


2D transformations and
homogeneous coordinates
Dr Nicolas Holzschuch
University of Cape Town
e-mail: [email protected]
Modified by Longin Jan Latecki











Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
2D TRANSFORMATION Transformations in 2D: vector/matrix notation example: translation, scaling, rotation Homogeneous coordinates: consistent notation several other good points (later) Composition of transformations Transformations for the window system
Typology: Exams
1 / 25

This page cannot be seen from the preview
Don't miss anything!
University of Cape Town e-mail: [email protected] Modified by Longin Jan Latecki [email protected]
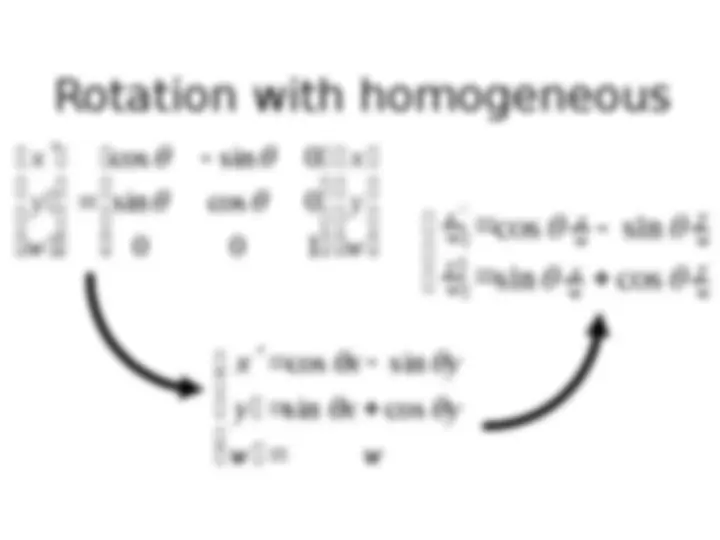
x y
x y w
1 0 t x 0 1 t y 0 0 1
x y w
x y w
x wt x y wt y w
x y w s x 0 0 0 s y 0 0 0 1 x y w x y w
s x x s y y w
Q
Q
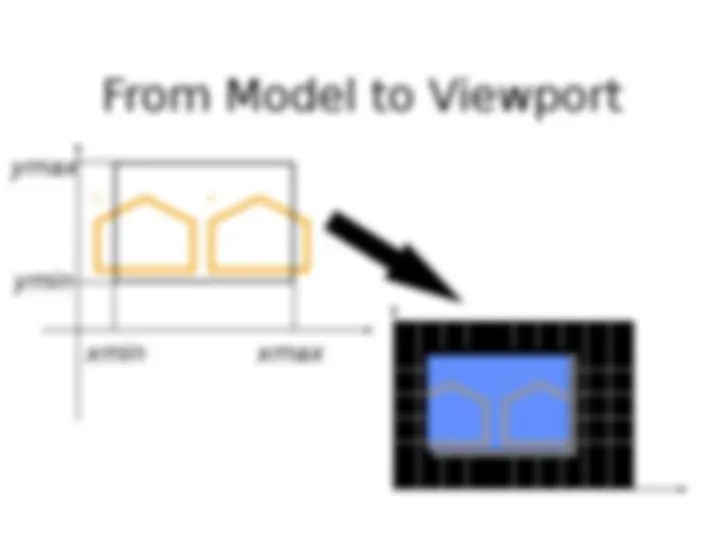
xmin xmax ymin ymax