


ERROR DE
ESTADO ESTABLE
Equipo 4
Ingeniería de Control


Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Error en estado estable, documento dado por el profesor para estudio de los alumnos en la materia ingeniería de control
Tipo: Guías, Proyectos, Investigaciones
1 / 5

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
La respuesta de un sistema de control se divide en dos partes Es la parte de la respuesta de un sistema que existe cuando se presenta un cambio en la entrada y después de un tiempo determinado desaparece. Es la parte de la respuesta que permanece después de que desparecen todos los cambios transitorios, es decir dejando solo la respuesta continua. Lo que interesa saber es la diferencia entre la señal de entrada y la de salida. Respuesta transitoria^ Respuesta transitoria Respuesta en estado estacionario/estable Respuesta en estado estacionario/estable El ess es el valor del error en el tiempo cuando el tiempo tiende a infinito ante una referencia de
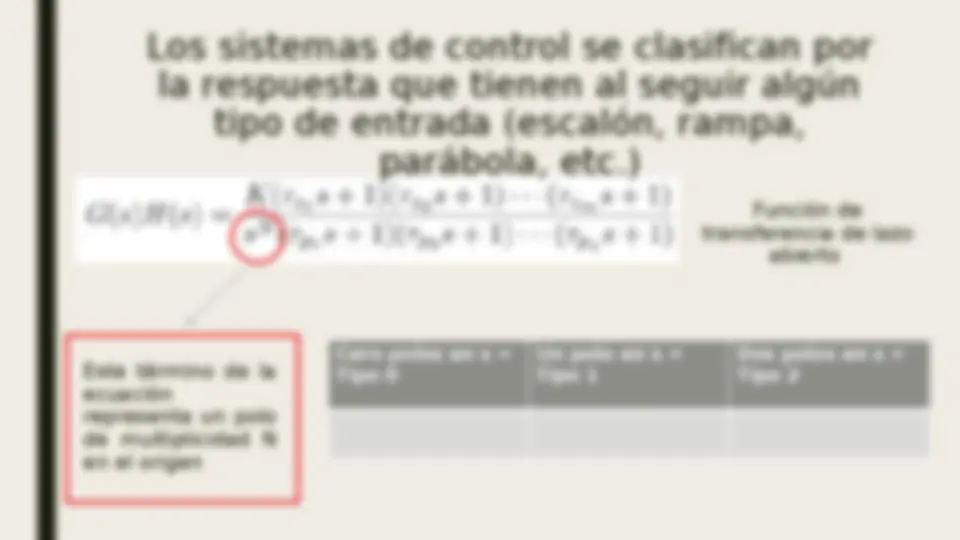
Los sistemas de control se clasifican por la respuesta que tienen al seguir algún tipo de entrada (escalón, rampa, parábola, etc.) Función de transferencia de lazo abierto Este término de la ecuación representa un polo de multiplicidad N en el origen Cero polos en s = Tipo 0 Un polo en s = Tipo 1 Dos polos en s = Tipo 2
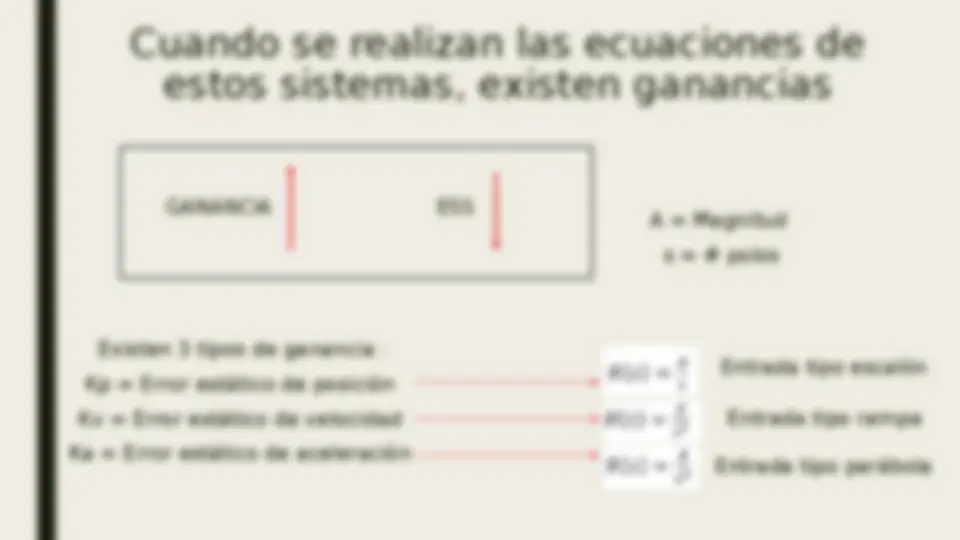
Cuando se realizan las ecuaciones de estos sistemas, existen ganancias GANANCIA ESS Existen 3 tipos de ganancia : Kp = Error estático de posición Kv = Error estático de velocidad Ka = Error estático de aceleración Entrada tipo escalón Entrada tipo rampa Entrada tipo parábola A = Magnitud s = # polos