¡Descarga Práctica 5: Compensador de Atraso de Fase y más Ejercicios en PDF de Control de Procesos solo en Docsity!
Pra José Raymundo Santana Ruiz - 13121097 Iván Yáñez Velásquez - 13121102 Rodrigo Treviño Bernal - 14120099 Juan David Serrato Reyes - 13560648 Control 2|8vo semestre| ITM| Docente: Febe Jocabed Zavala Mendoza Fecha de realización: 08 de Mayo del 2018. Fecha de entrega: 15 de Mayo del 2018
PRÁCTICA 5: COMPENSADOR
DE ATRASO DE FASE
Introducción
El compensador de atraso es comúnmente en el lugar de las raíces se diseñan sólo compensadores de atraso de fase que mejoren el error en régimen permanente pero no modifiquen el régimen transitorio del sistema, la única forma de que el polo y cero que agrega el compensador en el lugar de las raíces no modifiquen la localización de los polos objetivo que caracterizan el régimen transitorio y, a la vez, puedan mejorar sustancialmente el régimen permanente del sistema, es que ambos estén muy cerca del origen, es por esto que la ganancia del compensador de atraso es unitaria. Un polo y un cero exactamente en un mismo lugar se anulan, pero si están muy cerca el uno del otro, su influencia es casi despreciable. Cualquier punto del plano s suficientemente alejado de ellos los verá con el mismo ángulo y distancia, por lo que no cambiará el lugar de las raíces, es decir, el hecho de que pase o no por ese punto. Además, si el polo y el cero están muy próximos entre sí, y a la vez están muy cerca del origen, es posible mejorar cuanto se desee el error en régimen permanente sin modificar el lugar de las raíces del sistema y, por tanto, conservando los mismo polos objetivo.
Cálculos
Compensador de retardo electrónico usando amplificadores
operacionales.
Tal compensador es igual a la del compensador de adelanto de la fig.1, siempre
y cuando R 2 C 2 >^ R 1 C 1
Dejamos los valores de valores iguales, siendo éstos de 1 μF. R3 de un valor cercano a 10 kΩ y R4 igual a 6.5 kΩ. Para los valores de R1 y R2 se trabajaron con valores de 3.7 kΩ y 66.66 kΩ o valores muy cercanos a éstos.
Diagrama de Bode Experimental. Usando un generador de funciones se hiso un barrido de frecuencias para conocer la respuesta del sistema. delta t vi frecuencia Vo ganancia en dB angulo fase ángulo 1.60E-03 3.92 5 4.12E+00 4.32E-01 -2.88 0.0502656 2. 1.64E-03 4.04 10 4.08E+00 0.08557596 -5.904 0.10304448 5. 1.28E-03 4.04 20 3.92E+00 -0.261905962 -9.216 0.16084992 9. 9.00E-04 3.96 30 3.66E+00 -0.684282011 -9.72 0.1696464 9. 7.20E-04 4 40 3.40E+00 -1.411621486 -10.368 0.18095616 10. 5.40E-04 4.08 50 3.36E+00 -1.686417714 -9.72 0.1696464 9. 4.00E-04 4.08 60 3.30E+00 -1.842924464 -8.64 0.1507968 8. 3.36E-04 4.08 70 3.20E+00 -2.110203695 -8.4672 0.147780864 8. 2.80E-04 4.06 80 3.10E+00 -2.343286795 -8.064 0.14074368 8. 2.00E-04 4.08 90 3.06E+00 -2.498774732 -6.48 0.1130976 6. 1.56E-04 4.06 100 3.06E+00 -2.456092142 -5.616 0.09801792 5. 5.20E-05 4.12 200 2.96E+00 -2.872110099 -3.744 0.06534528 3. 2.40E-05 4.04 300 2.94E+00 -2.760680694 -2.592 0.04523904 2. 1.60E-05 4.04 400 2.92E+00 -2.819970273 -2.304 0.04021248 2. 1.00E-05 4.04 500 2.92E+00 -2.819970273 -1.8 0.031416 1. 5.00E-06 4.04 600 2.88E+00 -2.939777547 -1.08 0.0188496 1. 4.00E-06 4 700 2.88E+00 -2.853350071 -1.008 0.01759296 1. 2.00E-06 3.84 800 2.80E+00 -2.743463861 -0.576 0.01005312 0. 1.00E-05 3.84 900 2.80E+00 -2.743463861 -3.24 0.0565488 3. 0.00E+00 3.78 1000 2.78E+00 -2.668940078 0 0 0 Los resultados se muestran en la tabla 1, donde se muestran los valores de frecuencia, ω, ganancia y fase. Tabla 1.- Resultados del compensador de atraso con amplificadores operacionales
delta t vi frecuencia Vo ganancia en dB angulo Fase Radianes
Tabla 2.- Resultados del compensador de atraso con amplificadores operacionales y con un sistema
- 1.90E-03 2.22 5 2.32E+00 3.83E-01 -3.42 3.42 0.
- 1.80E-03 3.2 10 3.22E+00 0.054117868 -6.48 6.48 0.
- 1.30E-03 3.68 20 3.52E+00 -0.386103104 -9.36 9.36 0.
- 9.80E-04 3.8 30 3.48E+00 -0.764087053 -10.584 10.584 0.
- 8.00E-04 3.92 40 3.32E+00 -1.442959666 -11.52 11.52 0.
- 5.80E-04 3.96 50 3.20E+00 -1.850904152 -10.44 10.44 0.
- 4.40E-04 4 60 3.20E+00 -1.93820026 -9.504 9.504 0.
- 3.60E-04 4 70 3.12E+00 -2.158107946 -9.072 9.072 0.
- 3.00E-04 4 80 3.04E+00 -2.383728154 -8.64 8.64 0.
- 2.20E-04 4.08 90 3.04E+00 -2.55573159 -7.128 7.128 0.
- 1.80E-04 3.96 100 3.00E+00 -2.411478624 -6.48 6.48 0.
- 5.60E-05 4 200 2.90E+00 -2.793239869 -4.032 4.032 0.
- 2.70E-05 4 300 2.88E+00 -2.853350071 -2.916 2.916 0.
- 1.70E-05 4 400 2.88E+00 -2.853350071 -2.448 2.448 0.
- 1.60E-05 3.92 500 2.82E+00 -2.860739174 -2.88 2.88 0.
- 1.60E-05 3.88 600 2.82E+00 -2.771652345 -3.456 3.456 0.
- 1.20E-05 4.12 700 3.00E+00 -2.755519226 -3.024 3.024 0.
- 1.20E-05 4.12 800 2.96E+00 -2.872110099 -3.456 3.456 0.
- 1.00E-05 4.08 900 2.92E+00 -2.905546233 -3.24 3.24 0.
- 1.00E-05 4.04 1000 2.92E+00 -2.819970273 -3.6 3.6 0.
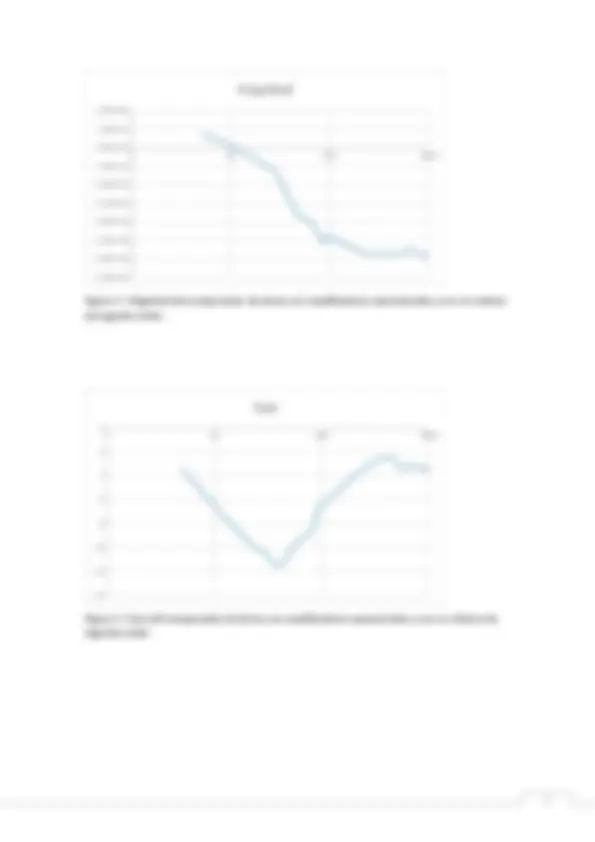
1 10 100 1000 -3.50E+ -3.00E+ -2.50E+ -2.00E+ -1.50E+ -1.00E+ -5.00E- 0.00E+ 5.00E- 1.00E+ Magnitud Figura 3.- Magnitud del compensador de atraso con amplificadores operacionales y con un sistema de segundo orden 1 10 100 1000
- 0 fase Figura 4.- Fase del compensador de atraso con amplificadores operacionales y con un sistema de segundo orden
Conclusiones
IVAN YAÑEZ VELAZQUEZ En esta última práctica pudimos observar y caracterizar el funcionamiento general de un circuito compensador, tanto de manera práctica como simulada y así entender más el concepto de compensadores y el cómo afectan a un sistema conocido. Proponiendo valores de capacitancia se puede obtener un compensador de ganancia unitaria y con las características deseadas, gracias a la función de transferencia del circuito compensador esto se puede modelar. JOSÉ RAYMUNDO SANTANA RUIZ En la práctica llevamos a cabo el compensador de atraso de fase. Dado que el compensador fue implementado con un sistema de segundo orden con una curva de ganancia específica debido al sobre-impulso del sistema, obteniendo igualmente una gráfica un tanto extraña a la salida del sistema compensado, pero que tiene sentido conociendo el cómo se deberían ver ambas gráficas por separado. Dada la naturaleza del compensador, rápidamente nos dimos cuenta cuando el experimento estaba saliendo bien, al llevar a cabo la medición de datos de la fase y ver su comportamiento en la gráfica de Excel. RODRIGO TREVIÑO BERNAL En la última practica realizamos un barrido de frecuencias de un compensador de atraso con amplificadores operacionales y con un circuito de segundo orden para obtener el diagrama de bode tanto en fase como en magnitud del sistema de atraso, dado que el compensador de segundo orden tiene una pequeña ganancia debido a un sobre impulso del sistema, la cual se puede observar en la simulación de matlab más claramente. En el barrido de frecuencia se pudo observar cómo se fue tomando un atraso en la salida del sistema a comparación de la señal de entrada del sistema. JUAN DAVID SERRATO REYES Haciendo una analogía a la práctica anterior con un compensador de adelanto, para el de atraso se obtuvo por medio de su función de transferencia a partir de un CTO. Pasa bajas, para lo cual al utilizar nuestras fórmulas obtenemos nuestros valores capacitivos y resistivos los cuales propusimos por medio del capacitor para así poder tener valores que se puedan encontrar con mayor facilidad lo cual nos brinda la gama comercial de resistores. Se realiza un barrido de frecuencia para observar que tanto se atrasa nuestra señal de salida a respuesta de nuestra señal de entrada como su atenuación y que sea correspondiente al momento
de graficar la, es decir debe salir un filtro pasa bajas y su respectivo gráfico de fase, vale la pena destacar que comúnmente se diseñan para que no modifiquen el régimen transitorio del sistema la única forma de no modificar la localización de los polos y ceros que agrega el compensador en su F.T que caracteriza el régimen transitorio y, a la vez, puedan mejorar el régimen permanente del sistema, por lo que ambos están muy cerca del origen, es por eso que la ganancia del sistema del compensador de atraso debe ser unitaria.