¡Descarga Técnicas básicas de búsqueda: Busqueda en anchura y profundidad y más Apuntes en PDF de Ciencias de la Educación solo en Docsity!
Inteligencia Artificial I Curso 2010–
Tema 3: T´ecnicas b´asicas de
b´usqueda
Jos´e Antonio Alonso Jim´enez Francisco Jes´us Mart´ın Mateos Jos´e L. Ruiz Reina
Dpto. de Ciencias de la Computaci´on e Inteligencia Artificial Universidad de Sevilla
B´usqueda de soluciones en espacios de estados
x Objetivo: encontrar una secuencia de operadores que, partiendo del es-
tado inicial, obtenga un estado final
x Idea b´asica: exploraci´on del grafo del espacio de estados
u (^) En cada momento se analiza un estado actual (en un principio, el inicial) u (^) Si el estado actual es final, acabar (recopilando la sucesi´on de operadores) u (^) En caso contrario, obtener los sucesores del estado actual (expandir) u (^) Elegir un nuevo estado actual, dejando los restantes para analizarlos posteriormente (si fuera necesario) u (^) Repetir el proceso mientras haya estados por analizar
x La elecci´on del estado actual en cada momento determina una estrategia
de b´usqueda
Arboles de b´´ usqueda
x Nodo de un ´arbol de b´usqueda, componentes:
u (^) Estado u (^) Secuencia de operadores que conducen al estado desde el inicial (camino)
x Nodo ra´ız del ´arbol de b´usqueda: estado inicial + secuencia vac´ıa
x Nodos hoja del ´arbol de b´usqueda:
u (^) Nodos cuya expansi´on no ha producido sucesores nuevos u (^) Nodos pendientes de considerar (y expandir en su caso)
x Diferencias entre el espacio de estados y el ´arbol de b´usqueda:
u (^) Arbol vs. grafo u (^) Nodos del ´arbol de b´usqueda: estado + camino u (^) El ´arbol de b´usqueda se construye incrementalmente y refleja un proceso de b´usque- da sobre el grafo del espacio de estados
Implementaci´on de un problema de espacio de estados
x Elecci´on de una representaci´on (estructura de datos):
u (^) para los estados u (^) para los operadores
x La implementaci´on de un problema como espacio de estados consta de:
u (^) Una variable global ESTADO-INICIAL u (^) Una funci´on ES-ESTADO-FINAL(ESTADO) u (^) Una variable global OPERADORES. u (^) Una funci´on APLICA(OPERADOR,ESTADO)
x La funci´on APLICA(OPERADOR,ESTADO):
u (^) Devuelve NO-APLICABLE si OPERADOR no es aplicable a ESTADO u (^) En caso contrario, devuelve el estado resultante de aplicar OPERADOR a ESTADO
Implementaci´on de un procedimiento general de b´usqueda
FUNCION BUSQUEDA-GENERAL()
- Hacer ABIERTOS la "cola" formada por el nodo inicial (es decir, el nodo cuyo estado es ESTADO-INICIAL y cuyo camino es vac´ıo); Hacer CERRADOS vac´ıo
- Mientras que ABIERTOS no est´e vac´ıa, 2.1 Hacer ACTUAL el primer nodo de ABIERTOS 2.2 Hacer ABIERTOS el resto de ABIERTOS 2.3 Poner el nodo ACTUAL en CERRADOS. 2.4 Si ES-ESTADO-FINAL(ESTADO(ACTUAL)), 2.4.1 devolver el nodo ACTUAL y terminar. 2.4.2 en caso contrario, 2.4.2.1 Hacer NUEVOS-SUCESORES la lista de nodos de SUCESORES(ACTUAL) cuyo estado no est´a ni en ABIERTOS ni en CERRADOS 2.4.2.2 Hacer ABIERTOS igual a GESTIONA-COLA(ABIERTOS,NUEVOS SUCESORES)
- Devolver FALLO.
Implementaci´on de un procedimiento general de b´usqueda
x La implementaci´on anterior es independiente del problema
x ABIERTOS puede verse como una “cola” en la que esperan los nodos para
ser analizados
x CERRADOS contiene los nodos ya analizados:
u (^) Permite no iniciar la b´usqueda en estados analizados
u (^) En particular, nos permite evitar ciclos en el proceso de b´usqueda
u (^) En determinados problemas es prescindible
x La funci´on GESTIONA-COLA(ABIERTOS,NUEVOS SUCESORES):
u (^) A˜nade NUEVOS-SUCESORES a ABIERTOS, reordenando seg´un alg´un criterio concreto
u (^) Distintas concreciones de esta funci´on dan lugar a distintos algoritmos de b´usqueda (estrategias de b´usqueda) u (^) B´usqueda no informada o ciega vs. b´usqueda informada
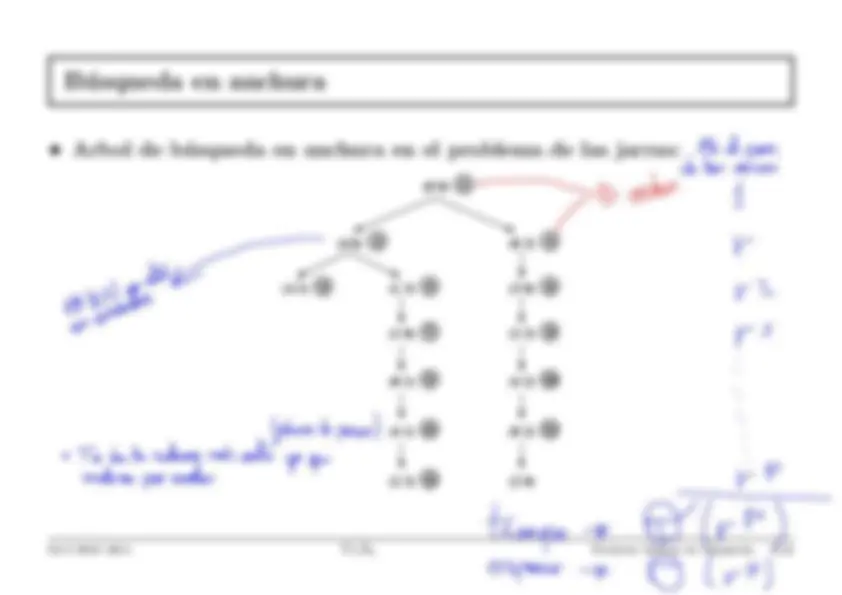
B´usqueda en anchura
x Arbol de b´usqueda en anchura en el problema de las jarras:
(0 0) 1
(4 3) 4 5
(1 0) 7
(0 1) 9
(4 1) 11
(2 3) 13
(1 3) (3 0) 6
(3 3) 8
(4 2)
(0 2) 12
(2 0)
10
(4 0) 2 (0 3) 3
B´usqueda en anchura
x Tabla de b´usqueda en anchura para el problema de las jarras:
Nodo Actual Sucesores Abiertos ((0 0)) 1 (0 0) ((4 0) (0 3)) ((4 0) (0 3)) 2 (4 0) ((4 3) (1 3)) ((0 3) (4 3) (1 3)) 3 (0 3) ((3 0)) ((4 3) (1 3) (3 0)) 4 (4 3) () ((1 3) (3 0)) 5 (1 3) ((1 0)) ((3 0) (1 0)) 6 (3 0) ((3 3)) ((1 0) (3 3)) 7 (1 0) ((0 1)) ((3 3) (0 1)) 8 (3 3) ((4 2)) ((0 1) (4 2)) 9 (0 1) ((4 1)) ((4 2) (4 1)) 10 (4 2) ((0 2)) ((4 1) (0 2)) 11 (4 1) ((2 3)) ((0 2) (2 3)) 12 (0 2) ((2 0)) ((2 3) (2 0)) 13 (2 3)
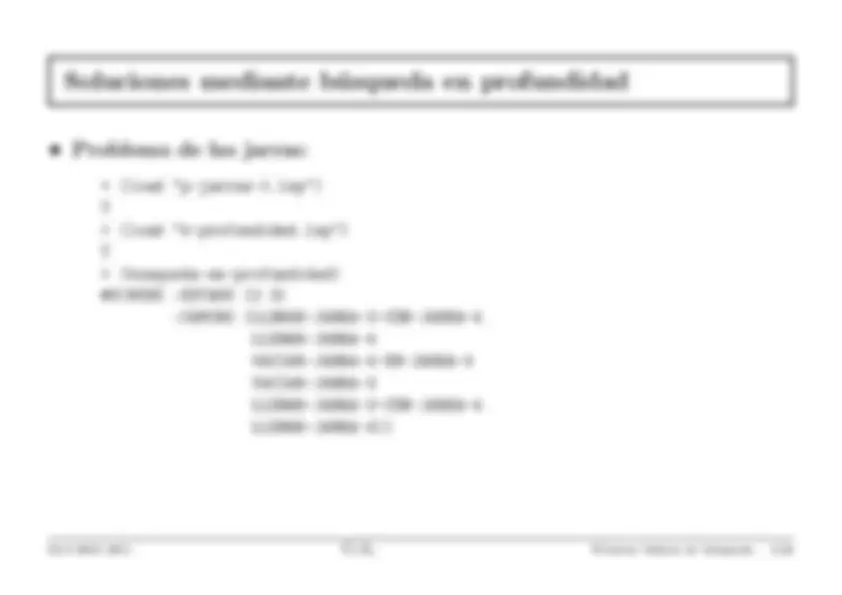
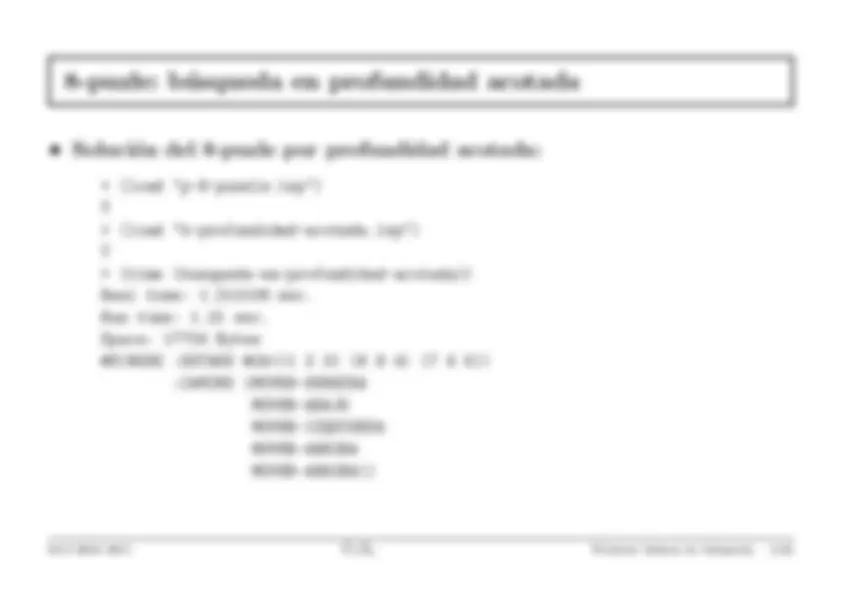
Soluciones de los problemas mediante b´usqueda anchura
x Problema de las jarras:
(load "p-jarras-1.lsp") T (load "b-anchura.lsp") T (busqueda-en-anchura) #S(NODO :ESTADO (2 3) :CAMINO (LLENAR-JARRA-3-CON-JARRA- LLENAR-JARRA- VACIAR-JARRA-4-EN-JARRA- VACIAR-JARRA- LLENAR-JARRA-3-CON-JARRA- LLENAR-JARRA-4))
Soluciones de los problemas mediante b´usqueda en anchura
(trace es-estado-final) (busqueda-en-anchura)
- Trace: (ES-ESTADO-FINAL ’(0 0))
- Trace: (ES-ESTADO-FINAL ’(4 0))
- Trace: (ES-ESTADO-FINAL ’(0 3))
- Trace: (ES-ESTADO-FINAL ’(4 3))
- Trace: (ES-ESTADO-FINAL ’(1 3))
- Trace: (ES-ESTADO-FINAL ’(3 0))
- Trace: (ES-ESTADO-FINAL ’(1 0))
- Trace: (ES-ESTADO-FINAL ’(3 3))
- Trace: (ES-ESTADO-FINAL ’(0 1))
- Trace: (ES-ESTADO-FINAL ’(4 2))
- Trace: (ES-ESTADO-FINAL ’(4 1))
- Trace: (ES-ESTADO-FINAL ’(0 2))
- Trace: (ES-ESTADO-FINAL ’(2 3))
(untrace)
Soluciones de los problemas mediante b´usqueda en anchura
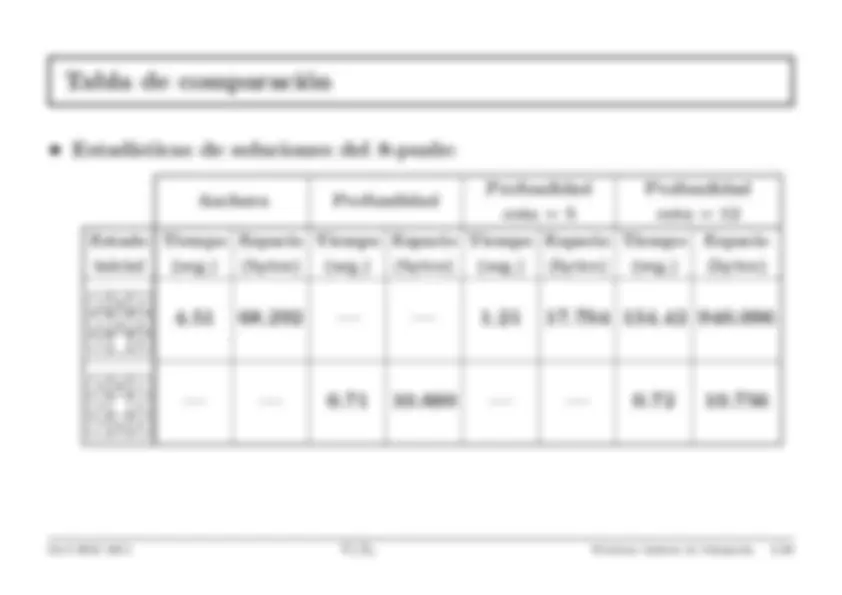
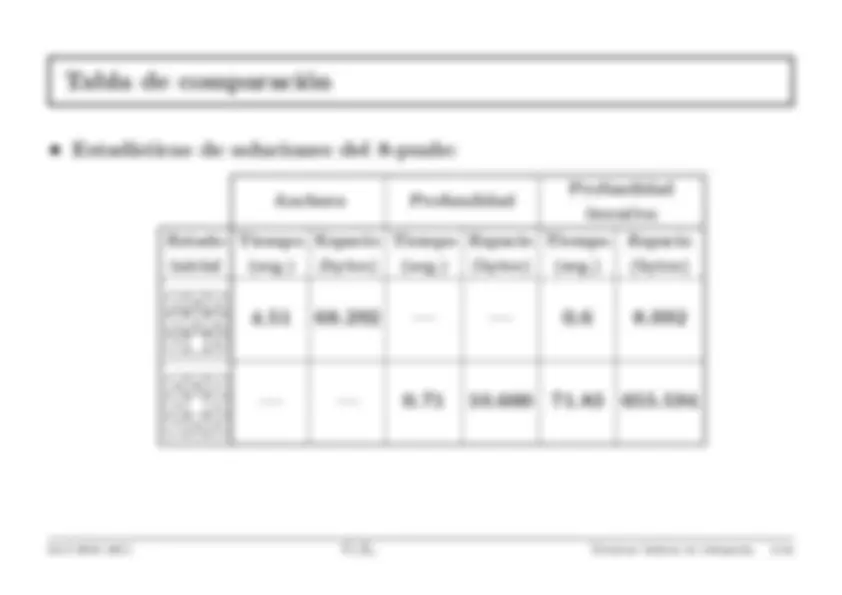
x Estad´ıstica de b´usqueda en anchura:
Tiempo Espacio Nodos M´aximo en Profundidad
(seg.) (bytes) analizados abiertos m´axima
Viaje 0.18 3.260 8 4 3
Granjero 0.18 3.432 10 2 7
Jarras 0.41 7.236 13 3 6
8-puzle 4.51 68.292 46 33 5
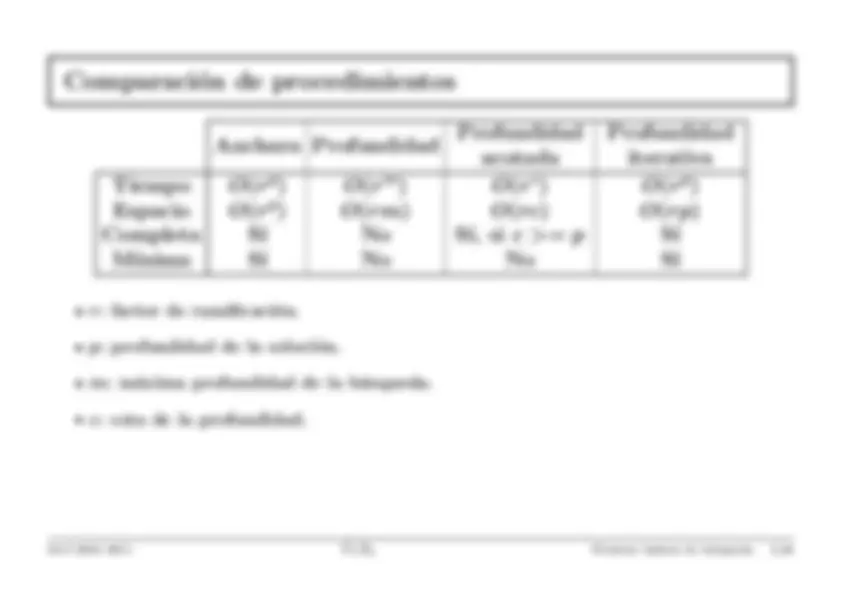
Propiedades de la b´usqueda en anchura
x Complejidad:
u (^) r: factor de ramificaci´on.
u (^) p: profundidad de la soluci´on.
u (^) Complejidad en tiempo: O(rp).
u (^) Complejidad en espacio: O(rp).
x Es completa.
x Obtiene una soluci´on con el m´ınimo n´umero de operadores.
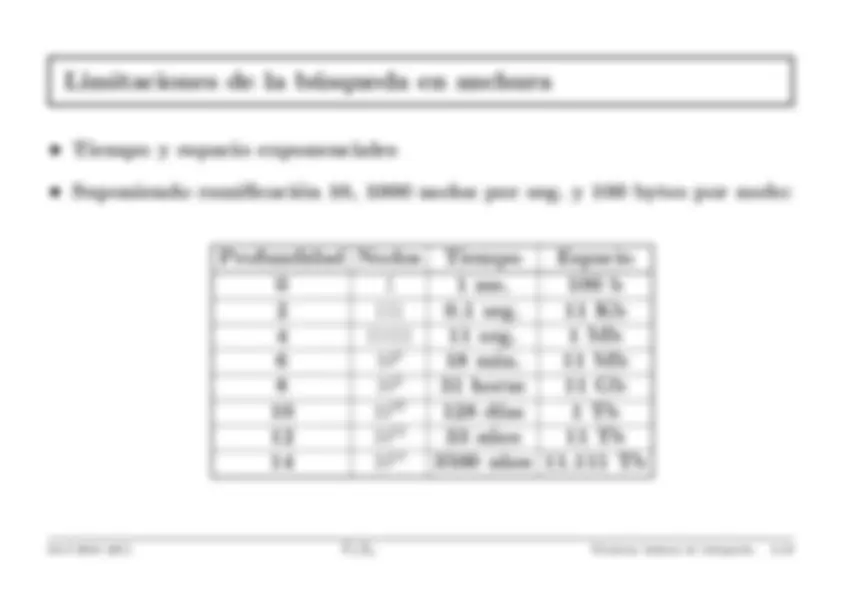
Limitaciones de la b´usqueda en anchura
x Tiempo y espacio exponenciales
x Suponiendo ramificaci´on 10, 1000 nodos por seg. y 100 bytes por nodo:
Profundidad Nodos Tiempo Espacio
0 1 1 ms. 100 b
2 111 0.1 seg. 11 Kb
4 11111 11 seg. 1 Mb
6 106 18 min. 11 Mb
8 108 31 horas 11 Gb
10 1010 128 d´ıas 1 Tb
12 1012 33 a˜nos 11 Tb
14 1014 3500 a˜nos 11.111 Tb
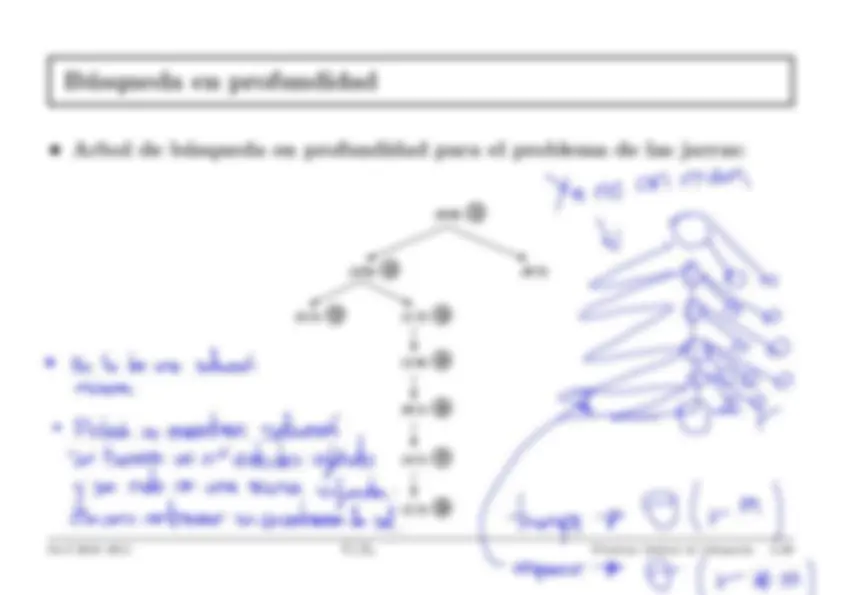
B´usqueda en profundidad
x Arbol de b´usqueda en profundidad para el problema de las jarras:
(0 0) 1
(4 3)
(1 0)
(0 1)
(4 1)
(2 3)
(1 3)
(4 0) 2 (0 3)
3 4
6
7
8
5