son autolubricantes (bajo desgaste) y no corrosivos.
- Debido a la presencia de un acumulador, el cual actúa
como un dispositivo de “almacenamiento”, el sistema
puede responder a súbitas demandas de potencia.
- Los robots hidráulicos son más capaces de resistir cargas
súbitas que los eléctricos.