



Computer Graphics
Lec5
2D Transformations
1
Transformations










Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
2D Transformation: - Basic Transformations - Homogeneous coordinate system - Composition of transformations
Typology: Lecture notes
1 / 22

This page cannot be seen from the preview
Don't miss anything!
1
Transformations
2 Free powerpoint template: www.brainybetty.com
4
Basic Transformations
Homogeneous coordinate
system
Composition of
transformations 5
7
x’ = x + dx y’ = y + dy
(4,5) (7,5)
Y
Before Translation X
^
^
1
0 0 1
0 1
1 0
1
Homogenious Form
y
x
d
d
y
x
P P T d
d T y
x P y
x P
y
x
y
x
(7,1) (10,1) X
Y
Translation by (3,-4)
^
y
x y d
x d
y
x
0 1
1 0
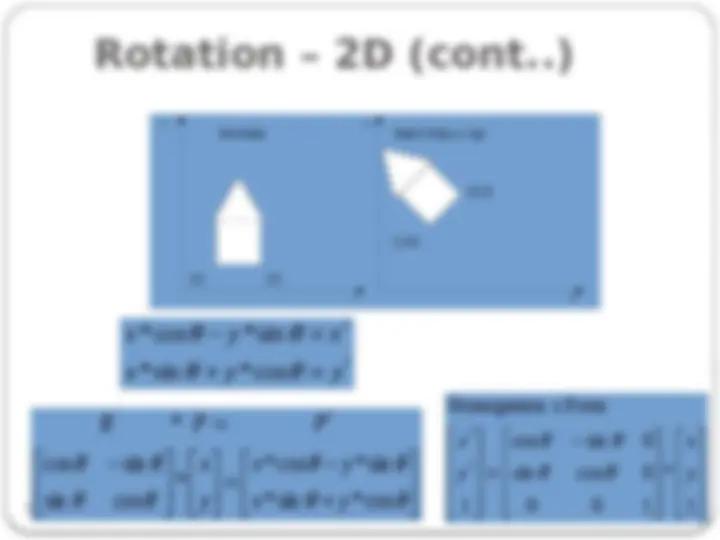
rotated
original
sin
cos
r
r v
cos sin sin cos
cos cos sin sin expand y r r
x r r
sin cos
cos sin
sin
cos but y x y
x x y
y r
x r
sin
cos
r
r v
10
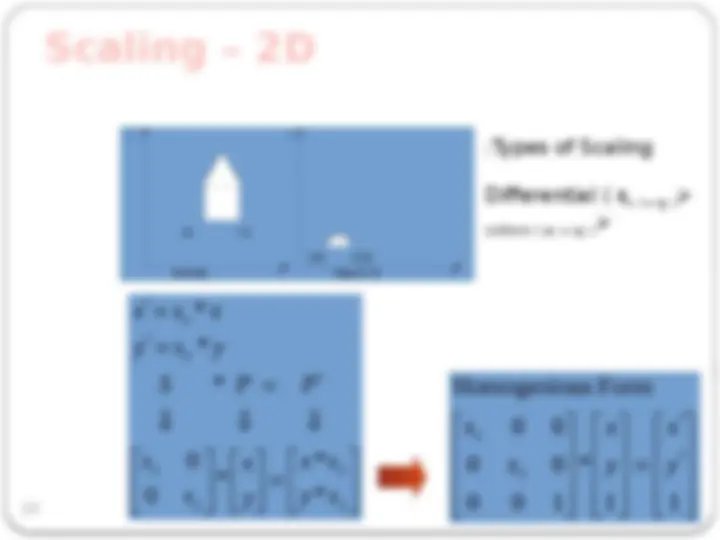
: Types of Scaling
Differential ( sx != sy )
(4,5) (7,5) Uniform ( sx = sy )^
Y
X
(2,5/4) (7/2,5/4) X
Y
Before Scaling Scaling by (1/2, 1/4)
y
x
y
x
y
x
y s
x s
y
x s
s
y s y
x s x
x
x
Application of scaling “Reflection”
11
(^)
(^)
0 0 1
0 1 0
1 0 0
Reflection about X- axis
M x
x x y y
(1,1)
(1,-1)
Y
X
(-1,1) (1,1)
X
Y
13
y
- y
x
- x
( , )
- (sx,sy)
(-θ
- (θ
(-dx,-dy)
- (dx,dy)
M M
M M
S S
R R
T T
sx sy
1
1
1
)
1 )
1
Mirror Ref :
Sclaing :
Rotation :
Translaito n :
1 1
14
Translation, scaling and rotation are
expressed (non-homogeneously) as: translation: P = P + T Scale: P = S · P Rotate: P = R · P
Composition is difficult to express, since
translation not expressed as a matrix multiplication Homogeneous coordinates allow all
three to be expressed homogeneously, using multiplication by 3 matrices W is 1 for affine transformations in
graphics
16
unit cube (^) 45 deg rotaton Scale in X not in Y
Commutative of Transformation
Matrices
17
Translate Translate Scale Scale Rotate Rotate Uniform Scale Rotate
Original Transitional Final
19
Q(x,y)
P(h,k)
Step 1: Translate P(h,k) to origin
T(-h ,-k)
Q1(x’,y’)
Step 2: Rotate w.r.t to origin
Q2(x’,y’)
Step 3: Translate (0,0) to P(h,k0)
*** T(h ,k)**
P3(h,k)
Q3(x’+h, y’ +k)
20
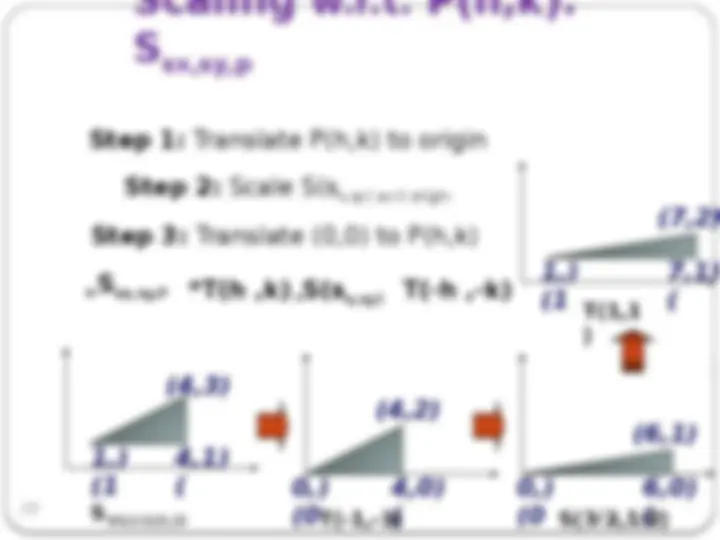
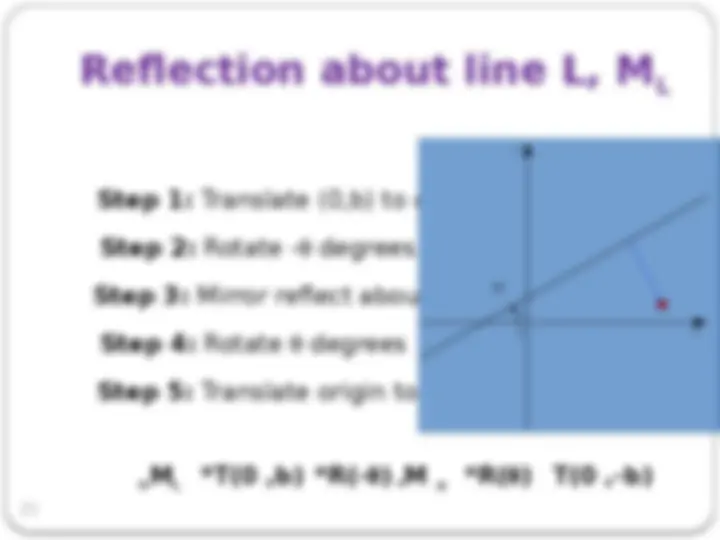
=Ssx,sy,P T(h ,k)S(sx,sy) T(-h ,-k)
S3/2,1/2,(1,1)
Step 1: Translate P(h,k) to origin
Step 2: Scale S(sx,sy) w.r.t origin
Step 3: Translate (0,0) to P(h,k)
)