¡Descarga sesión 9 - control 1 y más Diapositivas en PDF de Control de Procesos solo en Docsity!
CONTROL - I
ANÁLISIS Y DISEÑO DE CONTROLADORES MEDIANTE LGR
TEMARIO
- Lugar geométrico de raíces
- Criterios de diseño - LGR
- Ejemplo
- Caso práctico
1. LUGAR GEOMÉTRICO DE RAÍCES
- Es una herramienta que sirve para determinar todas las posibles raíces de una ecuación característica de 1+G(s)H(s)=0 cuando varía la ganancia K de un sistema.
- Permite analizar el comportamiento total del sistema de lazo cerrado en régimen transitorio.
- Reescribo la ecuación: G(s)H(s)=-1, obteniendo una respuesta en forma de número complejo: a+jb=-1+j0, cuya parte imaginaria es 0. Se representa el número complejo en forma polar como un vector de magnitud «r» y dirección «θ»
1. LUGAR GEOMÉTRICO DE RAÍCES
Condición de fase: ∟180°n
- La clave para determinar todos los posibles lugares geométricos (o polos de lazo cerrado del polinomio característico) está contenida en la condición de fase, ya que cualquier valor de «s» que satisfaga dicha relación angular será una raíz de la ecuación característica considerada. Condición de magnitud: 1 La condición de magnitud se utiliza para asignar una escala al lugar geométrico resultante, cuya aplicación directa será la de cuantificar las ganancias requeridas para operar en puntos específi cos del LGR con la fi nalidad de satisfacer las especifi caciones de funcionamiento en régimen transitorio.
1. LUGAR GEOMÉTRICO DE RAÍCES
Ejemplo: 1 Calculando en el punto de prueba: s=-1.
2. CRITERIOS DE DISEÑO LGR
- Como parámetros de diseño, se consideran aquellos referentes al régimen transitorio: - Amortiguamiento λ - Frecuencia angular de oscilación ω - Frecuencia natural no amortiguada ωn - Constante de tiempo τ
- Para la etapa de diseño, el software toma gran relevancia, con los siguientes comandos es posible ajustar la ganancia K para satisfacer las especificaciones de funcionamiento; las instrucciones que se utilizarán son:
- [k,poles]=rlocfind(num,den). Muestra un LGR que permite que el usuario elija una ubicación específica sobre el LGR.
- [k,poles]=rlocfind(num,den,polo específico). Es semejante de a la instrucción anterior, con la variante que el programa muestra la ganancia y los polos restantes relacionados con el polo específico escrito por el usuario.
3. EJEMPLO
- Iniciamos el trabajo con la función en lazo abierto:
- Ahora calculamos λ a partir de MP=5%, entonces λ = 0.69.
- Calculamos el ángulo del sistema del vector, definido por: β = cos ିଵ^ λ
3. EJEMPLO
- Script de trabajo:
- num=[1]; den=conv([1 0.5],[1 3.5]); % Definición de G(s)H(s)
- rlocus(num,den) % Muestra la gráfica del LGR
- hold on % Este comando retiene la gráfica; si se desea, es posible empalmar gráficas adicionales: semicírculos asociados con wn y % rectas a ciertos ángulos relacionadas con amortiguamientos
- g=tf(num,den); % Conversión de (num,den ) a función racional
- k=0:0.1:40; % Rango e intervalo de variaciones de ganancia K
- rlocus(g,k)
- axis([−4 0.1 −3 3]) % Personalización de ejes
- b=0.6901; % Definición del amortiguamiento lambda traza sobre el LG una recta con ángulo beta asociada a lambda=b
- plot([0 −3.5b],[0 3.5sqrt(1−b^2)],[0 −3.5b],[0 −3.5sqrt(1−b^2)]) % Posicionamiento del cursor sobre un punto especifico del LGR
- [k,poles]=rlocfind(num,den)
3. EJEMPLO
- La ganancia que permite obtener los polos deseados:
- polos = −2.0000 + 2.0963i; −2.0000 − 2.0963i; es aproximadamente 6.
3. EJEMPLO
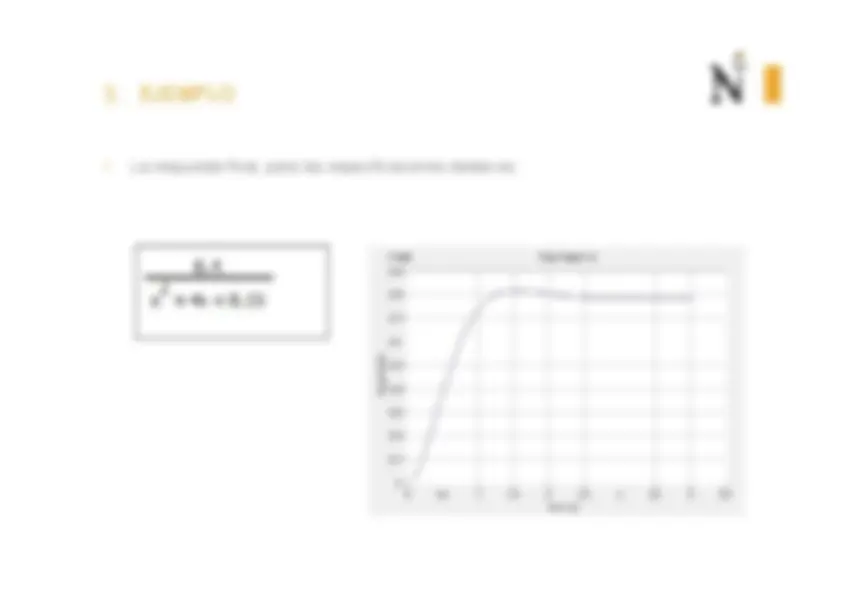
- La respuesta final, para las especificaciones dadas es:
Gracias por su
atención
Ing. Marco Grijalba Mauricio [email protected]