¡Descarga sistemas mecanicos modelado y más Ejercicios en PDF de Dinámica de sistemas solo en Docsity!
Juan Camilo Alarcon Jaramillo
Trabajo 2
a=2 b=2 c=
B1= 4 Kg/s B2= 8 lb/s= 3.62874Kg/s m1=10 lb= 4.53592kg
m2= 3 Kg m3=4kg K=K1= 75N/m K2= 100N/m
1. Obtener el circuito mecánico equivalente, hallar la función de transferencia, el
diagrama de polos y ceros y la respuesta x 2(t)
con el uso de fracciones parciales. Comprobar
la respuesta haciendo la comparación de la gráfica de la ecuación obtenida con una de
Simulink.
Nodo
Nodo
Se le aplica la transformada de Laplace a las dos ecuaciones
m 1
m 2
K
F(t)
V 1
V 2
Juan Camilo Alarcon Jaramillo
Remplazando los valores
[(
)] ∗ 𝑠
[(
2
2
)]
2
2
4
3
2
3
2
2
4
3
2
[(
4
3
2
2
))]
2
4
3
2
2
3
2
2
3
2
2
3
2
Juan Camilo Alarcon Jaramillo
figure(1)
n=[33.3 29.3 551.1]
d=[1 2.091 42.598 42.044 0 0]
impulse(n,d)
title ('Funcion de transferencia')
grid on
xlabel('Tiempo[seg]')
ylabel('Distancia[Metros]'
Sacando los polos de la ecuación se encuentran los coeficientes de los valores de s del
denominador para realizar las fracciones parciales.
2
2
𝐺 2 =∗
- 3 ∗ 𝑠
2
(𝑠
2
)(𝑠 + 0. 5393 − 6. 4199 𝑖)(𝑠 + 0. 5393 + 6. 4199 𝑖)(𝑠 + 1. 0130 )
=
𝑎
𝑠
𝑏
𝑠
2
𝑐
𝑠 + 1. 0130
𝑑
𝑠 + 0. 5393 − 6. 4199 𝑖
𝑒
𝑠 + 0. 5393 + 6. 4199 𝑖
[
2
2
]
𝑠= 0
[
2
2
]
𝑠= 0
Juan Camilo Alarcon Jaramillo
𝑐 = [
2
2
2
]
𝑠=− 1. 0130
𝑑 = [
2
2
]
𝑠=− 0. 5393 + 6. 4199 𝑖
𝑒 = [
2
2
]
𝑠=− 0. 5393 − 6. 4199 𝑖
𝑥 2 =
- 1077
𝑠
- 582
𝑠
2
- 065
𝑠 + 1. 0130
− 0. 2413 − 0. 0103 𝑖
𝑠 + 0. 5393 − 6. 4199 𝑖
− 0. 2413 + 0. 0103 𝑖
𝑠 + 0. 5393 + 6. 4199 𝑖
ℒ
− 1
[𝑥 2 ] = ℒ
− 1
[
- 1077
𝑠
] + ℒ
− 1
[
- 582
𝑠
2
] + ℒ
− 1
[
- 065
𝑠 + 1. 0130
] + ℒ
− 1
[
− 0. 2413 − 0. 0103 𝑖
𝑠 + 0. 5393 − 6. 4199 𝑖
] + ℒ
− 1
[
− 0. 2413 + 0. 0103 𝑖
𝑠 + 0. 5393 + 6. 4199 𝑖
]
𝑥 2
( 𝑡
) = 13. 1077 + 12. 582 ∗ 𝑡 + 13. 065 ∗ ℯ
− 1. 0130
− 0. 2413 − 0. 0103 𝑖 ∗ ℯ
− 0. 5393 + 6. 4199 𝑖∗𝑡
− 0. 2413 + 0. 0103 𝑖 ∗ ℯ
− 0. 5393 − 6. 4199 𝑖∗𝑡
Desarrollando los términos que tienen números complejos
− 0. 5393 + 6. 4199 𝑖∗𝑡
− 0. 5393 − 6. 4199 𝑖∗𝑡
= − 0. 2413 ℯ
− 0. 5393 ∗𝑡
ℯ
- 4199 𝑖∗𝑡
− 0. 0103 𝑖ℯ
− 0. 5393 ∗𝑡
ℯ
- 4199 𝑖∗𝑡
− 0. 2413 ℯ
− 0. 5393 ∗𝑡
ℯ
− 6. 4199 𝑖∗𝑡
− 0. 0103 𝑖ℯ
− 0. 5393 ∗𝑡
ℯ
− 6. 4199 𝑖∗𝑡
− 0. 5393 ∗𝑡
- 4199 𝑖∗𝑡
− 6. 4199 𝑖∗𝑡
− 0. 5393 ∗𝑡
- 4199 𝑖∗𝑡
− 6. 4199 𝑖∗𝑡
− 0. 5393 ∗𝑡
- 4199 𝑖∗𝑡
− 6. 4199 𝑖∗𝑡
− 0. 5393 ∗𝑡
- 4199 𝑖∗𝑡
− 6. 4199 𝑖∗𝑡
− 0. 5393 ∗𝑡
- 4199 𝑖∗𝑡
− 6. 4199 𝑖∗𝑡
− 0. 5393 ∗𝑡
- 4199 𝑖∗𝑡
− 6. 4199 𝑖∗𝑡
− 0. 5393 ∗𝑡
∗ cos ( 6. 4199 𝑡) −
− 0. 5393 ∗𝑡
∗ sen( 6. 4199 𝑡)
𝑥 2 (𝑡) = 13. 1077 + 12. 582 ∗ 𝑡 + 13. 065 ∗ ℯ
− 1. 0130
2413
5000
ℯ
− 0. 5393 ∗𝑡
∗ cos ( 6. 4199 𝑡) −
103
5000
ℯ
− 0. 5393 ∗𝑡
∗ sen( 6. 4199 𝑡)
Juan Camilo Alarcon Jaramillo
2. Modelar el sistema de la figura obteniendo las funciones de transferencia y el modelo
en variables de estado si la entrada es:
Entrada x 3(t)
3 (𝑡)
[
]
Nodo 1
3
2
2
Nodo
2
2
Aplicando la transformada de Laplace
3
2
2
Remplazando
3
2
Juan Camilo Alarcon Jaramillo
Simplificando Nodo
3
2
Simplificando Nodo
2
Agrupando términos
Nodo
3
2
3
2
3
2
Nodo
2
2
Se meten los coeficientes de x1,x2 y los términos independientes
[(
2
2
3
)]
Se operan los valores de la matriz
2
2
4
3
2
3
2
2
4
3
2
Se obtienen los valores de x
[(
4
3
2
3
))]
Se despeja x
3
4
3
2
Se despeja la entrada y se obtiene la función de transferencia
3
4
3
2
Juan Camilo Alarcon Jaramillo
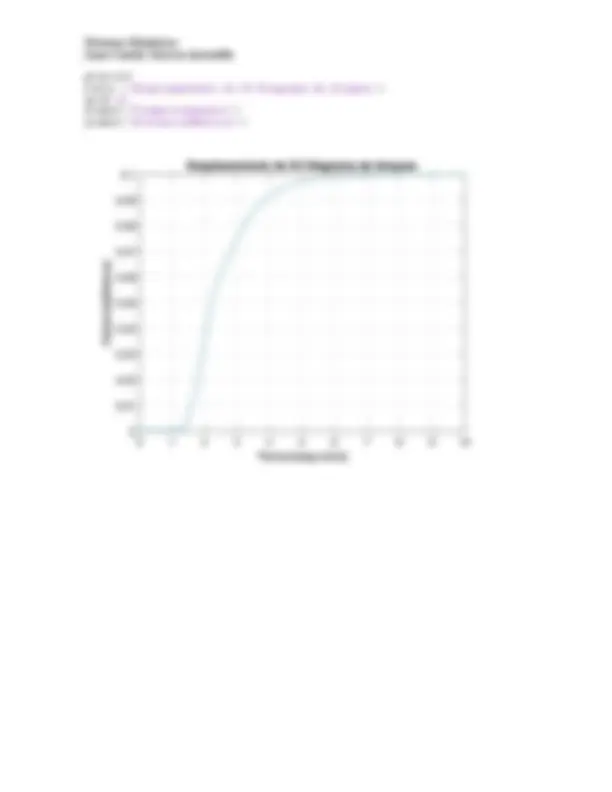
plot(x1)
title ('Desplazamiento de X1 con F.T')
grid on
xlabel('Tiempo[segundos]')
ylabel('Distancia[Metros]')
Juan Camilo Alarcon Jaramillo
plot(x2)
title ('Desplazamiento de X2 con F.T')
grid on
xlabel('Tiempo[segundos]')
ylabel('Distancia[Metros]')
Variables de estado
Tomando la ecuación del nodo 1
3
2
2
Destruyendo paréntesis
3
2
2
Despejando obtenemos la primera variable de estado
3
2
2
Juan Camilo Alarcon Jaramillo
[
]
[
]
= [
] +
[
]
[
] = [
] = [
] + [
] 𝑥𝑖𝑛 -
Juan Camilo Alarcon Jaramillo
3. Obtener el diagrama de bloques del sistema mecánico, hallar la función de transferencia
mediante simplificaciones del diagrama y simular para la entrada F (t)
= 10(1 - e
) N
F(t)=32N
s
Nodo
2
2
Nodo
2
2
Nodo
2
2
Remplazando por los valores
Nodo
2
2
2
2
2
2
Juan Camilo Alarcon Jaramillo
Retroalimentación
Juan Camilo Alarcon Jaramillo
Desplazar puntos a la derecha
Bloques en serie y retroalimentación
Diagrama Simplificado
Juan Camilo Alarcon Jaramillo
4. Simular el sistema mecánico de la figura obteniendo la velocidad angular y la posición
de m3. Si la carga es una fuerza de 2 Kg que se ejerce sobre la pieza a pulir en el esmeril.
K1 = 3500 N/rad. K2 = 2500 N/rad. B1= 4 Kgm
2
/s. B2 = 8 Kgm
2
/s. m1 = 4 lb= 1.81437;
m2= 1 Kg, m3 = 8 lb=3.628kg. D = 12 in, d = 7.5 in, R =16cm
El motor eléctrico tiene una función de transferencia
𝑚
Con tensión nominal de entrada 120 Vrms y salida velocidad angular.
Nodo
𝑚
1
1
1
Nodo
2
2
1
2
Juan Camilo Alarcon Jaramillo
Nodo
1
3
3
Remplazando los valores en el nodo 1
𝑚
1
1
1
Remplazando los valores en el nodo 2
2
2
1
3
Reemplazando los valores en el nodo 3
1
3
3
Nodo
𝑚
1
1
1
1
Despejando la mayor derivada
1
𝑚
1
1
1
Remplazando valores
1
𝑚
1
1
1
Nodo 2
2
2
2
2
3
Remplazando valores
2
2
2
2
3
Nodo 3
2
3
3