



Otto von Guericke Universität Magdeburg
Automatisierungstechnikpraktikum
Lineare Systeme
17. Juni 2015
Autoren
Pascal Bock
Marius Hörnschemeyer
Jakob Kübler
Marek Merten
Betreuer
Dr. Ing. Thomas Müller
































Besser lernen dank der zahlreichen Ressourcen auf Docsity

Heimse Punkte ein, indem du anderen Studierenden hilfst oder erwirb Punkte mit einem Premium-Abo

Prüfungen vorbereiten
Besser lernen dank der zahlreichen Ressourcen auf Docsity
Download-Punkte bekommen.
Heimse Punkte ein, indem du anderen Studierenden hilfst oder erwirb Punkte mit einem Premium-Abo
und PT2−Strecken anhand der Übertragungsfunktion! Wie erfolgt ... Regelkreises, bestehend aus PT2−Strecke und P−Regler! . . . . . 13.
Art: Leitfäden, Projektarbeiten und Recherchen
1 / 45

Diese Seite wird in der Vorschau nicht angezeigt
Lass dir nichts Wichtiges entgehen!
Inhaltsverzeichnis
1 Grundlagen 3 1.1 Versuchsziel................................... 3 1.2 Vorbereitungsfragen.............................. 3 1.2.1 Was sind Sprungantwort und Übergangsfunktion?......... 3 1.2.2 Was ist die Gewichtsfunktion?.................... 3 1.2.3 Was ist der Frequenzgang eines Übertragungssystems? Welcher Zusammenhang besteht zwischen Übertragungsfunkion und Fre- quenzgang? Verbinden Sie damit eine physikalische Bedeutung!.. 3 1.2.4 Was ist eine Phasenminimumsystem................. 3 1.2.5 Was sind Ortskurve und Bodediagramm?.............. 4 1.2.6 Nennen Sie die Grundtypen linearer dynamischer Übertragungs- glieder und skizzieren Sie deren ideale und reale Zeitverläufe(Sprungantworten)! 4 1.2.7 Ordnen Sie reale physikalische Systeme diesen Grundtypen zu!.. 4 1.2.8 Wodurch wird die Ordnung eines Systems bestimmt? Wie schlägt sich das in der Differenzialgleichung und im Frequenzgang nieder? 5 1.2.9 Welche Möglichkeiten der Zusammenschaltung linearer Übertra- gungsglieder kennen Sie und wie erfolgt diese Zusammenfassung mathematisch?............................. 5 1.2.10 Geben Sie Differenzialgleichung, Übertragungsfunktion und Fre- quenzgang für folgende Streckentypen an: P T 1 , P T 2 , IT und DT 1! Ermitteln Sie analytisch den Näherungsamplitudenfrequenzgang sowie den Phasenverlauf und stellen Sie die Ergebnisse qualitativ dar!................................... 5 1.2.11 Skizzieren Sie die Ortskurve der in Aufgabe 2 angegebenen Grund- glieder!................................. 6 1.2.12 Geben Sie die Übergangsfunktionen der in Aufgabe 2 betrachteten Systeme an!............................... 8 1.2.13 Informieren Sie sich über Methoden der Identifikation von P T 1 − und P T 2 −Strecken anhand der Übertragungsfunktion! Wie erfolgt die Bestimmung der Streckenparameter?............... 9 1.2.14 Wie ermittelt man die Parameter von IT n −Strecken an der Über- tragungsfunktion?........................... 10 1.2.15 Welche Testsignale sind zur Identifikation von DT 1 −Gliedern ge- eignet? Wie ermittelt man aus dem entsprechenden Zeitverläufen die Kennwerte des DT 1 −Gliedes?................... 11 1.2.16 Ermitteln Sie analytisch die Dämpfung D und die Zeitkonstante T 0 des Regelkreises bestehend aus I−Regler G R (s) = K sI = (^) T^11 s und P T 1 −Strecke G S (s) = (^) TSK sS +1 als Funktionen von T S , K S und K 1 = 1 T 1! Wie sind^ T S^ ,^ K S^ und^ K^1 zu wählen, damit sich bestimmte Werte für D und T 0 einstellen lassen?................ 12
1 Grundlagen
Es wird das dynamische Verhalten linearer Systeme untersucht. Dabei sollen Sprungant- worten und Frequenzgänge als Bodediagramm und Ortskurve sowohl aufgenommen als auch ausgewertet werden.
1.2.1 Was sind Sprungantwort und Übergangsfunktion?
Die Sprungantwort ist die Antwort eines System auf eine sprungförmige Veränderung des Eingangssignals u(t) = ˆx e σ(t). Die Übergangsfunktion h(t) stellt die Reaktion des Systems auf einen Sprung bezogen auf dessen Höhe dar.
h(t) =
xˆ e x a (t) (PA1-1)
Dabei ist xˆ e die Höhe des Sprungs und x a (t) die Antwort des Systems.
1.2.2 Was ist die Gewichtsfunktion?
Die Gewichtsfunktion g(t) ist die Reaktion eines Systems an dessen Ausgang auf einen (Dirac-)Impuls δ(t) am Eingang.
δ(t) =
{ 0 , t 6 = 0 1 t , t^ = 0^
1.2.3 Was ist der Frequenzgang eines Übertragungssystems? Welcher Zusammenhang besteht zwischen Übertragungsfunkion und Frequenzgang? Verbinden Sie damit eine physikalische Bedeutung!
Der Frequenzgang ist die Antwort eines Übertragungssystems auf eine harmonische Schwingung mit der Frequenz ω. Es handelt sich also um eine komplexe Zahl (δ + jω) in Abhängigkeit von ω und mit δ = 0. Die Übertragungsfunktion G(s) = G(δ + jω) geht im Sonderfall δ = 0 in den Frequenz- gang G(jω) über und ist somit die mathematische Funktion, welche die Frequenz ω mit dem Ausgang, dem Frequenzgang, des Übertragungssystems verbindet. Das periodische Anstoßen eines Pendels kann als Anregung mit einer Frequenz w inter- pretiert werden, die Auslenkung des Pendels als Ausgang des Übertragungssystems.
1.2.4 Was ist eine Phasenminimumsystem
Ein System ist minimalphasig, wenn es (grenz-)stabil ist und der Zähler seiner Übertra- gungsfunktion keine positive Nullstellen aufweist. Es ist möglich aus dem Phasen- oder Amplitudenverlauf auf den jeweils anderen zu schließen. Der ermittelte Phasengang ist
der betragsmäßig kleinste zu ermittelnde Phasengang bei vorgegebenen Amplitudenver- lauf A(ω).
1.2.5 Was sind Ortskurve und Bodediagramm?
Ortskurve und Bodediagramm sind Darstellungsarten des Frequenzganges eines Systems. Die Ortskurve wird auf der komplexen Zahlenebene aufgetragen und geht von der Fre- quenz ω → −∞ bis zu ω → ∞. In den Ingenieurswissenschaften wird häufig nur der Verlauf ω ∈ [0, ∞[ betrachtet. Es sind nur Amplitude und Winkel der komplexen Zahl abzulesen, aber der genau Zusammenhang G(jω) kann nicht entnommen werden. Das Bodediagramm besteht genau genommen aus zwei Diagrammen: Eines für die Am- plitude A(ω) der komplexen Zahl in Abhängigkeit von der Frequenz und eines für den Phasenwinkel ϕ(ω). Typischerweise wird die Amplitude in Dezibel und die Frequenz logarithmisch aufgetragen.
1.2.6 Nennen Sie die Grundtypen linearer dynamischer Übertragungsglieder und skizzieren Sie deren ideale und reale Zeitverläufe(Sprungantworten)!
Die Grundtypen der linearer dynamischen Übertragungsglieder sind das P -, I-, D- und T t -Glied. Das P -Glied weist in proportionales Verhalten auf, der Eingang wird proportional ver- stärkt oder erniedrigt. Ein I-Glied zeigt integrales Verhalten und integriert den Eingang auf, im zeitdiskreten ist diese Integration eine Addition der einzelnen Werte. Genau umgekehrtes Verhalten zeigt das D-Glied. Dessen Ausgang ist anhängig von der Änderung des Eingangs (differenzielles Verhalten). Ein ideales D-Glied (G(s) = s) ist physikalisch nicht zu realisieren, da die Amplitude des Ausgangs für eine beliebig hohe Frequenz auch ein beliebig hoch wäre. Totzeiten können durch das sogenannte T t -Glied dargestellt werden.
Abbildung PA1-2: Sprungantworten von D- und T t -Glied
1.2.7 Ordnen Sie reale physikalische Systeme diesen Grundtypen zu!
P −Glied: idealer Transistor, Servo-Lenkung, Durchflussregelung mittels Schieber I−Glied: ein Wasserbehälter ohne Ablauf integriert seinen Eingang (Volumenstrom) auf D−Glied: die Widerstandskraft eines nichtnewtonschen Fluid gegenüber der Beschleu- nigung eines Körpers in diesem T t −Glied: eine Rohrstrecke sorgt für eine Verzögerung innerhalb eines stofflichen Über-
tragungssystems
1.2.8 Wodurch wird die Ordnung eines Systems bestimmt? Wie schlägt sich das in der Differenzialgleichung und im Frequenzgang nieder?
Die Ordnung des System gibt die Anzahl der Speicherelemente an. Wenn das System als lineare Differenzialgleichung dargestellt wird, entspricht die Ord- nung eines System der höchsten Ableitung. Im Frequenzbereich entspricht die Ordnung des System der höchsten Potenz des Nennerpolynoms.
1.2.9 Welche Möglichkeiten der Zusammenschaltung linearer Übertragungsglieder kennen Sie und wie erfolgt diese Zusammenfassung mathematisch?
Lineare Übertragungsglieder: G 1 (s), G 2 (s) (PA1-3) In Reihe: Y (s) = G 1 (s) · G 2 (s) (PA1-4) Parallel: Y (s) = G 1 (s) + G 2 (s) (PA1-5)
Feedback-Loop: Y (s) = G 1 (s) 1 + G 1 (s)G 2 (s)
Feedforward-Loop: Y (s) = G 1 (s) 1 − G 1 (s)G 2 (s)
1.2.10 Geben Sie Differenzialgleichung, Übertragungsfunktion und Frequenzgang für folgende Streckentypen an: P T 1 , P T 2 , IT und DT 1! Ermitteln Sie analytisch den Näherungsamplitudenfrequenzgang sowie den Phasenverlauf und stellen Sie die Ergebnisse qualitativ dar!
Streckentyp Differenzialgleichung Übertragungsfunktion Frequenzgang
P T 1 T y˙ + y = Ku G(s) = (^) sTK +1 G(jω) = (^) 1+ KjT ω
P T 2 T 02 y˙˙ + 2DT 0 y˙ + y = Ku G(s) = (^) T 2 K 0 s^2 +2 DT^0 s +^
G(jω) = (^1) − T 2 K 0 ω^2 + j^2 DT^0 ω IT T y˙˙ + ˙y = Ku G(s) = (^) s ( sTK +1) G(jω) = (^) jω (1+ KjT ω )
DT 1 T y˙ + y = K u˙ G(s) = (^) sTKs +1 G(jω) = (^) 1+ KjωjT ω
Um den Amplituden- und Phasenverlauf darzustellen, muss die komplexe Funktion G(jω) in ihren Betrag | G(jω) | und ihren Winkel arg{G(jω)} zerlegt werden.
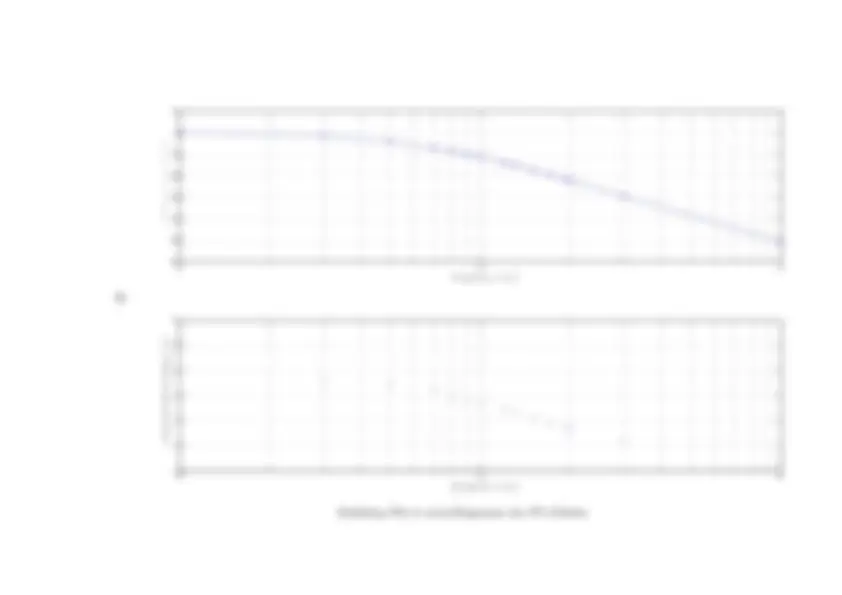
Abbildung PA1-3: Näherungsamplitudenfrequenzgang von P T 1 - und P T 2 -Glied
Abbildung PA1-4: Näherungsamplitudenfrequenzgang von IT- und DT-Glied
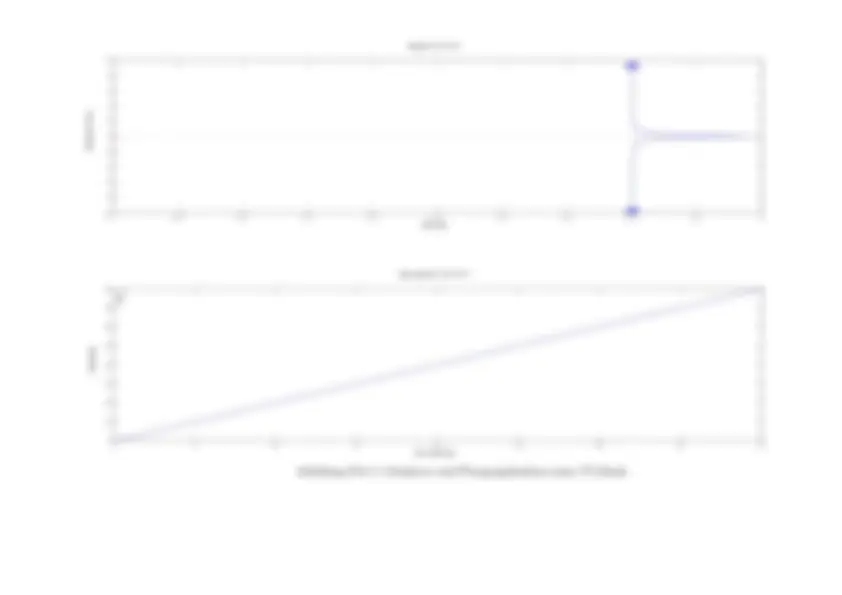
1.2.11 Skizzieren Sie die Ortskurve der in Aufgabe 2 angegebenen Grundglieder!
−^6
−^4
−^2
0
2
4
6
− − (^10) − (^15) − 20 20 15 10 5 0 5
Nyquist: K=2 ;T=1 ;D=0.
Real Axis
Imaginary Axis
0
10
20
30
40
50
60
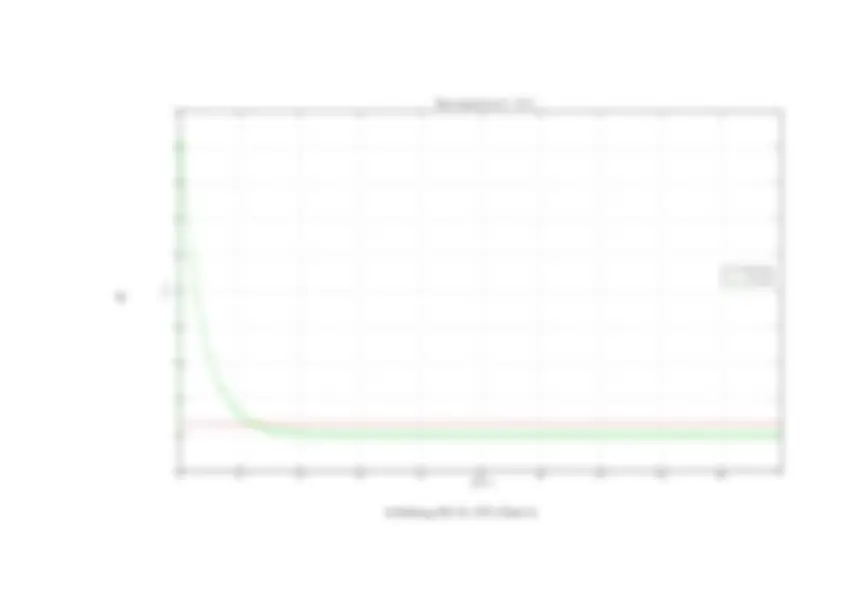
(^4) 3.5 (^3) 2.5 (^2) 1.5 (^1) 0.5 0
step response: K=2 ;T=1 ;D=0.
Time (seconds)
Amplitude
Abbildung PA1-6: Ortskurve und Übergangsfunktion eines
-Glieds 2
−^1
−0.
−0.
−0.
−0.
−0.
−0.
−0.
−0.
−0.
0
− − 10 10 8 6 4 2 0 −^2 −^4 −^68
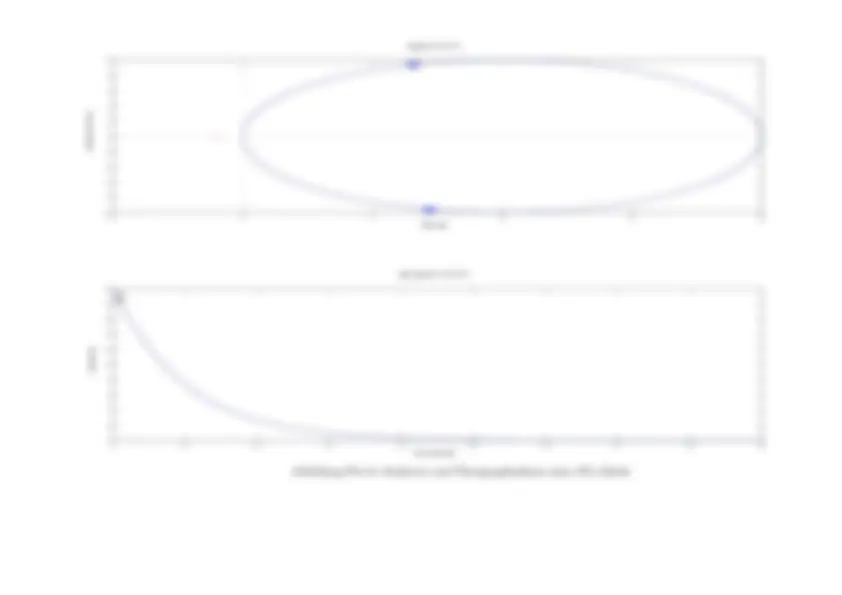
Nyquist: K=2 ;T=0.
Real Axis
Imaginary Axis
0
5
10
15
20
25
30
35
40
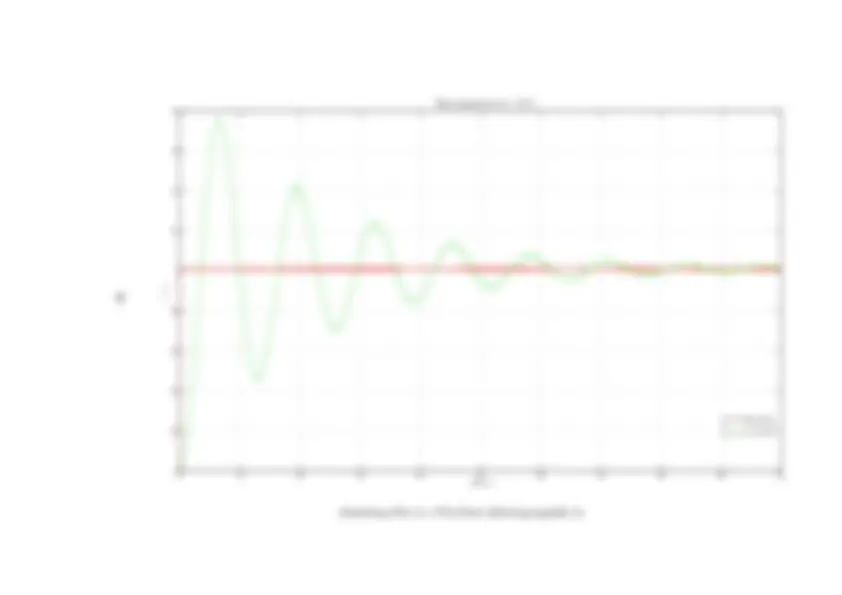
80 70 60 50 40 30 20 10 0
step response: K=2 ;T=0.
Time (seconds)
Amplitude
Abbildung PA1-7: Ortskurve und Übergangsfunktion eines
-Glieds
1.2.12 Geben Sie die Übergangsfunktionen der in Aufgabe 2 betrachteten Systeme an!
Die Berechnung der Übergangsfunktionen wird hier nur beispielhaft am P T 1 -Glied ge- zeigt. Die Vorgehensweise ist bei den anderen Gliedern ähnlich, jedoch deutlich aufwen- diger. Alle anderen Gleichungen aus [3]
P T 1 -Glied
Die Übertragungsfunktion des P T 1 -Gliedes lautet:
G(s) =
1 + T s
K T s + (^) T^1
s + a
Die Übergangsfunktion oder Sprungantwort (im Frequenzbereich) lautet:
H(s) =
s(s + a)
c 1 s
c 2 s + a
Für die Rücktransformation mittels Laplace-Tabelle muss eine Partialbruchzerlegung durchgeführt werden. Man erhält:
K^ ˜ = c 1 · (s + a) + c 2 · s (PA1-13) = (c 1 + c 2 ) ︸ ︷︷ ︸ =0^!
·s + (^) ︸︷︷︸c 1 a =^! K ˜
Es folgt aus einem Koeffizientenvergleich der linken und rechten Seite:
c 1 =
a
c 2 = −c 1 = −K (PA1-16)
Der folgende Ausdruck kann nun mittels Laplace-Tabellen transformiert werden:
H(s) =
s
s + a
L−^1 {H(s)} = h(t) (PA1-18) = Kδ(t) − Ke−^
t T (^) δ(t) (PA1-19)
P T 2 -Glied
Es muss eine Fallunterscheidung für D gemacht werden:
h P T 2 (t) = Kδ(t) − Ke−^ Tt
( 1 − t T
) (PA1-20)
h P T 2 (t) = Kδ(t) − Kω^20 s 1 − s 2
( 1 s 1
e s^1 · t^ −
s 2
e s^2 · t
) (PA1-21)
s 1 , 2 = ω 0
( −D ±
√ D^2 − 1
) (PA1-22)
h P T 2 (t) = K
( 1 − e− Dω^0 t √ 1 − D^2
· sin
( ω 0
√ 1 − D^2 t + Ψ
)) δ (PA1-23)
Ψ = arctan
) (PA1-24)
IT 1 -Glied
Die Sprungantwort eines IT 1 -Gliedes ist das Integral der Sprungantwort des P T 1 -Gliedes.
h IT 1 (t) =
∫ (^) t
0
h P T 1 (τ )dτ (PA1-25)
= Kt − KT
( 1 − e
t T
) δ(t) (PA1-26)
DT 1 -Glied
Die Übergangsfunktion berechnet sich zu folgendem:
h(t) =
e−^ Tt δ(t) (PA1-27)
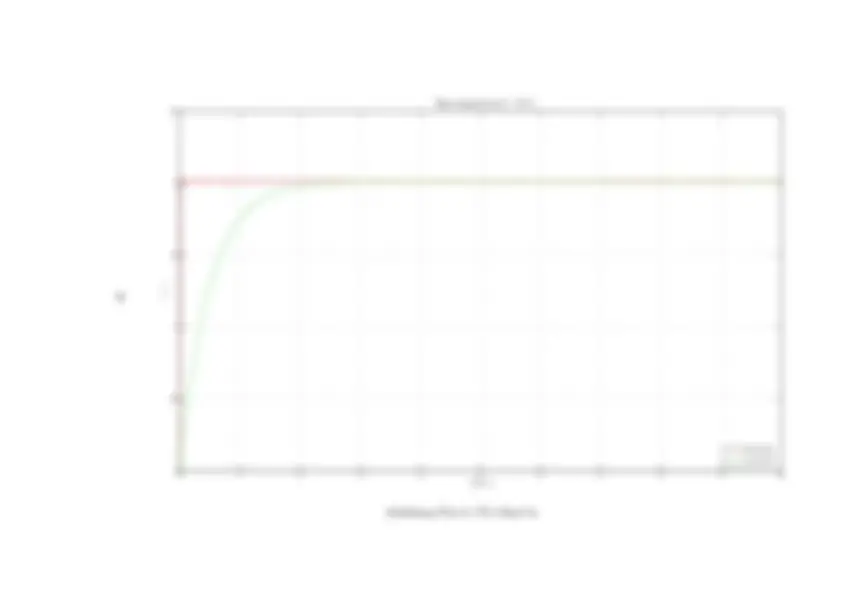
1.2.13 Informieren Sie sich über Methoden der Identifikation von P T 1 − und P T 2 − Strecken anhand der Übertragungsfunktion! Wie erfolgt die Bestimmung der Streckenparameter?
Bei dem P T 1 −Glied handelt es sich um eine Verzögerung erster Ordnung. P T 1 -Glied: G(s) = (^) 1+ KT S
y(t → ∞) u 0
Ku 0 y(t ˙= 0) (PA1-29) (PA1-30)
Abbildung PA1-9: Anwendung der küpfmüller-Methode erweitert durch strejc nach [2, S. 300]
Weitere Möglichkeiten ist die Approximation nach thal-larsen mittels P T 3 T t -Glied (siehe [2, S. 302]).
1.2.15 Welche Testsignale sind zur Identifikation von DT 1 − Gliedern geeignet? Wie ermittelt man aus dem entsprechenden Zeitverläufen die Kennwerte des DT 1 − Gliedes?
DT 1 −Glied: G(s) = (^) 1+ KsT s Der Parameter K kann durch das asymtotische Verhalten der Rampenantwort ermittelt werden:
K = y(t → ∞) u 0
Oder aber durch Untersuchung der Sprungantwort:
a = y(t →˙ 0) = − Ku 0 T 2
b = y(t → 0) = Ku 0 T
Es ergibt also ein Gleichungssystem mit zwei Gleichungen und zwei Unbekannten:
−b^2 a
Ku 0 b
1.2.16 Ermitteln Sie analytisch die Dämpfung D und die Zeitkonstante T 0 des Regelkreises bestehend aus I− Regler G R (s) = K sI = (^) T^11 s und P T 1 − Strecke G S (s) = (^) TSK sS +1 als Funktionen von T S , K S und K 1 = (^) T^11! Wie sind T S , K S und K 1 zu wählen, damit sich bestimmte Werte für D und T 0 einstellen lassen?
Abbildung PA1-10: Blockschaltbild eines Regelkreises aus I-Regler und P T 1 -Strecke
Aus Abbildung 1.2.16 kann folgende Gleichung für die Übertragungsfunktion G(s) her- geleitet werden.
Y (s) = G S (s)G R (s) [U (s) − Y (s)] (PA1-40)
=
G S (s)G R (s) a + G R (s)G S (s)
︸ ︷︷ ︸ G ( s )
U (s) (PA1-41)
Mit G S (s) als Übertragungsfunktion der Strecke und G R (s) als Übertragungsfunktion des Reglers
G S (s) =
T S s + 1
G R (s) =
s
⇒ G(s) =
T s s^2 + s + K S K I
︷︸︸︷^ K 1 T S ︸^ K S ︷︷^ K I ︸ T (^) 02
s^2 +
2 dT 0
s + 1