





























































Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: ADE, Profesor: nuria nuria, Carrera: Administración y dirección de empresas, Universidad: UJAEN
Tipo: Apuntes
1 / 69

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
a) Modelación matemática de PPL (Problemas de Programación Lineal). b) Solución gráfica de PPL (2 variables). c) Análisis de sensibilidad gráfico. d) El método "SIMPLEX" de solución de PPL (n variables). e) Dualidad y holguras complementarias. f) Software computacionales para solución de PPL. g) Programación lineal entera.
a) El modelo de Transporte. b) El modelo de Asignación.
a) Malla PERT ("Program Evaluation Review Technique") y método CPM ("Critical Path Method"). b) Problemas de Ruta mas corta. c) Arbol mínimo de comunicaciones. d) Flujo máximo. e) Transbordo capacitado.
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
a) Decisiones basadas en la INTUICION. b) Decisiones basadas en la EXPERIENCIA. c) Decisiones basadas en un METODO CIENTIFICO de análisis del sistema.
a) Observar. b) Plantear una hipótesis o modelo del comportamiento del sistema y su reacción ante diferentes estímulos. c) Implementar experiencias que comprueben la validez de la hipótesis. d) Observar los resultados y mejorar la hipótesis si esta no se cumple.
a) Observar el sistema considerando el objetivo que se persigue con el estudio. b) Identificar las variables y restricciones que influyen positiva y negativamente en el comportamiento del sistema y en el objetivo propuesto y determinar o calcular los parámetros de interrelación entre ellas. c) Plantear el modelo matemático que representa el comportamiento del sistema a la luz del objetivo de optimización perseguido. d) Encontrar una solución teórica óptima a través de algoritmos matemáticos apropiados. e) Implementar la solución teórica óptima. f) Observar los resultados reales y retroalimentar hacia a) si la solución teórica difiere de la real.
a) OPTIMO Lo mejor posible dadas las restricciones del sistema. b) EFICAZ Quién logra cumplir el objetivo. c) EFICIENTE Quién logra cumplir el objetivo al menor costo posible, en tiempo, en dinero, etc. d) MODELO: Representación de la Realidad ABSTRACCION SELECTIVA DE LA REALIDAD
Ejemplos : Modelos físicos (Maquetas)
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
Modelos pictóricos (Mapas) Modelos icónicos (De imagen Ej. TV)
Modelos matemáticos Ej. D
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
1. Repaso de Geometría Analítica Plana
a) La ecuación a X + b Y = c representa en el plano una recta de pendiente
m
a b
b) La ecuación a X + b Y = 0 representa en el plano una recta que pasa por el origen de coordenadas.
c) En la ecuación normalizada de la recta
c a
c b
c a y^
c b representan los puntos de corte de los ejes X e Y, respectivamente. d) La función Z = a X + b Y, , con Z una constante indeterminada, representa en el plano a una familia de rectas paralelas.
a X + b Y = c y se extiende acercándose hacia el origen de coordenadas.
a X + b Y = c y se extiende alejándose del origen de coordenadas.
g) La solución (X 0 ,Y 0 ) del sistema de ecuaciones
aX bY c dX eY f
indica las
coordenadas del punto de corte de ambas rectas.
2. Metodología de solución:
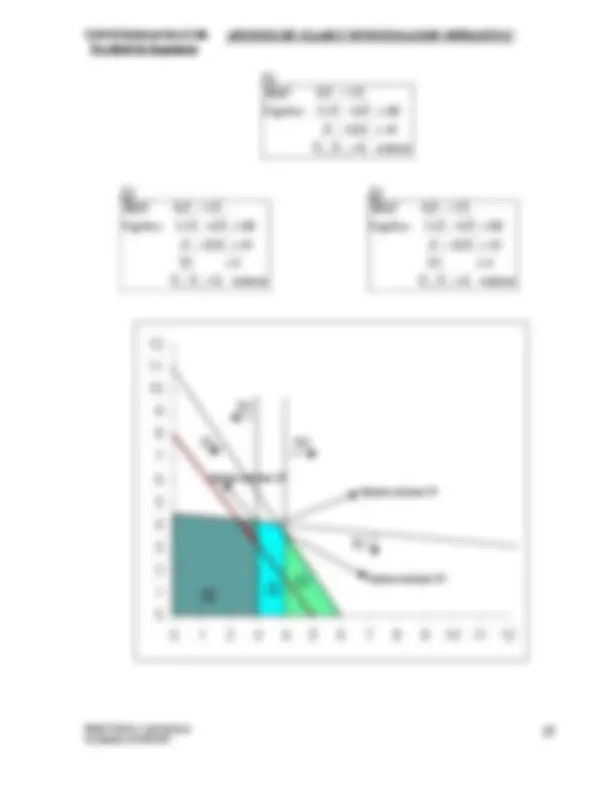
a) Encuentre el modelo matemático del PPL en dos variables. b) Encuentre las ecuaciones normalizadas de las rectas límite de las restricciones. c) Tomando en consideración los puntos de corte definidos en las ecuaciones normalizadas, dibuje los ejes coordenados con una escala apropiada. d) Dibuje en los ejes coordenados las rectas límite de las restricciones e identifique el lugar geométrico que cada restricción representa en el plano. e) Identifique y destaque la “ZONA DE SOLUCIONES FACTIBLES”, definida como el conjunto intersección de todos los lugares geométricos que las restricciones representan en el plano. f) Dibuje una de las rectas de la familia de rectas que la F.O. representa en el plano, dando un valor arbitrario a Z, pero adecuado a la escala de los ejes coordenados y denomínela “Recta Objetivo de Referencia” (r.o.r.). g) Dependiendo si la F.O. es de maximización o de minimización, traslade la recta paralelamente, en el sentido de aumento o disminución de Z, hasta que esta
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
toque un punto extremo de la zona de soluciones factibles. Identifique dicho punto como óptimo máximo u óptimo mínimo. h) Para encontrar las coordenadas del punto óptimo resuelva el sistema de ecuaciones de las rectas límite cuya intersección define dicho punto. i) Para encontrar el valor óptimo de Z reemplace las coordenadas del punto óptimo en la función objetivo.
PROBLEMA EJEMPLO EN 2 VARIABLES (Solución Gráfica) Una industria fabrica tres productos químicos; A, B y C. Estos productos se obtienen por medio de cualesquiera de dos procesos; los procesos 1 y 2. Una hora de ejecución del proceso 1 tiene un costo de US$ 4 y se obtienen 2 unidades del producto "A", 1 unidad del producto "B" y 1 unidad del producto "C". Por otra parte, una hora de ejecución del proceso 2 cuesta US$ 1 y rinde 4 unidades de producto "A" y 1 unidad de producto "B". Para satisfacer la demanda de los clientes se deberían producir a lo menos 8 unidades de producto "A", 5 unidades de producto "B" y 3 unidades de producto "C", diariamente. No obstante lo anterior, las estimaciones del departamento de venta indican que la producción diaria máxima de producto A debería ser a lo más de 16 unidades. Cada proceso se puede ejecutar como máximo 7 horas al día pues requieren tiempo de preparación. a. ¿Cuántas horas de ejecución diarias se deben implementar de cada proceso para minimizar el costo y cumplir con los clientes? b. ¿Cuántas unidades de cada producto se producirán.? c. ¿Cuál es el costo diario mínimo, alcanzable con su solución.?
MODELO MATEMÁTICO:
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
Una empresa produce dos tipos de producto, el producto 1 y el producto 2. Ambos productos se producen en los mismos departamentos y con la misma maquinaria. El gerente de mercadotecnia cree que podrá vender todos los productos 1 y 2 que sean capaces de producir el próximo mes. Los antecedentes y restricciones relevantes que se han identificado en el sistema productivo son las siguientes: Los productos 1 y 2 dejan una utilidad unitaria de $ 5000 y $ 4000 c/u, respectivamente. El consumo de horas máquina por unidad de producto y la disponibilidad de ellas para el próximo mes se indican en la tabla: HORAS Departamento Por producto 1 Por producto 2 Total disponible A 10 15 150 B 20 10 160
Se ha establecido con el sindicato un número de horas mínimas de trabajo para el personal de la sección control de calidad que es de 135 horas. Cada producto 1 que se fabrique requiere de 30 horas de control y cada producto 2, 10 horas. Como política de mercado la gerencia ha definido que se debe fabricar a lo menos un producto 2 por cada tres productos 1. Un cliente importante ha ordenado un total de cinco unidades de producto, en cualquier combinación de tipo 1 y tipo 2.
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
Sujeto a : 3X
y ; Irrestricta en signo
1
1 2 3
2 3 1 2 3 1 2 3 1 3 2
Modelo estándar Sea X (^) 2 = U − V , entonces:
Sujeto a : 3X
y U y V 0 , U V = 0
1
1 3
3 1 3 1 3 1 3
c) Las restricciones deben ser todas igualdades Si existen restricciones que son desigualdades, deben transformarse en igualdades
donde i es el número de la restricción correspondiente a la holgura que se agrega.
Cuando la restricción es del tipo menor o igual que (≤) la variable de holgura tiene coeficiente (+1). Por el contrario, si la restricción es del tipo mayor o igual que (≥) la variable de holgura tiene coeficiente -1.
Ejemplo: Modelo original: MAX Sujeto a : 3X
y ; Irrestricta en signo
1
1 2 3
2 3 1 2 3 1 2 3 1 3 2
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
Modelo estándar Sea X (^) 2 = U − V , entonces :
Sujeto a : 3X
; ; H y H U y V 0 , U V = 0
1
1 3
1 3
3 1 1 3 1 3 3 1 3
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
Sea Xj la cantidad de acciones tipo j a adquirir (j=A,B,C).
X 0 H 0 j , i
Sujetoa:
j i
A B C 4
C 3
B 2
A 1
FO Z = − XA − XB − Xc
La tabla simplex original es la representación tabular de las ecuaciones de un modelo de programación lineal estandarizado. En nuestro ejemplo la tabla simplex original sería:
cj -7 -3 -3 0 0 0 0 1 0
Una tabla simplex se encuentra en forma canónica cuando en su matriz de coeficientes existe una matriz identidad de orden (m+1), siendo m el número de restricciones. En una tabla simplex canónica se distinguen VARIABLES BASICAS y VARIABLES NO BASICAS. Son variables básicas aquellas asociadas a las columnas de la matriz identidad (Se destacan con ***** ) y son no básicas las restantes. Las variables no básicas tienen valor cero por definición. Una tabla simplex canónica SIEMPRE representa una SOLUCION FACTIBLE para el problema de programación lineal. Cuando todas las restricciones de un P.P.L. son del tipo limitaciones (≤), la tabla simplex original siempre estará en forma canónica y siempre representará la solución nula, es decir, todas las variables de decisión iguales a cero, las
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
variables de holgura iguales al término libre de la restricción y la función objetivo igual a cero. (Es el resultado de hacer nada).
Tabla simplex canónica del problema ejemplo: Variables básicas H 1 , H 2 , H 3 y H 4 Variables no básicas XA, XB y XC Solución Factible: XA, XB y XC = 0; H 1 =1000, H 2 =1000, H 3 =1500, H 4 = 100.000, Z’ = 0; Z=
cj -7 -3 -3 0 0 0 0 1 0
Una tabla simplex canónica representa una solución óptima para el P.P.L. si y sólo si todos los coeficientes cj son no negativos.
Si en una tabla simplex canónica existen c (^) j negativos, significa que la solución no es óptima pero que sí puede mejorarse, es decir, obtener un mejor valor para la F.O. El mejoramiento de una solución se realiza efectuando combinaciones lineales entre las filas de la tabla, es decir, entre las ecuaciones del modelo estandarizado. Estas combinaciones lineales permiten reemplazar una variable actualmente básica por otra que en la actualidad no lo es y dan origen a una nueva solución con un mejor valor para la F.O. que se intenta optimizar.
a) Criterio de Entrada a la Base de Solución Debe entrar a la base de solución una variable no básica asociada a un cj negativo. Normalmente conviene hacer entrar a la base aquella variable no básica asociada al cj mas negativo.
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
cj 0 -3 -3 7 0 0 0 1 7000 F5+3F
cj 0 0 -3 7 3 0 0 1 10000
Esta nueva tabla representa otra solución factible para el P.P.L., a saber: XA=1.000, XB =1.000, XC , H 1 y H 2 =0, H 3 =1.500 , H 4 =15.000 , Z’= -10.000 , Z = 10.
La solución tiene un mejor valor para Z pero no es aún la óptima pues existen cj < 0, por lo que se debe mejorar.
cj 0 0 -3 7 3 0 0 1 10000 F5+3F
cj 0 0 0 -2 -3/4 0 3/20 1 12250
Facultad de Ingeniería
PROF. JUAN A. CARVAJAL G.
Esta nueva tabla representa otra solución factible para el P.P.L., a saber: XA=1.000, XB =1.000, XC=750 (^) , H (^) 1 , H 2 y H 4 =0, H 3 =750 , Z’= -12.250 , Z = 12.
La solución tiene un mejor valor para Z pero no es aún la óptima pues existen cj < 0, por lo que se debe mejorar.
cj 0 0 0 -2 -3/4 0 3/20 1 12250 F5+2F
cj 0 0 0 0 1/12 2/3 7/60 1 12750
Esta nueva y última tabla representa la solución óptima para el P.P.L. pues cumple con la condición de optimalidad.
La solución óptima única del PPL es:
XA=750, XB =1.000, XC=1.500, H * 1 =250, H * 2 , H 3 , y H * 4 =0, Z’^ = -12.750 , Z^ = 12.