



کیناکمیسدنـهمهنشکداد
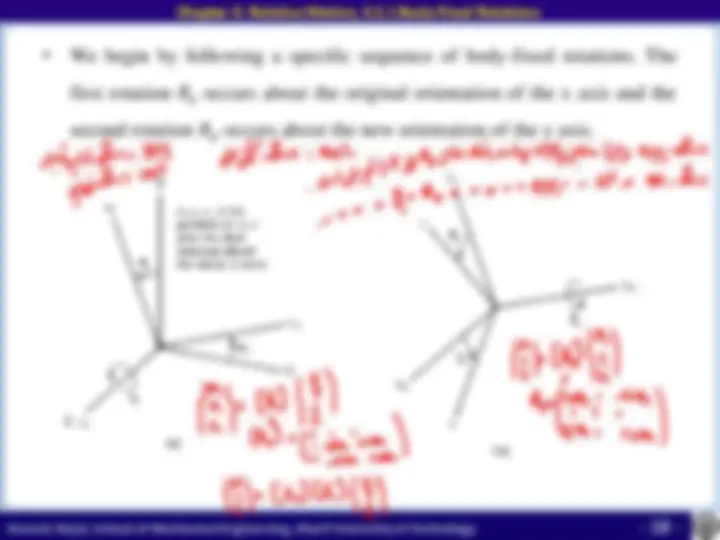
Chapter 3: Relative Motion
Advanced Dynamics
Lecturer: Hossein Nejat























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
advanced dynamics sharif lecture notes
Typology: Lecture notes
1 / 31

This page cannot be seen from the preview
Don't miss anything!
کانیکمیسدمهـندادکشنه
Lecturer: Hossein Nejat
Concluding Remark: