Vista previa parcial del texto
¡Descarga Sistema de control ubicado en la máquina de coser y más Diapositivas en PDF de Ingeniería Mecánica solo en Docsity!
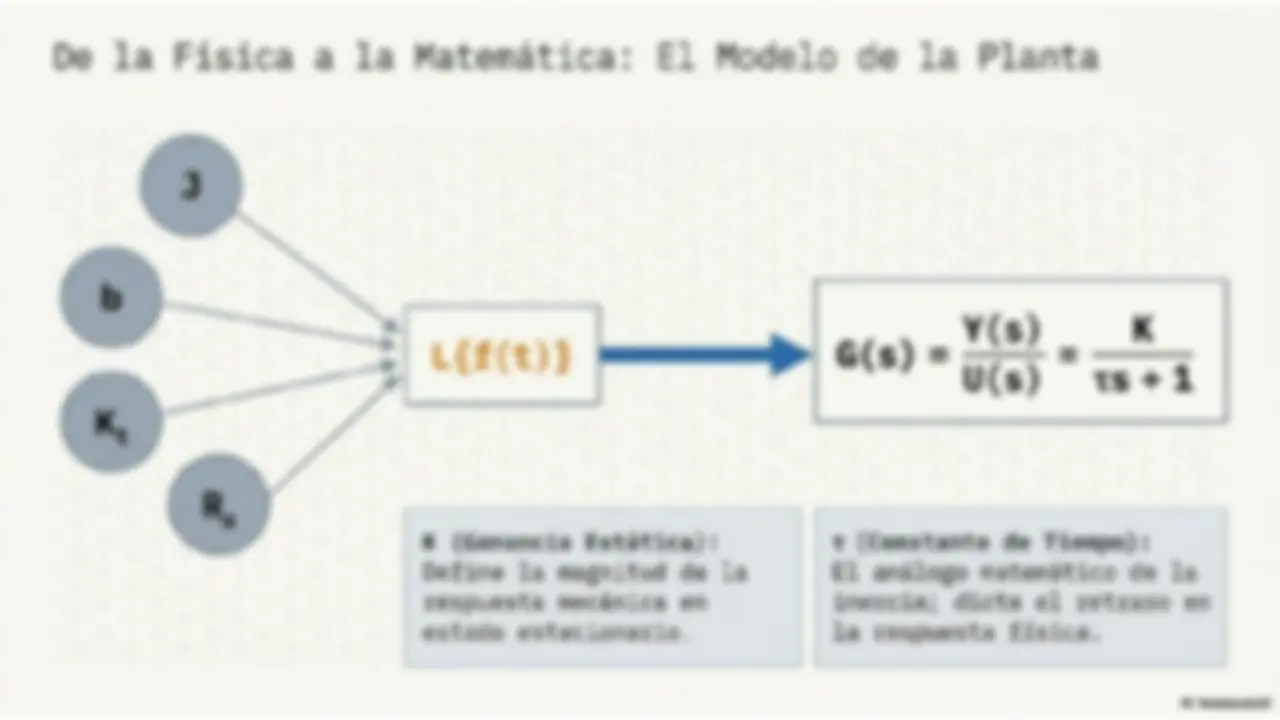
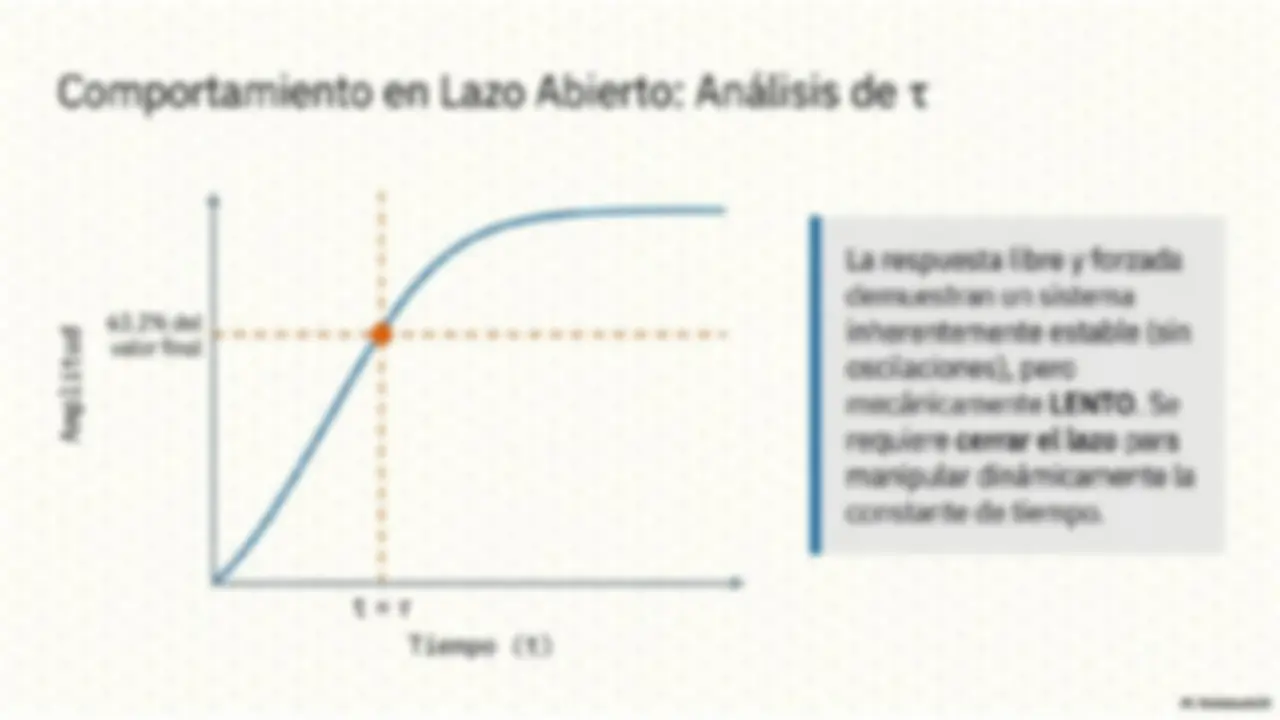
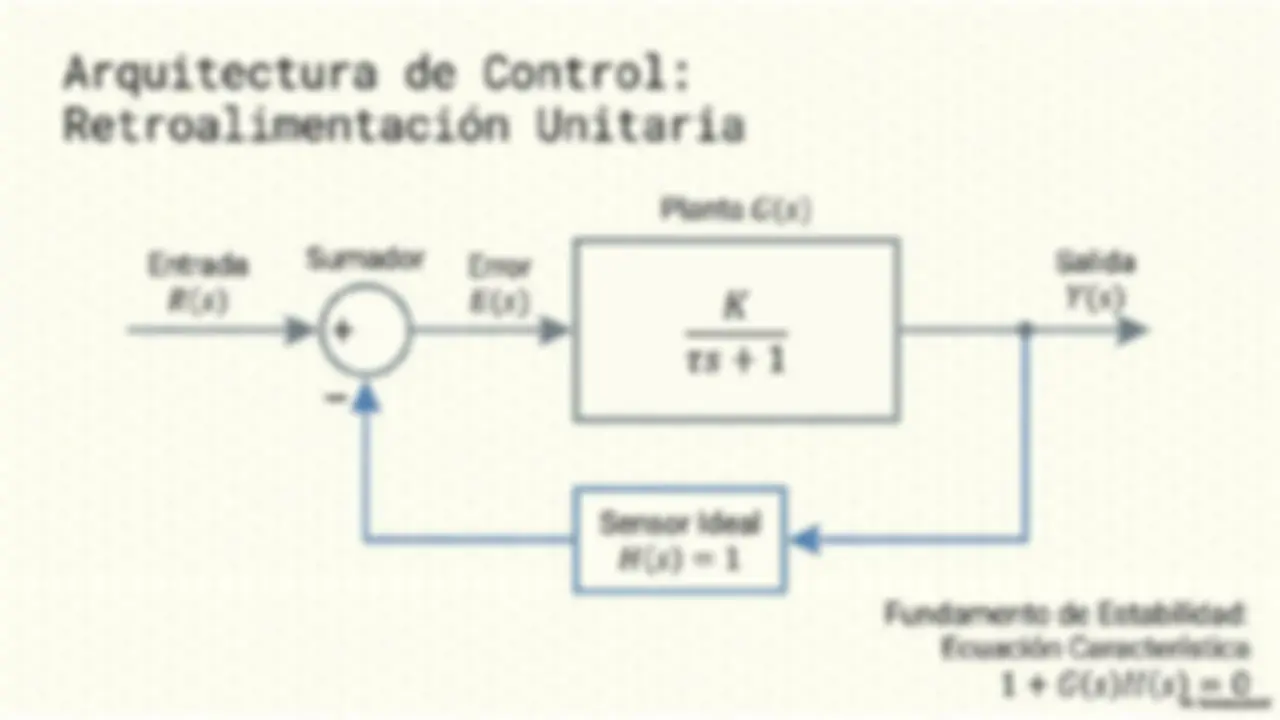
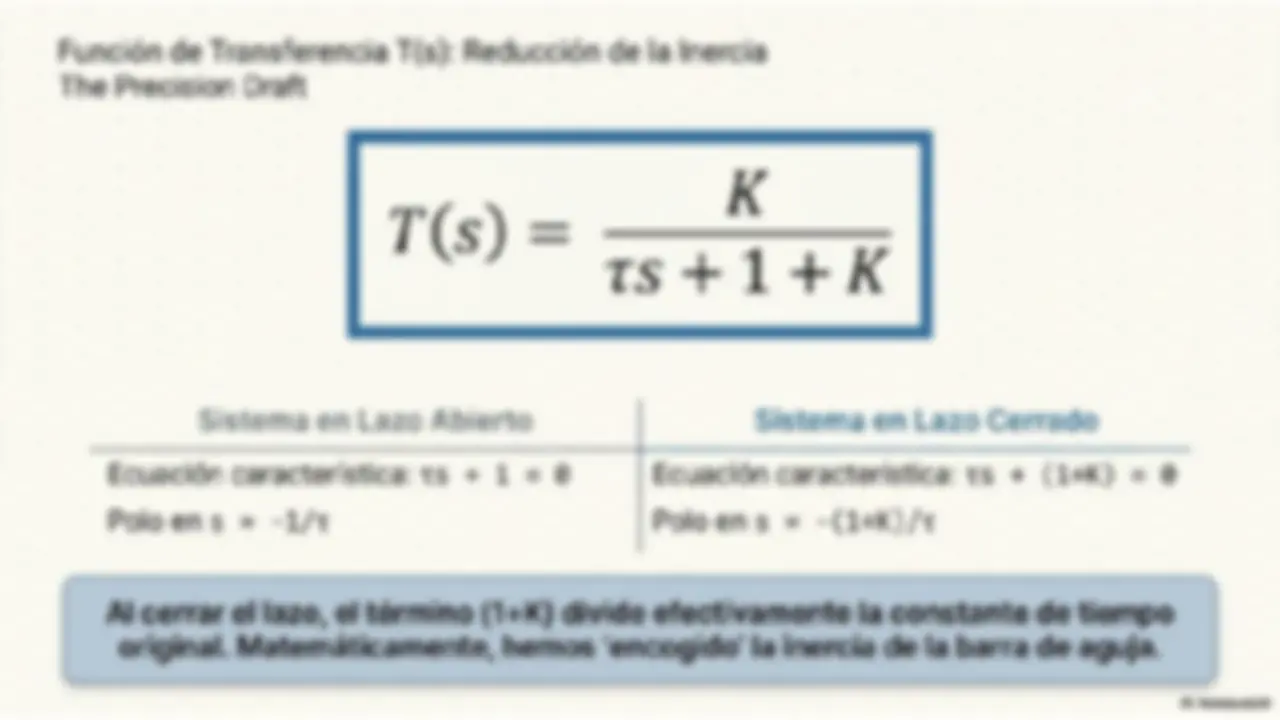
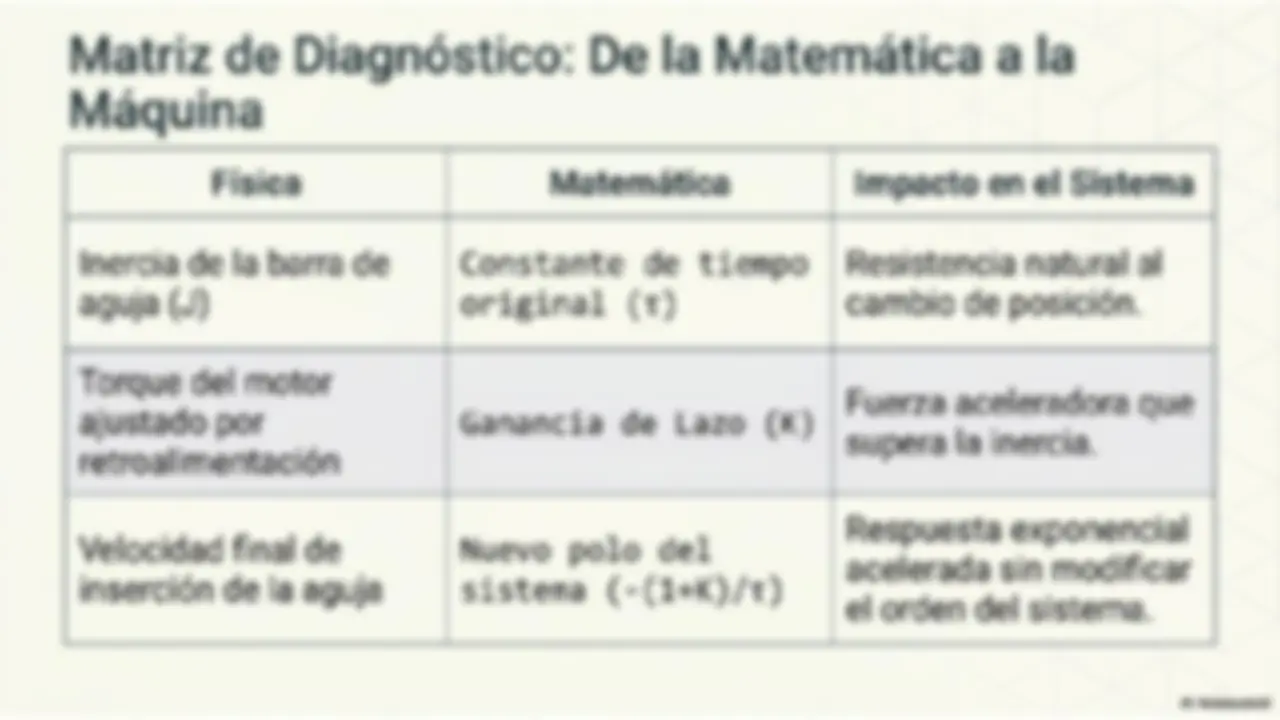
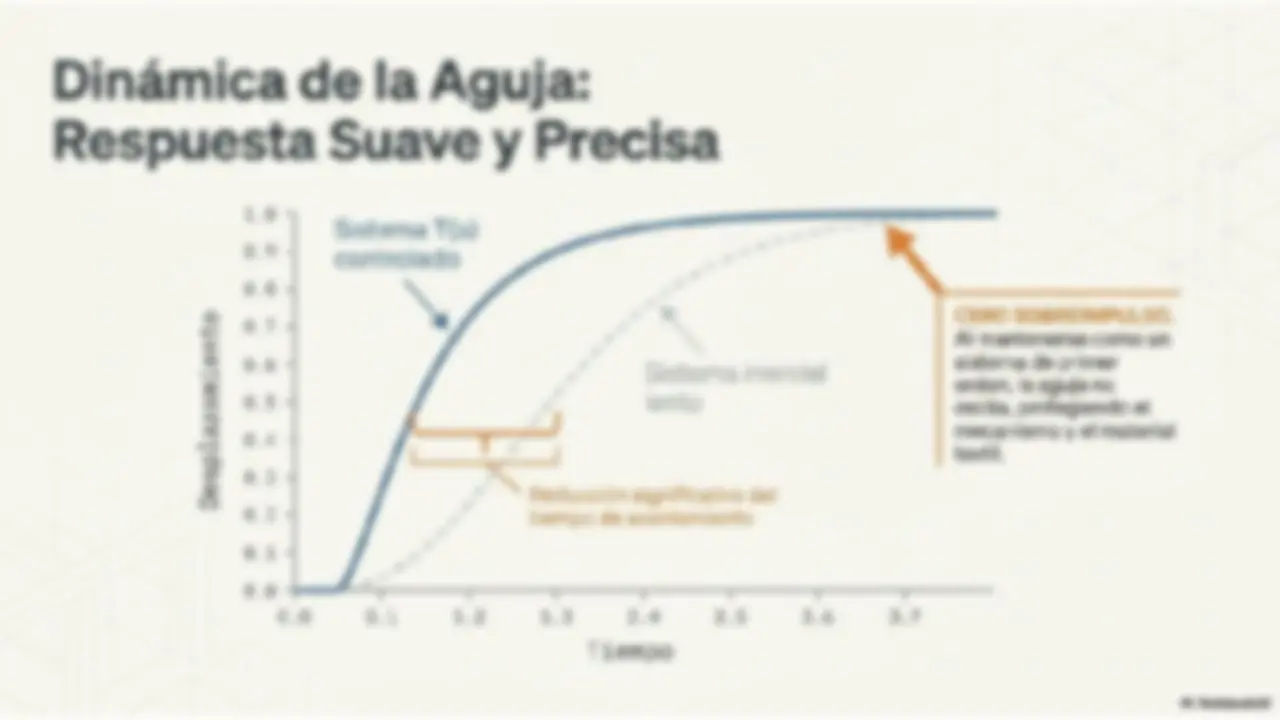
Modelado y Control de un Sistema de Barra de Aguja: Análisis de Primer Orden Defensa Técnica de Ingeniería Mecánica Crank ATADO YA AVAVAVA VAN] |, Coupl li WWA Y A oupling / L-. AS =] Me K Ll Hl ai mm] 7+s+1 ll DC Motor i A Needle Bar / V Física > Abstracción Matemática > Resolución > Estabilidad An NotebookLM El Sistema Fisico: Precisión frente a Inercia Parámetros del Desafío Actuador: Motor de Corriente Continua. Carga: Barra de aguja (mecanismo de traslación rápida). Objetivo Crítico: Movimiento posicional rápido, suave y estrictamente SIN OSCILACIONES (para evitar rotura de hilo o daño al material). Ar NotebookLM Comportamiento en Lazo Abierto: Análisis de T Amplitud 63.2% del valor final + ll p======-=--- T Tiempo (t) La respuesta libre y forzada demuestran un sistema inherentemente estable (sin oscilaciones), pero mecánicamente LENTO. Se requiere cerrar el lazo para manipular dinámicamente la constante de tiempo. An NotebookLM Arquitectura de Control: Retroalimentación Unitaria Planta G(s) Entrada Sumador Error Salida R(s) E(s) Sensor Ideal His) =1 Fundamento de Estabilidad: Ecuación Característica 1+G(sSH(s) =0 An NotebookLM Resolución del Lazo: Fórmula de Ganancia de Mason Y PLA A Paso 1: Camino Directo (P_1) K A E (La energía que impulsa la aguja) TS +1 Paso 2: Lazos Individuales (L_1) K K Sy, e | * (-1) = (La restricción correctiva) Tel ar dl AS, Paso 3: Determinante (A) K A=1=(L1=1 (L-1) ES A) Sustituyendo valores —> el denominador se transforma. Ar NotebookLM Función de Transferencia T(s): Reducción de la Inercia The Precision Draft Sistema en Lazo Abierto Sistema en Lazo Cerrado Ecuación característica: 1s + 1 = 0 Ecuación característica: 1s + (1+K) = 0 Poloens = -1/t Poloens = -(1+K)/T Al cerrar el lazo, el término (1+K) divide efectivamente la constante de tiempo original. Matemáticamente, hemos '“encogido' la inercia de la barra de aguja. Ar NotebookLM Dinámica de la Aguja: Respuesta Suave y Precisa Desplazamiento AL OO] o 00 | O 1.0 SO O 00.0 (88) | Sistema T(s) controlado CERO SOBREIMPULSO. Al mantenerse como un sistema de primer orden, la aguja no oscila, protegiendo el mecanismo y el material textil. Sistema inercial lento Á Reducción significativa del tiempo de asentamiento 0.1 1.2 103 2.4 2.5 3.6 37 Tiempo Ar NotebookLM Verificación de Estabilidad Absoluta en el Plano S = Raíz de la Ecuación Característica: s = —(1+K)/t = Demostración: Dado que los | parámetros físicos (masa, fricción, torque) y la ganancia K son estrictamente positivos, s = -(14+K)/t el polo siempre residirá en el semiplano izquierdo real. La oscilación (jw x 0) es matemáticamente imposible. Estabilidad incondicional garantizada. An NotebookLM