



کیناکمیسدـنهمهدکشناد
لوا لصف : همدقم(کیناکم کیمانید رب یرورم)
هتفرشیپ کیمانید
هئارا :تاجن نیسح
















































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
advanced dynamics sharif chapter1 based on ginsberg
Typology: Lecture notes
1 / 109

This page cannot be seen from the preview
Don't miss anything!
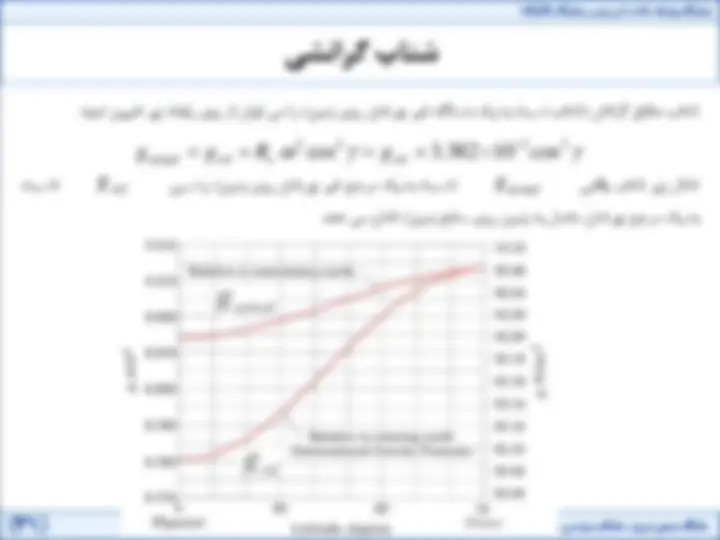
)مروری بر دینامیک مکانیک(مقدمه دینامیک پیشرفته،
دهجایگزین ش به وسیله کمیات فرض کنید مختصات •
:آنگاه مطابق شکل زیر داریم. باشند
.بردارهای مختصات متعامد هستند در اینجا •
1 2 3
r z
cos 1 sin (^2) r r
r a a e
r a a e
3 z z
r a e
1
2
3
r
z
e (^) r , e , e z
مختصات قطبی حالت خاصی از مختصات استوانه ای است کده در آن حرکدت در راسدتای •
یاستهاده م لذا برای تعیین مکان، سرعت و شتاب از .نداریم z محور
:لذا داریم. کنیم
:آنگاه داریم ) ( اگر مسیر نقطه دایره باشد، یعنی :حرکت دایره ای •
:برای سرعت ذره در دستگاه مختصات استوانه ای داریم •
r
v (^) P a / r e r r e
2 a (^) P a / ( r r ) e (^) r ( r 2 r ) e
r R Cons
P a /
R
2 P a / r
R R
a e e
(^2 2 2 2 2 ) dr d dz dr ( rd ) dz ds r dt dt dt dt dt
(^) (^) (^)
v
, R
sin cos 1 sin sin 2 cos (^3) R R
r a a a e
r a a a e
R sin sin 1 R sin cos 2 R sin
r a a e
1
2
3
sin cos sin sin cos
cos cos cos sin sin
sin cos 0
R
(^)
e a
e a
e a
R
r ( ) s
/
a a a
/
2
/
( ) 1 ( ) ,
( ) ( )
t t t t P a t n a a a a
P a t n
dv t d d d ds ds d ds v t dt dt dt ds dt dt ds dt
dv t v t
dt
(^) (^) (^)
e e e e a e e
a e e
دو نقطه ثابدت روی جسدم Q و P فرض کنید. جسمی که فاصله نقاط آن ثابت بماند، جسم صلب نامیده می شود
آنگاه سرعت و شتاب نقاط.است a نسبت به دستگاه مرجع باشد که دارای سرعت زاویه ای b صلب
:به وسیله روابط زیر به هم مربوط می شوند a نسبت به دستگاه مرجع Q و P
شتاب زاویده ای جسدم و Q نسبت به P بردار وضع نقطه در روابط باال
.است a صلب نسبت به دستگاه مرجع
a (^) P a / a Q a (^) / α b a (^) / r P Q (^) / ω b a (^) / ( ω (^) b a / r P Q / )
/ /
d
d
b a b a t a
ω α 𝐫 𝑃 𝑄
/ / / / /
P P a B a b a P B a rel b a P b
d
dt
(^)
r V V ω r V V ω r
/ / / /
/ / / /
2
/ 2 / /
P a B a P P a b a P (^) a a a b a
P P b a P B a b a P b a b (^) b b a a
P P B a b a b a P b b b
d d d d d
dt dt dt dt dt
d d d d d
dt dt dt dt dt
d d
dt dt
^ (^) (^) (^) (^) (^)
(^) (^) (^) (^) (^) (^)
^ ^ ^ ^ ^ ^
(^) (^) (^)
^
v v r a ω r
r r ω r a ω r ω
r r a ω α r ω (^) / /
2
/ 2 / / / /
/ / / / /
( )
2 ( )
2 ( )
P a b a P b
P P B a b a b a P b a b a P b b
B a rel b a rel b a P b a b a P
d
dt
d d
dt dt
(^)
(^) (^) (^)
^
r ω r
r r a ω α r ω ω r
a a ω v α r ω ω r
ری شتاب ذره نسبت به ناظ
در دستگاه چرخان و
b متحرک
ش شتاب کوریولیس ناشی از چرخ
بت دستگاه و سرعت نسبی ذره نس
b به دستگاه
b شتاب نقطه ای از دستگاه
نسبت به مبداP منطبق بر نقطه
این دستگاه
b شتاب مبدا دستگاه
aع نسبت به دستگاه مرج
نسبتb سرعت مبدا دستگاه
a به دستگاه مرجع
سرعت ذره نسبت به ناظری در
b دستگاه چرخان و متحرک
سرعت نقطه ای
b از دستگاه
P منطبق بر نقطه
ن نسبت به مبدا ای
دستگاه
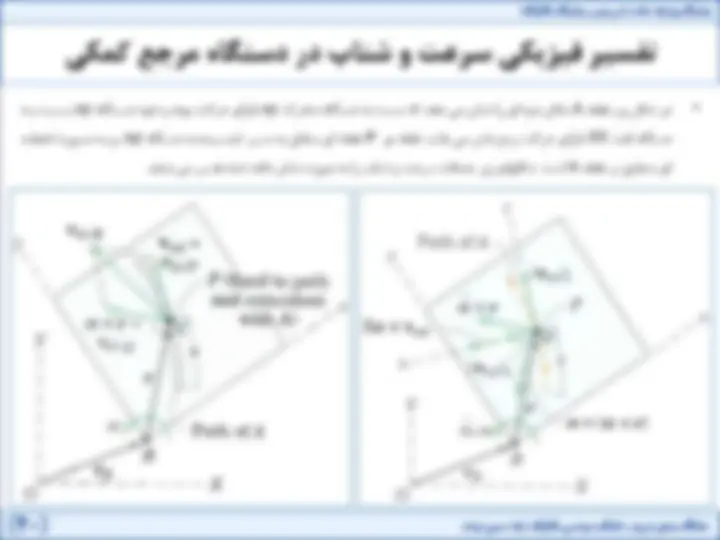
نسدبت بدهxyدارای حرکت بوده و خود دسدتگاهxyمکان ذره ای را نشان می دهد که نسبت به دستگاه متحرکAدر شکل زیر نقطه •
و بده صدورت لحظده)xyچسبیده به دستگاه(نقطه ای متعلق به مسیرP نقطه ی.دارای حرکت و چرخش می باشدXY دستگاه ثابت
.شکلهای زیر جمالت سرعت و شتاب را به صورت نشان داده شده تهسیر می نماید.استA ای منطبق بر نقطه