



Universidad Nacional de Avellaneda
20
Taller de Matemática
Arquitectura
Rectas y vectores en el plano
Prof. Lic. Lorena Belfiori








Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
guia para matematicas de vectores
Tipo: Esquemas y mapas conceptuales
1 / 14

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Taller de Matemática
Arquitectura
Rectas y vectores en el plano
Rectas y vectores en el plano
Contenido: Ecuación explícita e implícita de la recta en el plano. Rectas Verticales. Rectas paralelas
y perpendiculares.Vector, operaciones entre vectores del plano, módulo y ángulos directores de un
vector del plano. Ecuación vectorial de la recta.
DEFINICIÓN: Toda ecuación de la forma: 𝑦 = 𝑚𝑥 + 𝑏 describe una relación lineal entre las variables 𝑥 e 𝑦 cuyo
gráfico en el plano es una recta. Una ecuación de la forma: 𝑦 = 𝑚𝑥 + 𝑏 se denomina: Ecuación Explícita de la recta
de pendiente 𝑚 y ordenada al origen 𝑏.
Si asignamos 𝒙 = 𝟎 en la ecuación de la recta 𝒚 = 𝒎𝒙 + 𝒃, sucede que:
Entonces, el punto 𝑷(𝟎; 𝒃)pertenece a la recta. Este punto está en el eje de
ordenadas.
Por lo tanto, la recta interseca al eje de ordenadas en el punto 𝑷(𝟎; 𝒃)y por
esta razón es que 𝒃 se llama ordenada al origen de la recta.
La pendiente 𝒎 de una recta es la
tangente del ángulo 𝜽 que forma la recta
con el eje de abscisas en sentido positivo.
Es decir: 𝒎 = 𝒕𝒈𝜽
Nota: 𝜽se llama ángulo de inclinación
de la recta
Observemos, en la figura,que
considerando dos puntos cualesquiera y
diferentes de una recta no vertical, como
por ejemplo: 𝑷(𝒙 𝟏
𝟏
) y 𝑸(𝒙
𝟐
𝟐
sucede que los ángulos 𝜃 y 𝜃′ son
congruentes.
Entonces: 𝒎 = 𝒕𝒈𝜽 = 𝒕𝒈𝜽′
Por lo tanto, si 𝒎 = 𝒕𝒈𝜽′ entonces:
𝟐
𝟏
𝟐
𝟏
Donde: ∆𝒚 se denomina incremento en 𝒚 y ∆𝒙 se denomina incremento en 𝒙
Nota: ∆ es la letra Delta mayúscula del alfabeto griego. En este caso representa la variación de las coordenadas.
Sean los puntos 𝑷(𝒙 𝟏
𝟏
) y 𝑸(𝒙
𝟐
𝟐
). Si sucede que 𝒙
𝟏
𝟐
, los puntos considerados son de igual abscisa y por lo
tanto ∆𝒙 = 𝟎. Entonces, la pendiente de la recta que pasa por los puntos 𝑷 y 𝑸 no está definida.
DEFINICIÓN: Las rectas que pasa por dos puntos de igual abscisa son rectas verticales y las rectas verticales no
tienen pendiente.Toda ecuación de la forma: 𝑥 = 𝑘es la ecuación explícita de una recta vertical.
En síntesis: Las ecuaciones lineales: 𝑦 = 𝑚𝑥 + 𝑏y 𝑥 = 𝑘son, geométricamente, las ecuaciones de las rectas en el
plano. Se llaman ecuaciones explícitas de la recta en el plano.
A continuación podemos observar ejemplos gráficos de rectas en el plano según la ecuación explícita que la define:
𝒚 = 𝒎𝒙 + 𝒃
𝒙 = 𝒌
𝒎 > 0
𝒎 < 0
𝒎 = 𝟎
∄𝒎
𝒃
𝒃
𝒃
𝑥 𝑥 𝑥 𝒌
𝑥
𝑦 𝑦 𝑦
𝑦
𝒓𝒆𝒄𝒕𝒂 𝒄𝒓𝒆𝒄𝒊𝒆𝒏𝒕𝒆
𝒓𝒆𝒄𝒕𝒂 𝒅𝒆𝒄𝒓𝒆𝒄𝒊𝒆𝒏𝒕𝒆
𝒓𝒆𝒄𝒕𝒂 𝒉𝒐𝒓𝒊𝒛𝒐𝒏𝒕𝒂𝒍
𝒓𝒆𝒄𝒕𝒂 𝒗𝒆𝒓𝒕𝒊𝒄𝒂𝒍
P
Q
y 2
x x 2 1
y
1
x
y
𝑦
𝑥
𝑷(𝟎; 𝒃)
Rectas y vectores en el plano
Sean las rectas: 𝑟 ଵ
ଵ
ଵ
y 𝑟
ଶ
ଶ
ଶ
, las rectas 𝒓
𝟏
y 𝒓
𝟐
son paralelas si tienen la misma pendiente,
es decir: 𝑟 ଵ
ଶ
ଵ
ଶ
o bien ambas son rectas verticales.
Sean las rectas: 𝑟 ଵ
ଵ
ଵ
y 𝑟
ଶ
ଶ
ଶ
, las rectas 𝒓
𝟏
y 𝒓
𝟐
son perpendiculares si el producto entre sus
pendientes es −1, es decir: 𝑟 ଵ
ଶ
ଵ
ଶ
= −1 o bien si una de ellas es una recta vertical y la otra es una recta
horizontal.
Toda ecuación lineal de la forma 𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0, donde 𝐴 y 𝐵 no son simultáneamente cero, se denomina
ecuación implícita o general de la recta en el plano.
La ecuación implícita𝑨𝒙 + 𝑩𝒚 + 𝑪 = 𝟎sintetiza las ecuaciones explícitas de la recta en el plano, ya que:
𝐴𝑥 + 𝐵𝑦 + 𝐶 = 0 (con 𝐴, 𝐵 y 𝐶 no nulos) equivale a la ecuación explícita de una recta 𝑦 = 𝑚𝑥 + 𝑏
𝐴𝑥 + 𝐵𝑦 = 0 (con 𝐴 y 𝐵 no nulos y 𝐶 = 0) equivale a la ecuación explícita de una recta que pasa por el
origen de coordenadas: 𝑦 = 𝑚𝑥
𝐵𝑦 + 𝐶 = 0 (con 𝐴 = 0 y 𝐵 ≠ 0) equivale a la ecuación explícita de una recta horizontal: 𝑦 = 𝑏
𝐴𝑥 + 𝐶 = 0 (con 𝐴 ≠ 0 y 𝐵 = 0) equivale a la ecuación explícita de una recta vertical: 𝑥 = 𝑘
Se llaman magnitudes escalares aquellas que se caracterizan mediante un número real con una unidad apropiada de
medida.
Se llaman magnitudes vectoriales aquellas que se caracterizan por su magnitud, su dirección y su sentido.
Un segmento de recta queda determinado por sus puntos extremos, si estos puntos están dados en cierto orden se dice
que el segmento está orientado y a este segmento orientado se lo denomina vector.
Dos vectores son equipolentes cuando tienen el mismo módulo, el mismo sentido y la misma dirección o sus rectas de
acción son paralelas.
En la figura 1, representamos geométricamente a un vector: 𝐴𝐵
La dirección o recta de acción está dada por la recta r.
Al decir: “con origen en A y extremo en B” estamos fijando un
sentido.
La longitud desde el origen A hasta el extremo B es el módulo del
vector, que simbolizamos:ฮ𝐴𝐵
Figura 1
Nota 1: El módulo de un vector desde el punto de vista geométrico es la longitud del segmento orientado que lo
define. Desde, el punto de vista físico, el módulo es la intensidad o magnitud propia del vector.
Nota 2: En particular, si el módulo de un vector es 1, se lo denomina vector unitario o versor. Se simboliza: 𝑣ු
Para ubicar, puntos en el plano, utilizamos un sistema de referencia
cartesiano: Oxy. En él cada punto 𝑃(𝑥; 𝑦) queda identificado por un par
Luego, todo punto 𝑃
) tiene asociado un vector posición, que se
simboliza 𝑂𝑃
, cuyo origen es el origen de coordenadas O y cuyo extremo es
el punto 𝑃
. La expresión analítica o por componentes del vector posición del
punto P
0
coincide con las coordenadas del punto P
0
. Es decir: 𝑂𝑃
Por otra parte, en función, de las características de dirección y sentido de nuestro sistema de referencia, todo vector del
plano puede definirse como la suma de dos vectores unitarios o versores canónicos: 𝚤̌ = (1; 0) para el eje de abscisas
y 𝚥̌ = (0; 1) para el eje de ordenadas. Cada versor canónico es representante de la dirección de cada uno de los ejes
coordenados y su sentido es el sentido positivo del eje de abscisas y de ordenadas, respectivamente. En consecuencia,
todo vector del plano puede expresarse en función de ellos. Veamos como:
Sean los puntos 𝑃
ଵ
(𝑥; 0) y 𝑃
ଶ
(0; 𝑦). El punto 𝑃
ଵ
(𝑥; 0) tiene asociado al
vector posición 𝑂𝑃
ଵ
que es un múltiplo escalar del versor 𝚤̌, esto es:
ଵ
= 𝑥𝚤̌ y el 𝑃
ଶ
(0; 𝑦) tiene asociado al vector posición 𝑂𝑃
ଶ
que es un
múltiplo escalar del versor 𝚥̌, esto es: 𝑂𝑃
ଶ
Luego, por definición de suma de vectores:𝑶𝑷
𝟏
𝟐
Donde 𝑶𝑷
el vector posición del punto 𝑃(𝑥; 𝑦). La expresión canónica del
vector posición del punto 𝑃(𝑥; 𝑦) es:
Rectas y vectores en el plano
v
𝟏
𝟐
Sean los vectores: 𝑣ሬሬሬ⃗ = (𝑣 ଵ
ଶ
)y 𝑢ሬሬሬ⃗ = (𝑢
ଵ
ଶ
), dos vectores del plano expresados según sus componentes: 𝑣ሬሬሬ⃗ = 𝑢ሬሬሬ⃗ ⇔
ଵ
ଶ
ଵ
ଶ
ଵ
ଵ
ଶ
ଶ
Sean 𝑣ሬሬሬ⃗ y 𝑢ሬሬሬ⃗ dos vectores cualesquiera, entonces el vector 𝑣ሬሬሬ⃗ + 𝑢ሬሬሬ⃗ , suma de 𝑣ሬሬሬ⃗ y 𝑢ሬሬሬ⃗ se obtiene analíticamente
haciendo 𝑣⃗+ 𝑢ሬ⃗ = (𝑣 ଵ
ଶ
ଵ
ଶ
ଵ
ଵ
ଶ
ଶ
), 𝑦 gráficamente, aplicando la regla del paralelogramo.
Regla del paralelogramo:
Se considera un punto de aplicación O, con origen en este punto se representa al vector 𝑣ሬሬሬ⃗ y al vector 𝑢ሬሬሬ⃗. Se traza una
recta paralela a la dirección del vector 𝑢ሬሬሬ⃗ en el extremo del vector 𝑣ሬሬሬ⃗ y en el extremo del vector 𝑢ሬሬሬ⃗ se traza una recta
paralela a la dirección del vector 𝑣ሬሬሬ⃗. Estas rectas se cortarán en un punto P, formando un paralelogramo. Luego, el
vector suma 𝑣ሬሬሬ⃗ + 𝑢ሬሬሬ⃗ se obtiene uniendo el punto de aplicación O con el punto P. (Ver figura 2)
Figura 2
Propiedades de la suma de vectores:
Ley de composición interna: La suma de dos vectores es un vector: 𝑤ሬሬ⃗ = 𝑣ሬሬሬ⃗ + 𝑢ሬሬሬ⃗
La suma de vectores es conmutativa: 𝑣ሬሬሬ⃗ + 𝑢ሬሬሬ⃗ = 𝑢ሬሬሬ⃗ + 𝑣ሬሬሬ⃗
La suma de vectores es asociativa: 𝑣ሬሬሬ⃗ + (𝑢ሬ⃗ + 𝑤ሬሬ⃗ ) = (𝑣ሬሬሬ⃗ + 𝑢ሬሬሬ⃗ ) + 𝑤ሬሬ⃗
Existencia de elemento neutro: Existe un vector denominado vector nulo, que se simboliza: 0
tal que para
cualquier vector 𝑣ሬሬሬ⃗ se cumple que 𝑣ሬሬሬ⃗ + 0
vectores.
Sean 𝑣ሬሬሬ⃗ y 𝑢ሬሬሬ⃗ dos vectores cualesquiera, entonces el vector 𝑣ሬሬሬ⃗ − 𝑢ሬሬሬ⃗ , resta de 𝑣ሬሬሬ⃗ y 𝑢ሬሬሬ⃗ se obtiene por sumar al vector 𝑣ሬሬሬ⃗
el vector opuesto del vector 𝑢ሬሬሬ⃗. En símbolos: 𝑣ሬሬሬ⃗ − 𝑢ሬሬሬ⃗ = 𝑣ሬሬሬ⃗ + (−𝑢ሬሬሬ⃗ )
Analíticamente, 𝑣⃗− 𝑢ሬ⃗ = (𝑣 ଵ
ଶ
ଵ
ଶ
ଵ
ଶ
ଵ
ଶ
ଵ
ଵ
ଶ
ଶ
Para hallar gráficamente el vector diferencia 𝑣ሬሬሬ⃗ − 𝑢ሬሬሬ⃗ , consideramos un punto origen O y graficamos, al vector 𝑣ሬሬሬ⃗.
Luego, en el punto extremo de este vector dibujamos el vector opuesto de 𝑢ሬሬሬ⃗. El vector diferencia 𝑣ሬሬሬ⃗ − 𝑢ሬሬሬ⃗ es el que se
obtiene uniendo el punto inicial de 𝑣ሬሬሬ⃗ con el punto extremo del vector opuesto de 𝑢ሬሬሬ⃗.
Sea 𝑣ሬሬሬ⃗ un vector y 𝜆 un número real, entonces el producto del vector 𝑣ሬሬሬ⃗ por el escalar 𝜆, que se simboliza 𝜆𝑣ሬሬሬ⃗ , es un
vector.
El módulo y el sentido del vector 𝜆𝑣ሬሬሬ⃗ pueden variar respecto del módulo y sentido del vector 𝑣ሬሬሬ⃗ según sea el valor real
que se adopte para el escalar 𝜆. No obstante, siempre 𝑣ሬሬሬ⃗ y 𝜆𝑣ሬሬሬ⃗ tienen la misma dirección, son paralelos.
Rectas y vectores en el plano
El versor asociado 𝑣෭ a un vector 𝑣ሬሬሬ⃗ ≠ 0
posee las siguientes características: tiene la misma dirección y sentido del
vector 𝑣ሬሬሬ⃗ y su módulo es 1. En consecuencia, el versor asociado
es decir: 𝑣෭ = 𝜆𝑣ሬሬሬ⃗ siendo 𝜆 > 0. Se demuestra que:
Es decir, sea el vector 𝑣ሬሬሬ⃗ ≠ 0
, entonces 𝑣෭ =
DEFINICIÓN: Dos vectores no nulos son paralelos si y sólo si uno es múltiplo escalar del otro. En símbolos:
a) Los vectores 𝒖ሬሬሬ⃗ = (𝟐; −𝟑) y 𝒗ሬሬሬ⃗ = (−
b) Determinar el o los vectores paralelos al vector
Solución:
Buscamos vectores 𝑣ሬሬሬ⃗ tales que: 𝑣ሬሬሬ⃗ //
Entonces, si 𝑣ሬሬሬ⃗ // 𝑢ሬሬሬ⃗ sucede que: 𝑣ሬሬሬ⃗
Es decir: 𝑣ሬሬሬ⃗ = 𝑘
Luego, como ‖𝑣ሬሬሬ⃗ ‖ = √
26 se tiene que:
Entonces:
ଶ
ଶ
Por lo tanto, los vectores paralelos al vector
El resultado del producto escalar entre dos vectores es un número.
Para calcularlo existen dos formas posibles:
Una forma es utilizando sus coordenadas cartesianas:
Y la otra es considerando los módulos de cada vector y e
Considerando ambas formas de obtener el producto escalar entre dos vectores
igualamos ambas fórmulas y despejamos el ángulo entre ellos:
௫
௫
௬
௬
௫
௫
௬
௬
𝒖 𝒙
.𝒗 𝒙
ା𝒖 𝒚
.𝒗 𝒚
‖ 𝒖
ሬሬ⃗ ‖ .
‖ 𝒗
ሬሬ⃗ ‖
Si los vectores son PERPENDICULARES,
ángulo de 90° entre sí y cos 90°=0 lo que anula el producto.
Dados los vectores 𝒖
y 𝒗
Para calcular el producto escalar haremos uso de las
y
x
O
ଵ
ଶ
posee las siguientes características: tiene la misma dirección y sentido del
y su módulo es 1. En consecuencia, el versor asociado 𝑣෭ a un vector 𝑣ሬሬሬ⃗ es un múltiplo escalar del vector
Se demuestra que: 𝜆 =
ଵ
‖௩ሬሬሬ⃗ ‖
ଵ
‖ ௩ሬሬሬ⃗
‖
Dos vectores no nulos son paralelos si y sólo si uno es múltiplo escalar del otro. En símbolos:
(−𝟔; 𝟗)son paralelos, ya que: 𝒗ሬሬሬ⃗ = −𝟑𝒖ሬሬሬ⃗
Determinar el o los vectores paralelos al vector 𝒖ሬሬሬ⃗ = (𝟐; −𝟑) tal que tengan módulo √𝟐𝟔
// 𝑢ሬሬሬ⃗ y ‖𝑣ሬሬሬ⃗ ‖ = √
se tiene que: ‖(2𝑘; −3𝑘)‖ = √
ଶ
los vectores paralelos al vector 𝑢ሬሬሬ⃗ = (2; −3) de módulo √
26 son: 𝑣ሬሬሬ⃗
El resultado del producto escalar entre dos vectores es un número.
Para calcularlo existen dos formas posibles:
Una forma es utilizando sus coordenadas cartesianas: 𝑢ሬ⃗. 𝑣⃗= 𝑢
௫
௫
௬
௬
Y la otra es considerando los módulos de cada vector y el ángulo que forman:
𝜃 𝑒𝑠 𝑒𝑙 á𝑛𝑔𝑢𝑙𝑜 𝑒𝑛𝑡𝑟𝑒 𝑎𝑚𝑏𝑜𝑠 𝑣𝑒𝑐𝑡𝑜𝑟𝑒𝑠
Considerando ambas formas de obtener el producto escalar entre dos vectores, armamos un sistema de ecuaciones
igualamos ambas fórmulas y despejamos el ángulo entre ellos:
PERPENDICULARES, entonces el producto escalar es 0 porque forman un
ángulo de 90° entre sí y cos 90°=0 lo que anula el producto.
, hallar su producto escalar y el ángulo que forman entre ellos.
Para calcular el producto escalar haremos uso de las coordenadas de los vectores:
posee las siguientes características: tiene la misma dirección y sentido del
es un múltiplo escalar del vector 𝑣ሬሬሬ⃗ ,
Dos vectores no nulos son paralelos si y sólo si uno es múltiplo escalar del otro. En símbolos:
⃗ = √ 2 (2; −3) y 𝑣 ′
, armamos un sistema de ecuaciones,
ar es 0 porque forman un
su producto escalar y el ángulo que forman entre ellos.
Rectas y vectores en el plano
Para hallar el ángulo entre ambos vectores primero se debe calcular los módulos de cada uno de ellos:
ଶ
ଶ
ଶ
ଶ
Luego,
𝜃 = 𝑎𝑟𝑐 cos ൬
𝜃 = 𝑎𝑟𝑐 cos(−0,98562225481)
En la figura se muestra que la dirección de un vector del plano y el sentido positivo de cada uno de los ejes
coordenados determinan ángulos. Estos ángulos se denominan ángulos directores del vector.
Los ángulos 𝛼 y 𝛽 son los ángulos directores del vector 𝑣ሬሬሬ⃗ = (𝑣
ଵ
ଶ
) respecto del eje x y del eje y respectivamente.
Los ángulos se miden desde el vector hacia el semieje positivo: 0 ≤ 𝛼 ≤ 180°; 0 ≤ 𝛽 ≤ 180°
Observando la figura, se deduce por la definición del coseno de un ángulo que:
௩
భ
‖ ௩ሬሬሬ⃗
‖
y 𝑐𝑜𝑠 𝛽 =
௩
మ
‖ ௩ሬሬሬ⃗
‖
Por lo tanto, 𝛼 = 𝑎𝑟𝑐𝑐𝑜𝑠 ቀ
௩
భ
‖௩ሬሬሬ⃗ ‖
ቁ y 𝛽 = 𝑎𝑟𝑐𝑐𝑜𝑠 ቀ
௩
మ
‖௩ሬሬሬ⃗ ‖
Nota: Los valores numéricos 𝑐𝑜𝑠 𝛼 y 𝑐𝑜𝑠 𝛽 se denominan cosenos directores del vector 𝑣ሬሬሬ⃗.
Conocer los cosenos directores de un vector y el módulo del mismo, aportan otra manera de definir las coordenadas de
un vector. Este hecho es muy utilizado en Física, para definir vectores, como se muestra en el siguiente caso:
Un barco navega a una velocidad de 𝟐𝟐, 𝟓
𝒌𝒎
𝒉
con rumbo 40º. Exprese la velocidad del barco como vector.
Nota: El rumbo de una embarcación se mide desde el cardinal norte en el sentido horario
Solución:
Queremos determinar las coordenadas del vector velocidad 𝑣ሬሬሬ⃗ ,
según los datos, conocemos su módulo:
= 22 , 5 y el ángulo
director respecto del eje y (sentido norte): 𝛽 = 40° al considerar un
sistema de referencia local, tal como se muestra en la figura 9.
Entonces, el otro ángulo director del vector velocidad es: 𝛼 = 50°
Por definición de cosenos directores de un vector resulta que:
௩
భ
ଶଶ,ହ
y 𝑐𝑜𝑠 40° =
௩
మ
ଶଶ,ହ
Entonces:
ଵ
= 22,5 𝑐𝑜𝑠 50° ≅ 14,5 y 𝑣
ଶ
Por lo tanto, el vector velocidad es: 𝑣ሬሬሬ⃗ = ( 14 , 5 ; 17 , 2 )
=40º
v
2
1
O
V 2
V 1
Rectas y vectores en el plano
La distancia de un punto a una recta es la distancia
más corta entre ese punto y un punto de una línea o recta.
Sean A (A x
y
) un punto y D una recta de la forma
ax+by+c=0.
Se define la distancia entre el punto A y y la recta
D como la distancia mínima entre A y un punto A´ de la
recta tal que 𝐴𝐴´
es perpendicular a la recta D.
ଶ
ଶ
EJEMPLO: La distancia entre la recta 3x+4y-6=0 y el punto M(-1; 3) es 0,6 ya que 𝑑 =
|ଷ.(ିଵ )ାସ.(ଷ)ି |
√ଷ
మ
ାସ
మ
|ଷ|
√ଶହ
ଷ
ହ
realizado por el arquitecto: Andrew Burns en Niigata, Japón. Como no se conocen las dimensiones reales del
diseño, se plantean datos con fines educativos
Consideramos un sistema de coordenadas rectangulares con origen en el vértice 𝐴 del terreno y sobre él los
puntos 𝑀(14; 4) y 𝐵(16; 22) cuyas coordenadas están en centímetros según la escala numérica 𝐸 = 1: 75
Se pide:
a) ¿La pendiente de la recta que pasa por 𝐴 y por 𝐵 en el plano según la escala y en la realidad son iguales? ¿Por
qué?
b) Obtener la ecuación de la recta que incluye al segmento 𝑄𝑀
y es paralela a la recta que incluye al segmento
c) Hallar la longitud real del segmento 𝑄𝑀
, sabiendo que la recta que incluye al segmento 𝑄𝑀
es paralela a la
recta que incluye al segmento 𝐴𝐵
d) Determinar el área del terreno, en la realidad, sabiendo que los segmentos 𝐴𝐵
y 𝐵𝐶
son perpendiculares.
x; x 2 5 ; y
2 x 3 y; 6 y 4 x 0 0;
4 x 3 y; 3 12 x 0 ; 9 y
Determinar si las siguientes proposiciones son verdaderas o falsas
Los puntos del plano 𝑃(0; −1) y 𝑄(5; 3) definen al vector 𝑃𝑄
= (6; −3) entonces 𝑄(6; −4)
= (−9; 13) entonces 𝑃(7; −6)
ଶ
ଷ
actúan sobre un punto del plano, la fuerza neta (o resultante) es: 𝐹
ଵ
ଶ
ଷ
Si 𝐹
se dice que las fuerzas están en equilibrio
Resolver:
a) Sobre un punto del plano actúan las fuerzas representadas por los siguientes vectores:
ଵ
ଶ
ଷ
= (−1; 4) y 𝐹
ସ
Rectas y vectores en el plano
Verificar si tales fuerzas están en equilibrio.
b) Sobre un punto del plano actúan las fuerzas representadas por los siguientes vectores:
ଵ
ଶ
ଷ
= (−5; −1) y 𝐹
ସ
Determinar una fuerza 𝐹
ହ
de modo que las cinco fuerzas estén en equilibrio.
cumple con las condiciones que se enuncian. Realizar un gráfico de la recta en cada caso.
a) Pasa por el origen de coordenadas y por el punto D(5;3)
b) Es paralela al eje de ordenadas y pasa por el punto B(–7;1)
c) Pasa por el punto A(–10;2) y es una recta horizontal
d) Pasa por el punto A(4;3) y es una recta vertical
e) Pasa por el origen de coordenadas y su ángulo de inclinación es: 𝜃 = 30°
f) Su ordenada al origen es 4 y su ángulo de inclinación es: 𝜃 = 120°
g) Pasa por el punto A(–4;3) y es paralela a la recta 6 𝑥 − 2𝑦 + 4 = 0
h) Pasa por el punto A(2;–4) y es perpendicular a la recta 4 𝑥 + 8𝑦 − 6 = 0
medicamentos reductores del colesterol. El mercado en América Latina, en miles de millones de dólares, de
tales medicamentos de 1999 a 2004 se describió aproximadamente por la fórmula lineal: 𝑴(𝒕) = 𝟏, 𝟗𝟓𝒕 +
𝟏𝟐, 𝟏𝟗 donde 𝒕 está en años, siendo 𝒕 = 𝟎 el año 1999.
a) Realizar la gráfica que muestre el mejoramiento del mercado de los medicamentos reductores del colesterol
entre 1999 a 2004
b) Suponer que la proyección se mantiene y la tendencia continua, ¿cuál será el mercado de los medicamentos
reductores del colesterol en el año 2015?
c) ¿Cuál fue el cociente incremental del mercado de los medicamentos reductores del colesterol durante el
periodo 1999-2004?
cierta especie y la temperatura. Cuando la temperatura es de 70°F, los grillos cantan a razón de 120 sonidos
por minuto, y cuando es de 80°F, lo hacen a 160 sonidos por minuto.
a) Encontrar una ecuación lineal que establezca la relación entre la temperatura F y el número N de sonidos por
minutos de los grillos.
b) ¿Cuál es el número de sonidos por minuto que emiten los grillos si la temperatura es de 120°F?
−12𝑡 + 88 con 0 ≤ 𝑡 ≤ 3 donde 𝑦 está en millones y 𝑡 = 0 corresponde al inicio de 2001. La ecuación
𝑦 = 18𝑡 + 13,4 con 0 ≤ 𝑡 ≤ 3 da el número aproximado en millones de pantallas de cristal líquido (LCD) de
los embarques globales durante el mismo periodo. ¿Cuándo los envíos globales de LCD superaron por
primera vez los embarques globales de CRT?
6.. Resolver gráfica y analíticamente:
que sea solución de las siguientes ecuaciones:
3 ; 6 3 ; 54
2 6 ; 8
ฮ = √ 5 si
A 1 ;k 2) ฮ𝑂𝐴
ฮ = 1 siendo:
A 1 1; y
B k ;k
2)𝑤ሬሬ⃗ = (5; 7) y 𝑚ሬሬ⃗ = (−15; −21) 4) 𝑤ሬሬ⃗ = (5; 3) y 𝑚ሬሬ⃗ = (10; 9)
al vector 𝑚ሬሬ⃗ = (2; 6)
a) Hallar la intensidad y los ángulos directores de las siguientes fuerzas:
Rectas y vectores en el plano
ଵ
ଶ √
ଵ
(2; 6) y 𝑚෭
ᇱ
ଵ
ଶ √
ଵ
ฮ = 5, 𝛼 = arccos
ଷ
ହ
, 𝛽 = arccos ቀ−
ସ
ହ
b)
= (3 cos 30° ; 3 cos 60°) = ቀ
ଷ√ଷ
ଶ
ଷ
ଶ
= (cos 120° ; cos 30°) = ቀ−
ଵ
ଶ
√ଷ
ଶ
= (6 cos 0° ; 6 cos 90°) = (6; 0)
Actividades obligatorias de la clase:
a) Graficar la recta de ecuación 𝑦 =
ଷ
ଶ
𝑥 − 1. ¿El punto (2;-4) pertenece a la recta? Indicar su ecuación implícita.
b) Encontrar el valor real del parámetro k de forma que la recta:
1
r : kx 3 5 y k 2 0 pase por el punto A(–1 ;4).
2
r : 4 x ky 7 0 tenga pendiente 2
3
r : kx y 3 k 6 tenga abscisa al origen 5
c) Según los datos del gráfico, hallar una ecuación explícita de la recta 𝑟 y una ecuación implícita de la recta
d) Dado los puntos B(3;-2), D(-1;5), E(0;-3) y F(-6;4):
Calcular el módulo y los cosenos directores de cada uno de los vectores anteriores.
Operar analíticamente: 𝐵𝐷
e) En un sistema de coordenadas cartesianas se pide graficar el vector con origen en el punto A(5;-1), módulo 3
que forma un ángulo de 30° con la horizontal. ¿Cuál es el punto de su extremo? ¿es único?
f) Hallar la ecuación vectorial de la recta que contiene al punto C(2;-4) cuya dirección es paralela al vector
encontrado en el punto anterior. Expresar esa recta también en forma implícita.
𝑥
𝑦
−
3
2
5
5
2
𝑠
𝑟
2
1
Rectas y vectores en el plano
se escribe mediante
despejando y
igualando a 0
en su forma
se determina por
tiene
operaciones
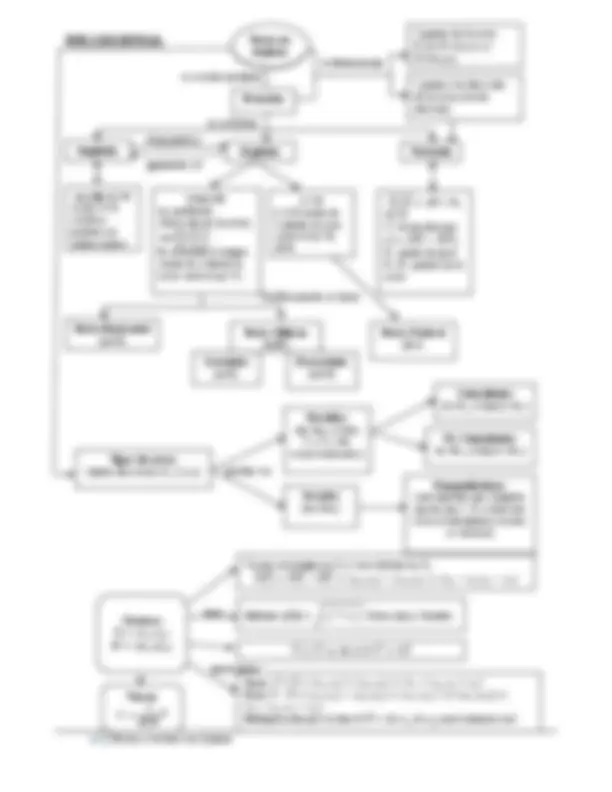
RED CONCEPTUAL Recta en
el plano
Implícita Explícita Vectorial
Ecuación
Ax+By+C=
(A,B no
pueden ser
ambos nulos)
𝟏
λЄ R
𝑣⃗ : vector director
2
1
1
: punto de paso
1
2
: puntos de la
recta
y=mx+b
m: pendiente
(dirección de la recta)
∆𝐲
∆𝐱
𝒚 2
ି 𝒚 1
𝒙 2 ି 𝒙 1
b: ordenada al origen
(valor de y donde la
recta corta al eje Y)
x = k
k Є R (valor de
x donde la recta
corta al eje X)
Recta Vertical
Recta Horizontal
(m=0)
Recta Oblicua
(m≠0)
Creciente(
m>0)
Decreciente
(m<0)
Tipos de rectas
(dadas dos rectas (L
1
y L
2
Paralelas
(m 1
=m 2
; o bien
1
y L
2
son
rectas verticales)
Secantes
(m
1
≠m
2
Coincidentes
(b
1
=b
2
; o bien k
1
=k
2
No Coincidentes
(b 1
≠b 2
; o bien k 1
≠k 2
Perpendiculares
(son aquellas que cumplen
que m
1
.m
2
= -1; o bien una
recta es horizontal y la otra
es vertical)
2 puntos de la recta:
1
2
1
=(x
1
;y
1
) y
2
=(x
2
;y
2
1 punto y la dirección
de la recta (vector
director)
𝒙
𝒚
𝒙
𝒚
Vectores
Módulo: ‖𝑣⃗ ‖ = ට𝑣
௫
ଶ
௬
ଶ
; Dirección y Sentido
Suma: 𝑣⃗ + 𝑢ሬ⃗ =
ଵ
ଶ
ଵ
ଶ
ଵ
ଵ
ଶ
ଶ
Resta:𝑣⃗ − 𝑢ሬ⃗ = (𝑣
ଵ
ଶ
ଵ
ଶ
ଵ
ଶ
ଵ
ଶ
ଵ
ଵ
ଶ
ଶ
Multiplicación por escalar:𝒌. 𝒗ሬሬ⃗ = (𝒌. 𝒗
𝒙
𝒚
)con k:número real
ଵ
ଶ
ଶ
ଵ
ଶ
ଶ
ଵ
ଵ
ଶ
ଵ
ଶ
ଵ
Vector con origen en 𝑃
ଵ
y con extremo en 𝑃
ଶ
Versor