¡Descarga Microcontroladores. y más Resúmenes en PDF de Electrónica solo en Docsity!
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
MICROCONTROLADORES
CAPITULO 1: Generalidades, especificaciones y conexionados externos del microcontrolador
INTRODUCCION
Los microcontroladores son circuitos integrados “programables”, que contienen todos los elementos de un computador. Este componente electrónico, ha revolucionado, en los últimos años, las técnicas de diseño, en lo referente a “sistemas de control industrial”. Esta diseñado para controlar sistemas que realizan una tarea especifica. Como esta integrado en una sola pastilla (chips), de reducido tamaño, suele estar incorporado al propio dispositivo que gobierna. Podemos decir que es un “computador completo”, con limitaciones en sus prestaciones. Aplicaciones comunes: Hornos microondas, lavarropas, sistema de inyección de automóviles, teclados de PC, impresoras, videos, sistemas de comunicaciones, procesos industriales etc.
Esquema general interno
Vcc.
Entradas Salidas
Esquema general de un sistema con microcontrolador
Entradas proceso Salidas
UCP
ROM
RAM
I / O I / O
interruptores
teclados
sensores
transductores
visualizadores
relés
parlantes
motores
Micro controlador (programa)
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
Diferencias entre sistemas basados con microprocesador y con microcontrolador:
El microprocesador, es un circuito integrado que contiene a “la unidad central de proceso(UCP) de un computador. Decimos entonces que el microprocesador es un “sistema abierto”, con el que puede construirse, un computador, con las caracteristicas que se desee, acoplando los modulos necesarios, para el sistema a controlar.El microprocesador puede sacar al exterior, las lineas de sus buses de direcciones, datos y control. El microcontrolador, es un “sistema cerrado”, dado que no son accesibles las líneas de los buses de direcciones, datos y control (salvo casos especiales de microcontroladores). El microcontrolador, tiene todos los elementos de un computador, con prestaciones limitadas que no se pueden modificar. Las entradas y salidas de un microcontrolador, están adaptadas eléctricamente a los respectivos periféricos.
Sistema con microprocesador
Tenemos algunas diferencias importantes entre los sistemas basados con microprocesador y microcontrolador. Cada uno tiene sus ventajas y desventajas, dependiendo de las necesidades de cada aplicación. Enumeraremos algunas de ellas: 1)- La UCP de los microcontroladores es más simple y sus instrucciones están orientadas, fundamentalmente, a la operación de cada una de las líneas de entrada / salida. 2)- La memoria RAM de datos de los microcontroladores, es de baja capacidad. La razón es que para aplicaciones de control e instrumentación normales, no se necesita almacenar gran cantidad de información temporal. En cambio en los microprocesadores, pueden acceder a través de los buses, a grandes bancos de memoria RAM externa de acuerdo a las necesidades del sistema.
Microprocesador
Memoria Controlador o interface
Controlador o interface
Bus de datos Bus de control
Sistema con microcontrolador
Periféricos (^) Microcontrolador Periféricos
Bus de direcciones
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
d)- Existen sistemas que requieren sistemas de control por ancho de pulso PWM como el caso de motores, cargas resistivas etc. Para este caso, hay disponibles microcontroladores con módulos PWM. e)- Para aquellos eventos que actúan en tiempo real o existen procesos que no dan “espera”, se deben utilizar la técnica llamada “interrupciones ”. Cuando una señal externa activa una línea de interrupción, el microcontrolador deja de lado la tarea que se encuentra ejecutando, para atender una situación especial y luego puede regresar a continuar con la labor que esta realizando.
Bloques internos principales y auxiliares de los microcontroladores
Partes principales:
-Unidad central de proceso (UCP) -Memoria no volátil para guardar el programa, por ejemplo EPROM (hay varios tipos) -Memoria no volátil para guardar datos, por ejemplo EEPROM. -Memoria de lectura / escritura para guardar datos. -Registros generales y especiales para programación. -Líneas de entrada / salida para los controladores periféricos con comunicación paralela -Líneas de entrada / salida para comunicación serie con periféricos (232C.I2C,USB,etc.)
Recursos auxiliares : -Circuito reloj (oscilador para sincronismo) -Temporizadores (timer) -Perro guardián (watch dog) -Conversores analógico / digital (A /D) y viceversa (D/A). -Comparadores analógicos. -Protección ante fallas de alimentación. -Estado de bajo consumo o reposo.
UCP
FLASH
RAM
EEPROM
I / O
I / O
PWM
A / D
TIMER 1
TIMER 2
TX
Rx
Alimentación +VCC
Señales de entrada/salida digitales
Salida pulsos modulados
Señal de entrada analógica
Salida temporizada o contador de pulsos externos
Transmisión y Recepción serie
Masa
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
Arquitecturas empleadas en los microcontroladores
Arquitectura de Von Neuman.
Ésta es la arquitectura de los grandes computadores y las PC. Tenemos un bus de control, un bus de “datos e instrucciones” que es compartido por los datos y las instrucciones del programa en ejecución. Además, tanto los datos como las instrucciones, comparten el uso de la memoria principal, lógicamente en distintas áreas. Esta arquitectura se utilizó en los primeros microcontroladores.
Arquitectura Harvard Bus de direcciones Bus de direcciones Instrucc. datos
Bus de instrucc. Bus de datos
Esta arquitectura, es la utilizada por los modernos microcontroladores. En ella, son independientes la memoria de instrucciones y la memoria de datos. Cada una, dispone de su propio sistema de bus de direcciones. Otra característica, esta en la UCP. Ésta responde a la arquitectura RISC (computadoras con juego de instrucciones reducido), identificada por poseer un juego de instrucciones de máquina pequeña y simple, de tal forma que la mayor parte de las instrucciones, se ejecuta en un ciclo de instrucción. Otra característica es la segmentación del procesador (pipe line) que permite procesar en etapas, las instrucciones para trabajar con varias a la vez. El alto rendimiento y elevada velocidad de los modernos microcontroladores, se deben a la aplicación de las arquitecturas Harvard, Risc y a la segmentación (pipe line) de las instrucciones.
La memoria de programa
El microcontrolador, esta diseñado para que en su memoria de programa, se almacenen todas las instrucciones del programa de control. En Gral., no se pueden utilizar memorias externas para su ampliación. Como el programa es siempre el mismo, éste se graba en forma permanente. Los tipos de memoria que admiten la retención de lo grabado, son cinco versiones: 1)- ROM con mascara : Se graba el chip durante el proceso de fabricación; se justifica ésta memoria cuando se deben grabar grandes cantidades de microcontroladores.
UCP
MEMORIA
instrucciones
datos
Memoria de instrucciones
UCP Memoria de datos
Bus de direcciones
Bus de datos e instrucciones
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
PRINCIPALES FAMILIAS DE MICROCONTROLADORES
Detallaremos brevemente las principales o más renombradas familias de microcontroladores. Existen en el mercado varias marcas reconocidas por sus características, comercialización, soporte técnico, difusión, usos en la industria etc. Entre ellas tenemos INTEL, MOTOROLA, MICROCHIP, PHILLIPS, NATIONAL y ATMEL.
Familia Intel 8051 : El primer microcontrolador fue el 8048 con 8bits de datos, con RAM interna, pero la memoria de programa era externa. En los años 80 nació el 8051, siendo el más difundido a nivel mundial. El 8051 tiene 4 Kbytes de ROM que deben programarse durante su construcción. El 8751 reemplazo la ROM por una EPROM. El 8031 no tiene ROM interna; el programa reside en memoria externa. Para la comunicación con la memoria, utiliza 3 de los cuatro puertos entrada / salida. Esta posibilidad de expansión es característica de esta familia.
Familia Motorola : Derivaron del microprocesador 6800, siendo optimizados para aplicaciones de control especializado, formando parte de aparatos de producción masiva como juguetes, equipos de video, impresoras, electrodomésticos y tienen amplia aplicación en la industria automotriz. Existen cinco familias principales: La 68H05, 68HC08 y 68HC11 de 8 bits; la 68HC12 y 68HC16 son de 16 bits, cada una de ellas con diferente UCP. Por ejemplo la 68hc05,representa a mas de 30 microcontroladores distintos con la misma UCP y de 8 bits.. Éstos incluyen RAM, ROM, puertos I/O, temporizadores, convertidores A/D y memorias PROM o EPROM.
Familia Microchip : Estos microcontroladores tienen arquitectura Hardware. Se clasifican en tres grupos, dependiendo de la longitud de palabra de instrucción que pueden manejar (12,14 o 16 bits), tomando las referencias 12XXX, 16XXXX, 17XXX y 18XXX. Los fabricantes los definen a los PIC como microcontroladores de 8 bits tipo RISC. Son de bajo costo poco consumo y alta velocidad de operación.
Familia ATMEL : Manejan 3 grandes grupos de microcontroladores RISC, cuyas UCP, llegan hasta los 32 bits. El 1° grupo tiene la arquitectura basada en el 8051 con memoria de programa FLASH. El 2° grupo es el AT91, los cuales soportan compilados en lenguaje “C”, ensamblador etc. El 3° grupo, AVR”, son arquitectura RISC y UCP de 8 bits y módulos de comunicación USART, SIP, ADC, etc.
Microcontroladores Basic Stamp : Toman como base el microcontrolador PIC los cuales forman un sistema soportados en una placa principal, que les permite programarlos en lenguaje “Basic Stamp”, siendo éste más sencillo que otros (lenguaje de alto nivel).El fabricante de estos sistemas es PARALLAX INC.
CARACTERISTICAS ESPECIFICAS DEL MICROCONTROLADOR PIC16X
El desarrollo de este curso sobre introducción a los microcontroladores, tomara como base al microcontrolador PIC16X84, fabricado por la empresa Microchip. Su elección, esta basada en las siguientes consideraciones: -Sencillez de su manejo -Abundante información técnica de aplicación
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
-Buen promedio en los parámetros: velocidad, consumo, tamaño, alimentación, código compacto, etc. Microchip, clasifica a sus microcontroladores en cuatro gamas a saber: 1º Gama básica : familias PIC 125xx y PIC 16C5x, con un repertorio de 33 instrucciones de 12 bits y dos niveles de pila 2º Gama media : Familias PIC 12C6xx, PIC 16Cxx y PIC 16F87x con 8 niveles de pila, 1 vector interrupción y 35 instrucciones de 14 bits. 3º Gama alta : PIC 17Cxx con 16 niveles de pila, 4 vectores de interrupción y 58 instrucciones de 16 bits. 4 º Gama mejorada : PIC 18Cxxx con 32 niveles de pila, 4 vectores de interrupción y 77 instrucciones de 16 bits. Para el caso especifico del PIC 16F84 que vamos a trabajar, dispone de 8 niveles de pila, 1 vector de interrupción y 35 instrucciones de 14 bits (gama media)
Partes principales y características eléctricas generales del PIC16X
- Tecnología de fabricación: Circuito integrado CMOS, técnica epitaxial
- Encapsulado plástico con 18 terminales.
- Unidad central de proceso.
- Memoria de programa : 1K x 14 bits EEPROM(PIC16C84) y FLASH (PIC16F84)
- Memoria de datos RAM (GPR) : 36 bytes (PIC16C84) y 68 bytes (PIC16F84)
- Memoria de datos EEPROM : 64 bytes para ambos modelos.
- PILA (stack): de 8 niveles (Memoria para subrutinas anidadas)
- Interrupciones : 4 tipos diferentes con 1 vector de interrupción.
- Temporizadores : uno solo, el TMRO, que puede actuar como temporizador de eventos o como contador de pulsos externos.
- Perro guardián (WDT) actúa para evitar que el microcontrolador quede “colgado” ante una falla temporal en la ejecución de las instrucciones. Líneas de entrada / salida digitales : 13 en total, 5 en Puerta A y 8 en Puerta B.
- Juego de instrucciones : 35 (de 14 bits)
- Corriente máxima absorbida : 80 mA en Puerta A y 150 mA en Puerta B.
- Corriente máxima suministrada : 50 mA en Puerta A y 100 mA en puerta B.
- Corriente máxima absorbida por línea : 25 mA
- Corriente máxima suministrada por línea : 20 mA
- Voltaje de alimentación : (VDD): de 2 a 6 volt. CC
- Voltaje de grabación : (VPP) : de 12 a 14 volt. CC
- Protección contra fallo de alimentación.
- Entrada para RESET.
- Entradas para osciladores externos.
- Estado de reposo o bajo consumo.
- Registro de trabajo W.
- Registros de propósitos especial (SFR) : Total 22 ubicados en la memoria RAM.
- Direccionamiento directo e indirecto de la memoria RAM
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
Como los microcontroladores PIC aplican la técnica de segmentación (pipe-line), que consiste en realizar en paralelo las dos fases que comprenden cada instrucción (búsqueda y ejecución), podemos decir que cada instrucción simple, se ejecuta en un tiempo de 1 ciclo de instrucción y las de salto, en 2 ciclos
| Q1 Q2 Q3 Q4 | Q1 Q2 Q3 Q4 | Q1 Q2 Q3 Q4 | Q1 Q2 Q3 Q4 | OSC1|-----|-----|-----|-----|-----|-----|-----|-----|-----|-----|-----|-----|-----|-----|-----|-----|
1 ciclo 1 ciclo 1 ciclo 1 ciclo |---------------------|----------------------|----------------------|----------------------|
Tipos de osciladores
Los microcontroladores PIC admiten cinco tipos de osciladores externos para aplicarle la señal con la frecuencia de funcionamiento. El tipo de oscilador empleado, debe especificarse en dos bits ( FOSC1 Y FOSC2 ) de la denominada “palabra de configuración” o registro de configuración, durante el proceso de grabación del programa, en la memoria de instrucciones del micro. Los tipos de osciladores son los siguientes; 1)- Oscilador tipo RC. 2)- Oscilador RC interno (INTRC) 3)- Oscilador tipo LP 4)- Oscilador tipo XT 5)- Oscilador tipo HS
Oscilador tipo RC : Este oscilador es de bajo costo, proporcionando una estabilidad en frecuencia mediocre. Se lo utiliza para aquellos casos donde los tiempos de funcionamiento (temporizaciones) no son exigentes.
PIC16X
Búsqueda 1 Ejecución 1
Búsqueda 2 Ejecución 2
Búsqueda 3 Ejecución 3
Búsqueda 4
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
Ejemplo de frecuencias de oscilación: Fosc Rex Cex 625 Khz 10 K 20 pF 80 Khz 10 K 220 pF 80 Hz 10 K 0.1 uF La resistencia exterior (Rex) varía entre 5 K y 100 K. Para valores menores de 5 K la oscilación se hace inestable y puede detenerse; para valores mayores de 100 K, se hace susceptible al ruido y la humedad. Por el terminal OSC2/CLKOUT podemos obtener la frecuencia del oscilador dividida por cuatro para sincronizar dispositivos externos.
Oscilador RC interno (INTRC Es la solución más económica, no siempre disponible en todas las familias de PIC. En los PIC 16X84 no existe esta variante. La frecuencia de oscilación se genera internamente sin elementos externos.
Oscilador tipo LP : Es un oscilador de bajo consumo y baja frecuencia con cristal de cuarzo o resonador cerámico. Esta diseñado para trabajar en frecuencias de 35 a 200 KHZ.
Oscilador tipo XT : Es un oscilador de cristal de cuarzo o resonador cerámico tipo estándar para frecuencias comprendidas entre 100 KHZ y 4 MHZ. Tiene un consumo de energía medio.
Oscilador tipo HS: Es un oscilador de cristal de cuarzo resonador cerámico con alta frecuencia, comprendida entre 4 y 10 MHZ. Tiene un consumo de energía alto.
Conexión del oscilador basado en cristal o resonador cerámico
RESONADOR
MODO FREC. C1/C
XT 455 KHZ
2,0 MHZ
4,0 MHZ
pf 15 – 68 pf 15 – 68 pf HS 8,0 MHZ 16 MHZ
pf 10 – 22 pf
PIC16X
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
El Terminal nº 3
El Terminal nº 3 del circuito integrado, denominado RA4/TOCKI, puede ser configurado como entrada/ salida o como de arranque de un temporizador/contador. Cuando se programa como entrada, este Terminal funciona como un disparador de Schmitt trigger ideal para reconocer señales distorsionadas o de crecimiento lento. Cuando trabaja como salida lo hace “colector abierto” (drenador abierto), es decir que no se puede utilizarlo como fuente de corriente, en este caso siempre se debe colocar un resistor externo entre la fuente de alimentación y el Terminal, según se muestra en el dibujo:
PERIFÉRICOS DIGITALES PARA LAS ENTRADAS Y SALIDAS
Entradas : En el primer programa que desarrollamos, introducimos los datos directamente. En la práctica el microcontrolador se comunica con el mundo exterior, a través de señales externas digitales o analógicas. De igual forma, son las señales de salida, que gobiernan el proceso controlado. Solamente analizaremos las señales digitales para el PIC16X84.
Puerto de salida normal
PIX16X84 PIX16X
Terminal 3
PIX16X
Terminales no utilizados
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
A) Sin pulsar: entrada en VDD (+) = 1 B) Sin pulsar: entrada en cero volt. = 0 Pulsando: entrada a cero volt. = 0 Pulsando: entrada en VDD (+) =
Contactos o interruptores :
El análisis de los circuitos, es similar al de los pulsadores
Circuitos de entradas antirrebotes :
Los dispositivos electromecánicos, al cerrar, provocan rebotes que pueden durar algunos milisegundos. Si no se toma ninguna acción, pueden provocar inestabilidad, en la mayoría de los circuitos digitales.
En el caso de los microcontroladores, tenemos dos tipos de soluciones:
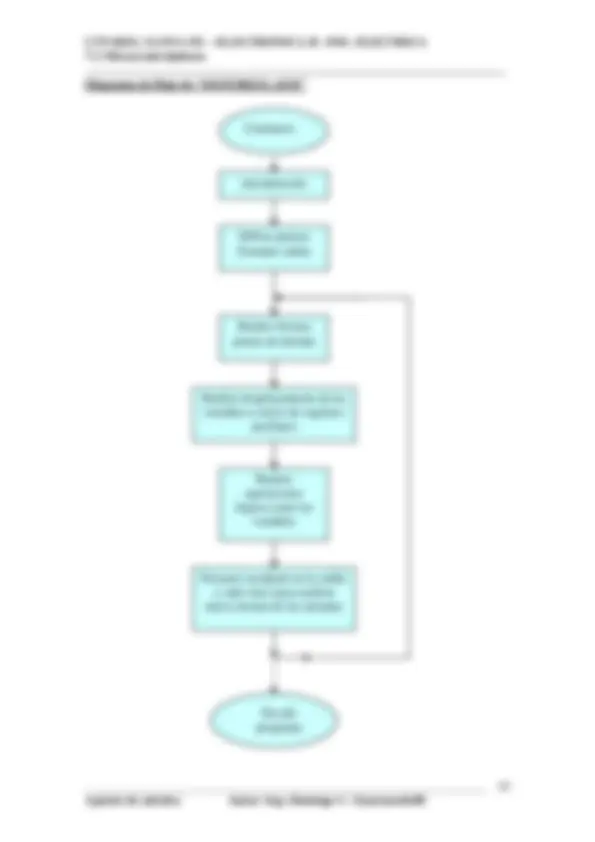
1)- Solución por programa :
Consiste en identificar el primer flanco de la señal de entrada, luego se pasa a un programa de “rutina de retardo” de varios milisegundos antes de pasar a detectar si se ha producido el flanco contrario.
Rebotes
Pulsación
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
Circuitos conectados a las salidas del microcontrolador
Diodos Leds :
Circuito (A): Cuando la salida del microcontrolador es una tensión positiva (uno lógico), entrega una corriente al diodo Leds, limitada por la resistencia eléctrica. El diodo Leds, emite luz.
Circuito (B): Cuando la salida del microcontrolador provee una tensión baja (0+), por el diodo Leds circula una corriente, dado que su ánodo, tiene aplicada una tensión positiva respecto a la masa o terminal común.
Utilización de transistores y diodos Leds:
Este circuito, se utiliza para amplificar la corriente de salida del microcontrolador. El transistor trabaja al corte y saturación. La resistencia en colector limita la corriente que se entrega al diodo Leds. La resistencia eléctrica en la base limita la corriente en la base del transistor y la de salida del microcontrolador. Cuando el microcontrolador entrega una tensión positiva (uno lógico), suministra corriente a la base del transistor. Este, pasa a la saturación, dando lugar a la corriente de colector que a su vez alimenta al diodo leds. Este último, emite luz. Las formulas de cálculo son las siguientes:
RC = (VCC – Vcsat. – Vd)/ Icsat. βsat: ganancia de corriente de saturación del transistor
No se puede utilizar esta salida para R3 (^) Se puede utilizar esta salida para R
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
IBsat = Icsat/ βsat V (+)= VDD =+5 volt. : Tensión de salida del microcontrolador RB = ( V(+) – Vbsat )/ IBsat
Activación por relés y microrelés:
A)- Actuando las salidas sobre relés, nos permite controlar cargas mucho mayores, dados que las corrientes de carga pasarán por los contactos del relé. Por ejemplo poner en marcha un motor eléctrico a través de un contactor. Un “uno” en la salida del micro (V+) produce el accionamiento del relé. Un “cero” (0+), el relé esta desactivado. B) Este es el caso de activación por microrelés con doble contacto. En este caso, el micro relé se activa con un “cero” en la salida del microcontrolador y se desactiva con un “uno lógico”. En este circuito, se utiliza un diodo Leds para indicar la activación del micro relé; el otro se utiliza para la aplicación.
Salidas opto acopladas :
Cuando la salida del microcontrolador vale “1” (V+), el Leds del opto acoplador se enciende y activa al fototransistor a la saturación, entregando entonces un “0” (0+) lógico al periférico. Cuando la salida del microcontrolador vale “0” (0+), el Leds esta apagado y el fototransistor esta desactivado (corte); se entrega un “1” (VCC+) al periférico.
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
Este microcontrolador, admite cinco diferentes tipos de reset: 1)- Reset al encendido “POR ” (Power On Reset), hasta estabilizar VDD y el oscilador; Si esta habilitado, se logra conectando el terminal de reset (MCLR#) con el terminal de la entrada de la tensión de alimentación VDD.(se conecta a través de una resistencia eléctrica) 2)- Reset por pulsación externa (Master clear); se logra, llevando a masa el terminal de reset. 3)- Reset por pulsación externa (Master Clear), cuando el microcontrolador esta en el estado de bajo consumo (modo sleep). Se logra de la misma forma que el reset nº 4)- Actuación del circuito de vigilancia “perro guardián” (watchdog) durante la operación normal (si esta habilitado). 5)- Actuación del circuito de vigilancia “perro guardián” durante el modo de reposo (modo slepp), si esta habilitado. Un circuito sencillo que admite un reset al encendido” (si esta habilitado) y reset por pulsación externa (2 y 3), es el siguiente:
Circuito práctico
El siguiente circuito práctico muestra un conexionado común en casi todas las aplicaciones. Dispone de un circuito de reset, un oscilador a cristal con una frecuencia de oscilación de 4 MHZ (tipo XT), una entrada a contacto (RA1) y una salida con un diodo LEDS (RB1). La tensión de alimentación, es de 5 volt., que es un valor normal de aplicación para los microcontroladores PIC. Para una mayor estabilidad de funcionamiento resulta conveniente que la tensión de alimentación sea provista por una fuente regulada, como podría ser con el CI 7805
Pulsador
2 PIC16X84 17
4 MLCR 15
7-2 Microcontroladores ……………………………………………………………………………………………
___________________________________________________________________
Esquema de la fuente de alimentación +VDD
CI
PIC16X