



INGENIERÍA DE CONTROL
Azucena Gonzalez Javier
NUA: 145869
Fecha: 08 de mayo de 2022
Seminario de Proyecto de Titulación
Profesor: M.I Martínez Martínez Ricardo
DIVISIÓN DE INGENIERÍAS CAMPUS IRAPUATO-SALAMANCA






Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Este documento ofrece una reseña histórica y conceptual de la ingeniería de control, desde su primera aparición en el regulador de velocidad de James Watt hasta el control robusto actual. La ingeniería de control es una rama de la ingeniería que utiliza sistemas tecnológicos para brindar control a las maquinarias y procesos industriales. A lo largo de este texto, se detalla el desarrollo histórico de la ingeniería de control, desde la automatización de procesos industriales hasta el análisis en el dominio del tiempo y la síntesis a partir de variables de estado. Además, se explican conceptos básicos como la variable controlada y manipulada, el control en lazo cerrado y abierto, y el sistema de control.
Tipo: Apuntes
1 / 19

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Azucena Gonzalez Javier NUA: 145869 Fecha: 08 de mayo de 2022
DIVISIÓN DE INGENIERÍAS CAMPUS IRAPUATO-SALAMANCA
Fig. 1 La ingeniería de control es necesaria para la automatización de los procesos industriales.
El primer trabajo significativo en control automático fue el regulador de velocidad centrífugo de James watt para el control de la velocidad de una máquina de vapor en el siglo XVIII. En 1922 Minorsky trabajó en los controladores automáticos para dirigir embarcaciones y mostró que la estabilidad puede determinarse a partir de las ecuaciones diferenciales que describen el sistema. En 1932 Nyquist diseñó un procedimiento relativamente simple para determinar la estabilidad de sistemas en lazo cerrado con base en la respuesta en lazo abierto en estado estable cuando la entrada aplicada es una senoidal.
En 1934 Hazen que introdujo el término servomecanismos para los sistemas de control de posición analizó el diseño de los servomecanismos con relevadores capaces de seguir con precisión una entrada cambiante. Durante la década de los 40 ´s los métodos de la respuesta en frecuencia hicieron posible que los ingenieros diseñaran sistemas de control lineales en lazo cerrado que cumplieran con los requerimientos de desempeño. A finales de los años 40 ’s y principios de los 50 ´s se desarrolló por completo el método del lugar geométrico de las raíces propuesto por Evans.
Durante los años comprendidos entre 1960 y 1980 se investigaron a fondo el control óptimo tanto del sistemas determinísticos como estocásticos y el control adaptable mediante el aprendizaje de sistemas complejos. De 1980 a la fecha los descubrimientos en la teoría de control moderna se centraron en el control robusto.
La variable controlada es la cantidad o condición que se mide y controla. La variable manipulada es la cantidad o condición que el controlador modifica para afectar el valor de la variable controlada. Por lo común, la variable controlada es la salida (el resultado) del sistema. Controlar significa medir el valor de la variable controlada del sistema y aplicar la variable manipulada al sistema para corregir o limitar una desviación del valor medido a partir de un valor deseado.
Una operación o un desarrollo natural progresivamente continuo, marcado por una serie de cambios graduales que se suceden uno al otro en una forma relativamente fija y que conducen a un resultado o propósito determinados; o una operación artificial o voluntaria progresiva que consiste en una serie de acciones o movimientos controlados, sistemáticamente dirigidos hacia un resultado o propósito determinados. Cualquier operación que se va a controlar.
Una combinación de componentes que actúan juntos y realizan un objetivo determinado. Un sistema no necesariamente es físico. El concepto de sistema se aplica a fenómenos abstractos y dinámicos, tales como los que se encuentran en la economía. Por tanto, la palabra sistema debe interpretarse como una implicación de sistemas físicos, biológicos, económicos y similares.
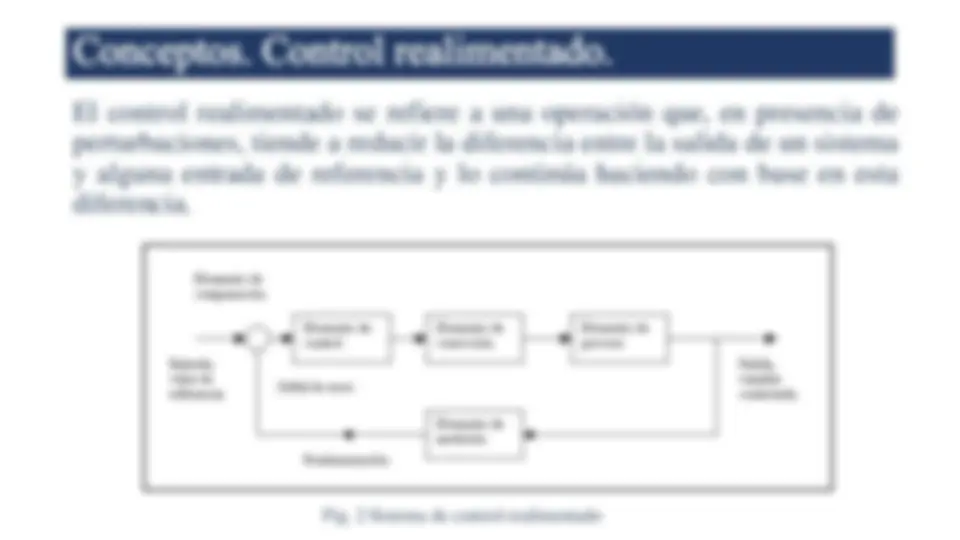
Fig. 2 Sistema de control realimentado
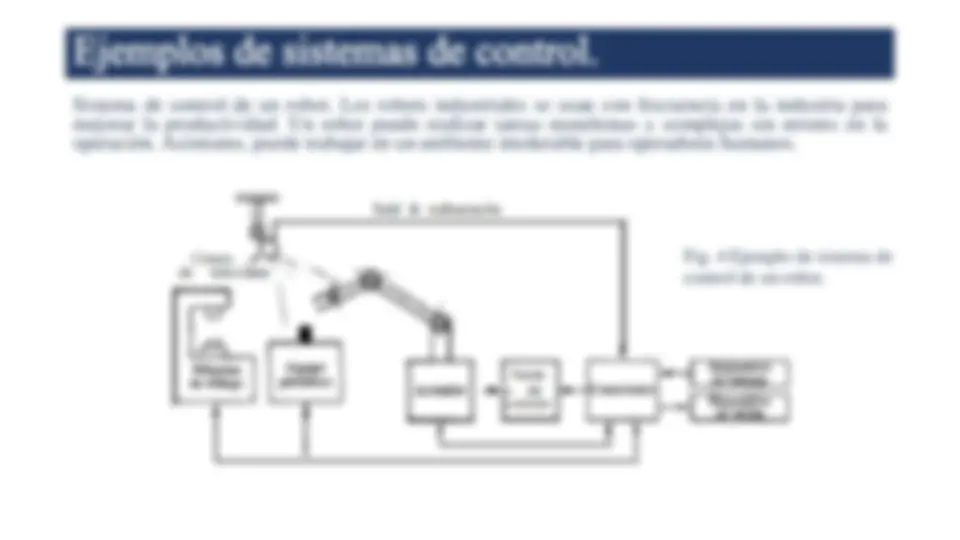
Sistema de control de velocidad. El principio básico del regulador de velocidad de Watt para una máquina Fig. 3 Ejemplo de sistema de control.
Los sistemas en los cuales la salida no afecta la acción de control se denominan sistemas de control en lazo abierto. En otras palabras, en un sistema de control en lazo abierto no se mide la salida ni se realimenta para compararla con la entrada. Un ejemplo practico es una lavadora. El remojo, el lavado y el enjuague en la lavadora operan con una base de tiempo. La máquina no mide la señal de salida, que es la limpieza de la ropa. Fig. 6. Sistema de control de lazo abierto.