


*(1(5$/,'$'(6(1(/
(678',2'(/$'2%/(
352<(&&,Ï12572*21$/
&RQHMHUFLFLRVUHVXHOWRV
-25*(/8,6&$/'(5Ï16$/&('2
3URIHVRUGHOD8QLYHUVLGDGGH/RV$QGHV
0pULGD²9HQH]XHOD




























































































Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Libro de apuntes de Sistema Diédrico con ejercicios resueltos
Tipo: Apuntes
1 / 193

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Con Ejercicios Resueltos
Pág.
Con Ejercicios Resueltos
La finalidad de este texto “Generalidades en el estudio de la Doble Proyección Ortogonal. Con Ejercicios Resueltos”, en el cual se desarrolla todo el programa de la asignatura Sistemas de Representación 10, es servir como material de apoyo a los alumnos que cursan el primer semestre en la Facultad de Ingeniería de la Universidad de Los Andes, permitiendo abaratar en alguna medida el costo de la enseñanza al ser publicado en la Internet.
El contenido se encuentra dividido en cinco capítulos y un apéndice. En el primero de los capítulos se hace una breve introducción, en la que se especula acerca del origen y desarrollo de la geometría en el pensamiento y obras del ser humano, para luego iniciar al lector en los conceptos y características fundamentales de los sistemas de representación como medio de expresión de la geometría descriptiva. Seguidamente, se detallan las características del sistema de doble proyección ortogonal, sus elementos constitutivos y las normalizaciones propias del Sistema Internacional, desembocando en el concepto y proyecciones del punto y la recta. En esta sección se incluyen los métodos gráficos indirectos utilizados en la determinación del verdadero tamaño y ángulos de segmentos de recta, así como los casos típicos de su aplicación.
El capítulo número dos está en su totalidad dedicado al plano, sus definiciones y posiciones que adopta en el sistema diédrico, las rectas contenidas en él y los métodos indirectos que permiten la determinación del verdadero tamaño de las figuras planas.
El tercer capítulo contempla el estudio de las diferentes relaciones que se establecen entre los elementos geométricos elementales, enunciando los distintos postulados y aplicándolos en el sistema diédrico. Asimismo, se incluye una serie de problemas métricos y el concepto de lugar geométrico acompañado de distintos ejemplos de aplicación, tan útiles en la formación de una estructura de pensamiento lógico en el estudiante.
Como una síntesis de los temas contemplados en los primeros tres capítulos, el número cuatro corresponde al estudio de los poliedros, su clasificación, características, construcción y doble proyección ortogonal. De acuerdo con el programa de la asignatura, se estudian de manera específica poliedros radiales (prismas y pirámides) rectos de base regular, el tetraedro y el hexaedro o cubo, agregando el resto de los poliedros regulares, no contemplados en el mencionado programa.
El quinto capítulo corresponde a una serie de treinta ejercicios resueltos tipo examen agrupados en cuatro partes – en consonancia con los cuatro capítulos teóricos – y ordenados en orden creciente de dificultad. El apéndice no es más que una breve descripción de los instrumentos empleados en el dibujo técnico, acompañada de pequeñas recomendaciones para su buen uso y de una serie de ejemplos de construcciones geométricas básicas.
Al final se encuentra la bibliografía utilizada durante toda la experiencia del autor, primero como estudiante y luego como docente, que deber ser de obligatoria consulta por parte de los alumnos para ampliar tanto los temas tratados en esta obra como los no expuestos, constituyendo al mismo tiempo un tributo de agradecimiento a esos autores.
Con Ejercicios Resueltos
The purpose of this text “Generalities in the study of the Double Orthogonal Projection. With Solved Exercises”, in which the whole program of the subject Systems of Representation 10 is developed, is to serve as material of support to the students who attend the first semester in the Faculty of Engineering of the University of Los Andes, allowing to reduce in some measurement the cost of the education on having been published in the Internet.
The content is divided in five chapters and an appendix. In the first one of the chapters there is made a brief introduction, in which it is inspected about the origin and development of the geometry in the thought and works of the human being, then initiate the reader in the concepts and fundamental characteristics of the systems of representation as way of expression of the descriptive geometry. Next, details the characteristics of the system of double orthogonal projection, its constitutive elements and the own normalizations of the International System, ending in the concept and projections of the point and the straight line. In this section there are included the graphical indirect methods used in the determination of the real size and angles of segments of straight line, as well as the typical cases of its application.
The chapter number two is dedicated in its entirety to the plane, its definitions and positions that it adopts in the diedric system, the straight lines contained in it and the indirect methods that allow the determination of the real size of the flat figures.
The third chapter contemplates the study of the different relations that are established between the geometric elementary elements, enunciating the different postulates and applying them in the diedric system. Likewise, there is included a series of metric problems and the concept of geometric place accompanied of different examples of application, so useful in the formation of a structure of logical thought in the student.
As a synthesis of the topics contemplated in the first three chapters, the number four corresponds to the study of the polyhedrons, its classification, characteristics, construction and double orthogonal projection. In agreement with the program of the subject, there is a study of radial rigth polyhedrons (prisms and pyramids) with regular base, the tetrahedron and the hexahedron or bucket in a specific way, adding the rest of the regular polyhedrons, not contemplated in the mentioned program.
The fifth chapter corresponds to a series of thirty solved examination-type exercises grouped in four parts - in agreement with four theoretical chapters - and arranged in increasing order of difficulty. The appendix is not any more than a brief description of the instruments used in the technical drawing, accompanied of small recommendations for its good use and of a series of examples of geometric basic constructions.
In the end is the bibliography used during all the experience of the author, first as student and then as teacher, which should be of obligatory consultation on the part of the pupils to extend so much the topics treated in this work as the done not exposed, constituting at the same time a tribute of gratefulness to those authors.
Con Ejercicios Resueltos
A, B, 1, 2 Un Punto Ah^ Proyección del punto A sobre el plano horizontal Av^ Proyección del punto A sobre el plano vertical AR^ Punto A abatido sobre un plano de proyección o sobre uno paralelo a éste A^2 , A^3 Proyección auxiliar del punto A a, b, m, t, w Una recta, una longitud AB, 12, 23 Un segmento de recta a Longitud de arista de un poliedro regular d Diagonal principal de un poliedro, diagonal de un polígono h Altura de un poliedro hc Altura de cara de un poliedro regular I Punto de intersección entre una recta y un plano i Recta de intersección entre dos planos LT Línea de tierra LT2, LT3 Línea de tierra auxiliar O Centro de un poliedro regular, centro de un polígono PH Plano horizontal de proyección PL Plano lateral de proyección PV Plano vertical de proyección r Radio de una circunferencia rc Radio de la esfera circunscrita a un poliedro regular ri Radio de la esfera inscrita en un poliedro regular rt Radio de la esfera tangente a las aristas de un poliedro regular TH Traza en el plano horizontal de una recta TV Traza en el plano vertical de una recta X Abcisa de un elemento geométrico, un punto arbitrario del espacio Y Ordenada o vuelo de un elemento geométrico, un punto arbitrario del espacio Z Cota o Altura de un elemento geométrico Ángulo entre una recta o un plano y el plano horizontal de proyección ! Ángulo entre una recta o un plano y el plano vertical de proyección ", #, $, %, & Un plano "h^ Traza en el plano horizontal del plano " "l^ Traza en el plano lateral del plano " "v^ Traza en el plano vertical del plano " "^2 Traza en un plano auxiliar del plano " ' Ángulo entre dos elementos geométricos (YAB Diferencia de vuelo entre los puntos A y B (ZAB Diferencia de vuelo entre los puntos A y B
Con Ejercicios Resueltos
CAPÍTULO I
1.5.2.1 Recta paralela al plano horizontal 10 1.5.2.2 Recta en posición paralela al Plano Vertical 11 1.5.2.3 Recta en posición oblicua con respecto a los planos de proyección 11
Con Ejercicios Resueltos
mundo griego. Al mismo tiempo, hizo posible la materialización de invenciones como el tornillo sin fin, la rueda dentada y otras maravillas de la ingeniería antigua.
Ahora bien, como se ha indicado, el dibujo constituye también una forma de comunicación, y, como cualquiera otra, debe ser clara y sin ambigüedades, sobre todo cuando el mensaje que se quiere transmitir es la abstracción de un objeto útil cuyas características deben de ser respetadas en el momento de su materialización. Surge entonces la pregunta: si los objetos son tridimensionales, ¿cómo representarlos sobre una superficie bidimensional manteniendo clara la información concerniente a sus propiedades geométricas? La respuesta que se ha dado a tal interrogante es el método de proyecciones.
La proyección de un elemento ( cuerpo proyectante) se obtiene por la incidencia de un haz proyectante sobre él, que al intersecar a una superficie plana determinada genera una representación bidimensional. De las características de ese haz proyectante y de la posición relativa entre él, la superficie de proyección y el objeto, depende el tipo de representación que se obtiene.
Si estudiamos un caso real, el haz de rayos proyectantes puede asociarse a una fuente luminosa (lámpara, luz solar), en tanto que si abordamos el estudio de elementos geométricos abstractos, el mencionado haz viene a ser un conjunto de rectas que pasan por un punto, el cual se denomina origen de proyecciones o Foco. Por otra parte, la superficie de proyección, que en el caso real puede ser cualquiera, se toma como plana en Geometría Descriptiva, mientras que la sombra viene a ser análoga de la proyección del objeto(Fig. 1.1).
PROYECCIÓN (SOMBRA)
CASO REAL
SUPERFICIE DE PROYECCIÓN
RAYOS DE LUZ OBJETO
MANANTIAL LUMINOSO
CASO ABSTRACTO
SUPERFICIE DE PROYECCIÓN
RAYOS PROYECTANTES OBJETO
ORIGEN DE PROYECCIONES
PROYECCIÓN
Fig. 1.1: Proyección de un objeto
El conjunto conformado por el origen de proyecciones, el haz de rayos proyectantes, la superficie de proyección, el cuerpo proyectante y la proyección misma, constituye un Sistema de Proyección que resulta ser finalmente un Sistema de Representación Gráfica. Como todo sistema, es un conjunto de elementos – abstractos en éste caso – que se conjugan de manera ordenada y armónica para lograr la consecución de un fin: la representación bidimensional de una realidad tridimensional que, aunque abstracta, es una aproximación de nuestro entorno cotidiano.
Existe una gama infinita de sistemas de proyección que puede clasificarse en dos grupos principales, a saber, Sistemas Cónicos y Sistemas Cilíndricos. La diferencia entre ambos radica en la posición que se la asigna al origen de proyecciones en cada caso.
Con Ejercicios Resueltos
Sistemas Cónicos: El origen de proyecciones se encuentra en un lugar finito del espacio, lo que trae como consecuencia la convergencia de los rayos proyectantes. Si éstos se asocian con rayos visuales y el origen de proyecciones se asocia con el ojo humano, puede inferirse que con los sistemas cónicos se obtienen representaciones que se aproximan a las imágenes que nuestro cerebro capta de los objetos físicos reales. En realidad estos sistemas generan gráficas análogas a las producidas por cámaras fotográficas, afectadas por deformaciones con respecto a los elementos reales, lo que dificulta la determinación de medidas exactas y la apreciación de las formas planas. Para una mejor comprensión puede hacerse la comparación con un sistema de iluminación artificial en donde la fuente luminosa es una lámpara.
Sistemas Cilíndricos: A diferencia de los cónicos, estos sistemas tienen la particularidad de ubicar el origen de proyecciones en el infinito, es decir, resulta ser un punto impropio. Como consecuencia de ello, los rayos proyectantes forman entre sí un ángulo CERO, es decir, son paralelos pues convergen en el infinito (Fig. 1.2). Es evidente que resulta difícil comparar este tipo de sistema de proyección con alguna forma de visión, sin embargo resulta útil establecer semejanza con un sistema de iluminación natural, en el que la fuente de luz es el sol, dado que este astro se encuentra tan alejado de la tierra y es tan grande con relación a nuestro planeta, que los rayos solares son, en la práctica, paralelos entre sí.
ORIGEN DE PROYECCIONES
RAYOS PROYECTANTES
SUPERFICIE DE PROYECCIÓN
PROYECCIÓN
00
Fig. 1.2: Proyección Cilíndrica
Es evidente que si los rayos proyectantes son paralelos entre sí, cada uno de ellos forma un ángulo μ igual con respecto a la superficie de proyección, lo que implica la existencia de infinitos sistemas de proyección cilíndricos dependiendo del valor que tome μ. En general, se habla de sistemas cilíndricos ortogonales si μ=90° y de sistemas cilíndricos oblicuos si μ 90° (Fig. 1.3).
SISTEMA CILÍNDRICO ORTOGONAL
SUPERFICIE DE PROYECCIÓN
PROYECCIONES
ORIGEN DE
RAYOS PROYECTANTES
SISTEMA CILÍNDRICO OBLICUO
SUPERFICIE DE PROYECCIÓN
PROYECCIÓN
ORIGEN DE PROYECCIONES RAYOS PROYECTANTES
PROYECCIÓN
00 00
Fig. 1.3: Sistemas de Proyección Cilíndricos.
Con Ejercicios Resueltos
Con el fin de facilitar el análisis, y en vista de que el plano coordenado YZ no se ha tomado como un plano de proyección principal, se omite la consideración de la parte negativa del eje X.
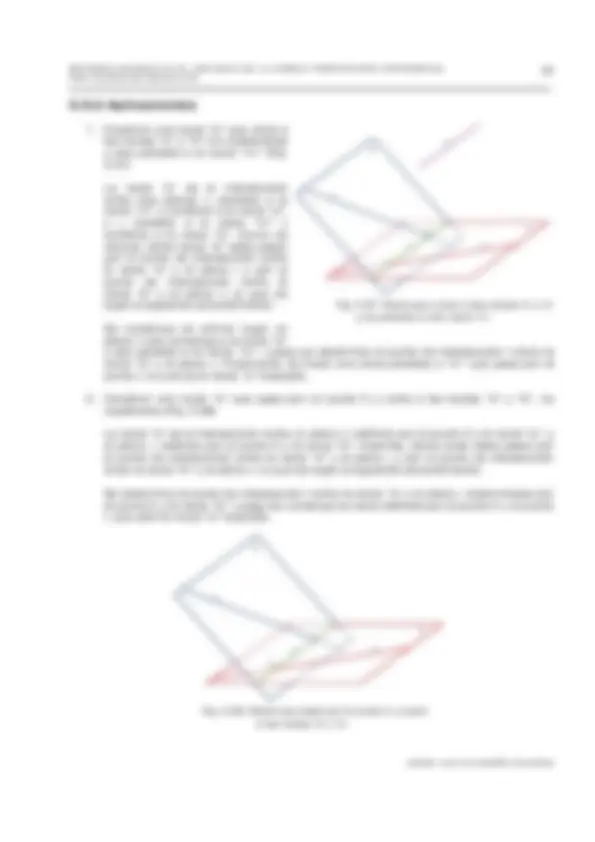
Como en la práctica es necesario dibujar sobre un plano único las proyecciones de una figura, se abate uno de los planos coordenados sobre el otro, haciéndolo girar alrededor de la línea de tierra de modo que se abran los diedros primero y tercero. Se abate uno u otro de los planos de proyección según la posición de la superficie de dibujo, de manera que si ésta es vertical, conviene suponer que el giro de 90° lo realiza PH, en tanto que si es horizontal, se supondrá que es PV quien gira (Fig. 1.5). El giro se realizará, de acuerdo con la norma internacional, haciendo coincidir la parte anterior de PH con la inferior de PV.
+PV = -PH
+PH = -PV
+PH
+PV
-PV
-PH LT^ LT
X
-Y
-Z
+Z
+Y
X
+Z = -Y
-Z = +Y
Fig. 1.5: Abatimiento de los planos de proyección.
El estudio de los sistemas de representación debe ser el de los distintos elementos geométricos, de las relaciones que se establecen entre ellos y sus aplicaciones prácticas. El elemento geométrico fundamental es el punto, el cual es adimensional y puede definirse a través de su posición en el espacio mediante coordenadas, referidas a un sistema que normalmente es rectangular (cartesiano).
El espacio geométrico euclídeo o vulgar está compuesto por una cantidad infinita de puntos; la suma de infinitos elementos adimensionales conforma un todo.
Las dos proyecciones de un punto P del espacio en el sistema Diédrico se obtienen construyendo rayos proyectantes que pasan por el punto y que sean perpendiculares a los planos de proyección. Los puntos comunes a los rayos y a estos planos constituyen las proyecciones diédricas de P. Tales proyecciones se denotan, en este trabajo mediante una letra mayúscula o un número (nombre del punto) con un superíndice que indica el plano de proyección en donde se encuentran. Este superíndice es un letra minúscula: h, si se trata de la proyección sobre el plano vertical y v, si se trata de la proyección sobre el plano horizontal.
Con Ejercicios Resueltos
El punto P y sus proyecciones diédricas determinan un plano, que puede llamarse el plano proyectante del punto P. Este plano es perpendicular a los dos planos de proyección y por lo tanto lo es también a su intersección LT. Las intersecciones PoPv^ y PoPh^ del plano proyectante con PV y PH, son perpendiculares a la línea de tierra y representan las coordenadas z y y del punto P; la distancia del origen de coordenadas a Po constituye la coordenada x; la línea PoPh^ se mantiene perpendicular a la línea de tierra cuando PH gira noventa grados en torno a ella (Fig. 1.6).
Y
-PV
0
-PH LT +PH
+PH = -PV
Ph
0
Z Z
Y Po
+PV
P
LT
h
v P
v P
P
+PV = -PH
Fig. 1.6: Proyecciones diédricas de un punto.
La distancia del punto a PH tiene el valor de su coordenada z y se denomina comúnmente cota, ya que el plano horizontal se asocia con el del terreno. Del mismo modo la distancia del punto a PV corresponde al valor de su coordenada y y recibe el nombre de vuelo o alejamiento. Como luego del giro ambos planos de proyección coinciden, las dos proyecciones del punto P estarán en la dirección PoPv, de manera que: la proyección horizontal y la vertical de un punto, después de efectuar el abatimiento de uno de los planos de proyección sobre el otro, se ubican siempre sobre una línea recta perpendicular a la línea de tierra. De manera recíproca, dos puntos Pv^ y Ph^ del dibujo situados en una línea recta perpendicular a la línea de tierra, se consideran como las proyecciones de un único punto del espacio P. Así, pues, cada punto del espacio está completamente definido mediante sus dos proyecciones diédricas, por ello, cualquier otra proyección que se realice será de carácter auxiliar.
Dependiendo de los valores que adopten las coordenadas rectangulares de un punto del espacio se obtienen siete posiciones características, a saber:
Con Ejercicios Resueltos
posiciones de recta se realiza variando estos ángulos, comenzando por las posiciones notables, que son aquellas situaciones en las que la recta forma con los planos de proyección ángulos notables: cero y noventa grados.
Si un punto del espacio pertenece a una determinada recta, las proyecciones de aquél deben situarse sobre las proyecciones homónimas de ésta.
Sea una recta “m” definida por el segmento AB; los puntos pertenecientes a una recta “m” que se encuentran sobre los planos de proyección se denominan trazas de la recta “m”. En vista de que existen dos planos principales de proyección, se llamará traza horizontal (TH) de la recta al punto común entre ella y PH, y traza vertical (TV) de la recta al punto común entre ella y PV (Fig. 1.8).
Evidentemente, la traza vertical es también el punto de intersección de la recta con su proyección vertical, y como este punto se halla en el plano vertical, tendrá su proyección horizontal en la línea de tierra. Por otra parte, siendo la traza vertical un punto perteneciente a la recta en el espacio, su proyección vertical deberá encontrarse sobre la proyección vertical de “m”; por lo tanto, la proyección horizontal de la traza vertical corresponde al corte entre la proyección horizontal de “m” con la línea de tierra. Análogamente, el corte de la proyección vertical de la recta “m” con la línea de tierra es la proyección vertical de la traza horizontal (punto de PH, Z = 0); la proyección horizontal de ese punto se encuentra sobre la proyección horizontal de la recta “m”.
Ah
TH^ h
Bh
m^ h
h
A^ v^ A m
B
h 0
TV
Ah^ mh
B THv TH h
mv (^) v B
TVv
0 TVh
THv
B^ v
m^ v
TVv A^ v
Fig. 1.8: Trazas de una recta.
Nótese cómo los puntos de traza marcan un cambio de región de la recta “m”. En el ejemplo, a la izquierda de TV “m” se encuentra la segunda región; entre TV y TH, la recta está en la primera región y a la derecha de TH, “m” se sitúa en la cuarta región del espacio.
La recta es un elemento geométrico único que adopta distintas posiciones en el espacio con relación al sistema de referencia, es decir, con respecto a los planos de proyección del
Con Ejercicios Resueltos
sistema diédrico. Se denomina al ángulo que se forma entre la recta y el plano horizontal y ! al formado con el plano vertical.
De acuerdo con los valores que pueden tomar los ángulos y! es posible asignar nombres a las posiciones que adopta la recta. Estas posiciones se denominan notables cuando forma ángulos de cero o noventa grados con respecto a los planos de proyección, vale decir, cuando es paralela o perpendicular a uno de ellos. En el primer caso, un segmento de recta de determinada longitud se proyecta como otro segmento de igual tamaño, en tanto que en el segundo caso, se proyecta como un punto, ya que los rayos proyectantes correspondientes a cada uno de los infinitos puntos de la recta se confunden en uno solo.
El ángulo formado con el plano horizontal ( ) es, obviamente, igual a cero. La intersección de la recta con este plano (TH) es un punto impropio, o lo que es lo mismo, está en el infinito (Fig. 1.9). Dependiendo del valor del ángulo formado por la recta con respecto al plano vertical, se obtienen los siguientes casos:
" Recta de Punta : En esta situación, la recta forma un ángulo con PV! = 90°, por lo que su proyección vertical (av) se reduce a un punto. La proyección horizontal de la recta (ah) es otra recta, la cual es perpendicular a la línea de tierra y se presenta en Verdadero Tamaño, ya que un segmento AB en esta posición se proyecta en AhBh^ con su misma longitud.
" Recta Paralela a la Línea de Tierra : En este caso particular, la recta es paralela a ambos planos de proyección, por lo que! = 0. Se representa en ambas proyecciones como rectas paralelas a la línea de tierra y en Verdadero Tamaño. Ambos puntos de traza (TV y TH) resultan ser puntos impropios.
" Recta Horizontal : La recta en esta posición, es oblicua con respecto a PV, vale decir, 0<!<90º. Como consecuencia, la proyección vertical (cv) es una recta paralela a la línea de tierra cuya longitud es menor con relación a la magnitud de la recta en el espacio (c), en una proporción igual al coseno del ángulo !. La proyección horizontal (ch) refleja el Verdadero Tamaño y es una recta inclinada con respecto a la línea de tierra; el valor de este ángulo es el mismo valor de !.
b: Recta Paralela a la Línea de Tierra
TV =TV
b
c: Recta Horizontal
a: Recta de Punta
b
h a C
ah B^ h
A B
TV^ h h
A
C
A =B =TV =TV=av^ v
v (^) bv D v v
C
v
B
F^ h
D c
D^ h h bh Fh ah h
Ah C
Eh h Dh ch
TV^ h F 0 TV
h
ch
TV E^ h
h
v C bv Dv
E
E^ v cv^
F
A =B =TV =av^ v vv
v (^) v TVv^ E^ v^ cv^ F^ v
Fig. 1.9: Recta en posición paralela al Plano Horizontal
Con Ejercicios Resueltos
estudio, bien mediante la introducción de nuevas proyecciones cilíndricas ortogonales (Fig. 1.11 y 1.12). En general, existen dos casos de recta en posición oblicua, originados por la consideración de un tercer plano de proyección: el plano coordenado XZ o uno paralelo a él.
" Recta de Perfil : En esta posición, la recta forma ángulos distintos de cero y noventa grados con los planos de proyección vertical y horizontal, pero es paralela al plano coordenado XZ (Plano Lateral), por lo que se cumple que
El Verdadero Tamaño de un segmento de recta en esta posición se refleja en una proyección auxiliar, la cual se hace sobre un plano cualquiera paralelo al plano coordenado XZ y, por lo tanto, perpendicular a LT. Como este plano auxiliar se proyecta como líneas rectas en los planos de proyección principales, será necesario abatirlo sobre uno de ellos para lograr “ver” la proyección lateral resultante. El abatimiento se realiza comúnmente en torno a la intersección entre PV y el plano lateral auxiliar mediante un giro de 90°.
El procedimiento para encontrar esa proyección lateral partiendo de las proyecciones diédricas, es el siguiente (Fig. 1.11): Se comienza ubicando a cualquier distancia del origen de coordenadas – preferiblemente a la derecha de las proyecciones de la recta de perfil – un plano lateral, el cual se representa por líneas que forman ángulo recto con la línea de tierra, las cuales se cortan sobre ella en el punto R. Enseguida se trazan por las proyecciones horizontales de los puntos que definen al segmento de recta líneas de referencia paralelas a LT y que cortan a la proyección horizontal del plano lateral auxiliar en 1 y 2.
Luego, con centro en R y radios R 1 y R 2 se dibujan cuartos de circunferencia que definen sobre la línea de tierra a los puntos 1’ y 2’. Si se levantan perpendiculares a LT por 1’ y 2’, y paralelas a LT por las proyecciones verticales de los puntos que definen al segmento de recta, se obtienen, en los cortes correspondientes, las proyecciones laterales abatidas de estos puntos, y, en consecuencia, la proyección lateral abatida de la recta de perfil (Fig. 1.11).
La proyección lateral permite también la determinación de las trazas de la recta: el corte entre la proyección lateral de la recta y la proyección vertical del plano lateral define a TVl^ (proyección lateral de la traza vertical), en tanto que el corte entre al proyección lateral de la recta de perfil y LT define a THl. Una vez obtenidas estas proyecciones laterales se procede a determinar las proyecciones diédricas de los puntos de traza, aplicando el procedimiento descrito anteriormente en forma inversa y recordando los conceptos de los puntos de traza.
Plano Lateral Auxiliar
TH^ h
L^ h^2
TV =TH
K
l
L^ v
v
h h h^ h K g L TH=TH
L
g TH 0
h
K^ v
v K
g^ l Ll
l TV K l
L
g^ h
h 1
v (^) R 1' (^) 2' TH^ l
v
g^ v
L^ l
g^ l
K^ v^ K^ l
TV^ v TVl
LT 0
TV =TH^ h^ v
g
TV=TV
Fig. 1.11: Recta de Perfil.
Con Ejercicios Resueltos
" Recta Oblicua, en Posición Accidental o en Posición Cualquiera : En esta posición, la recta forma ángulos distintos de cero y noventa grados con los tres planos coordenados, es decir, no es paralela a PV, PH ni PL, por lo que el verdadero tamaño de un segmento de recta en estas condiciones no se refleja ni en las proyecciones diédricas ni en la proyección lateral. Por lo anterior se cumple que
ya que los planos de proyección PV y PH forman entre sí 90°. Si se asocia una recta con la trayectoria ideal de un móvil, si se supone ese movimiento de izquierda a derecha, y se considera al observador en la primera región del espacio, puede entonces hablarse de cuatro situaciones generales para la recta en posición accidental: Ascendente hacia adelante (Fig. 1.12-a), Ascendente hacia atrás (Fig. 1.12-b), Descendente hacia adelante (Fig. 1.12-c), Descendente hacia atrás (Fig. 1.12-d).
Como ya se ha indicado, los segmentos de recta en posición oblicua no reflejan en las proyecciones diédricas su Verdadero Tamaño. Lo mismo ocurre con los valores angulares y !. Por tal motivo, es absolutamente necesaria la aplicación de métodos que permitan la resolución de los siguientes tipos de problema: " Dado un segmento en posición oblicua, determinar su Verdadero Tamaño y los valores de y !.
TH =TH R^ h^ S
h kh
R k
k^ v
S
R^ v
TV =TV^ v
h
TV^ h
S^ v TH^ v
h
S^ v
kv
TH^ v^ TV TV^ v S^ h kh
TH^ h
0
R^ h
R^ v
Fig. 1.12-c: Recta Oblicua Descendente hacia delante.
v
TH = TH^ h
T TV^ h l
l h
Th
U^ h
U
U
TV = TV^ v
lv Tv
h TH
U h
l
TH^ v^ TV
h
T^ h
0
TV^ v T^ v v
h
THv
U
l^ v
Fig. 1.12-d: Recta O blicua D escendente hacia atrás.
Q v
P^ h h
TH =TH^ h TH^ h
P
h j P j h TH^ v^ Qh
P^ v TV
j v Q
0 TH^ TV Q j^ h
h
v (^) h
Pv j
TV =TV v
v v Qv TV
Fig. 1.12-a: Recta Oblicua Ascendente hacia delante.
TH^ h
THv
N
TH =TH g h
M TH^ v
TV =TVv
TV^ h h (^) Mh
v
M
g^ v
Nv
g
h
N
TV^ v
TVh 0
g^ h N^ h
M
M^ h
N^ v g^ v v
Fig. 1.12-b: Recta Oblicua Ascendente hacia atrás.