



Image Processing
and Computer
Vision for Robots
Docsity.com























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the Lecture Slides of Robot Vision and Preception which includes Transforms, Derived, Fast Fourier, Discrete Fourier Transform, Fast Cosine, Discrete Cosine Transform, Radon Transform, Slant, Karczmarz etc. Key important points are: Computer Vision For Robots, Image Processing, Convolution-Based, Robot Vision, Filters, Convolution Application, Binary Image Creation, Industrial Robotics, Popularly, Pixels Averaging
Typology: Slides
1 / 68

This page cannot be seen from the preview
Don't miss anything!
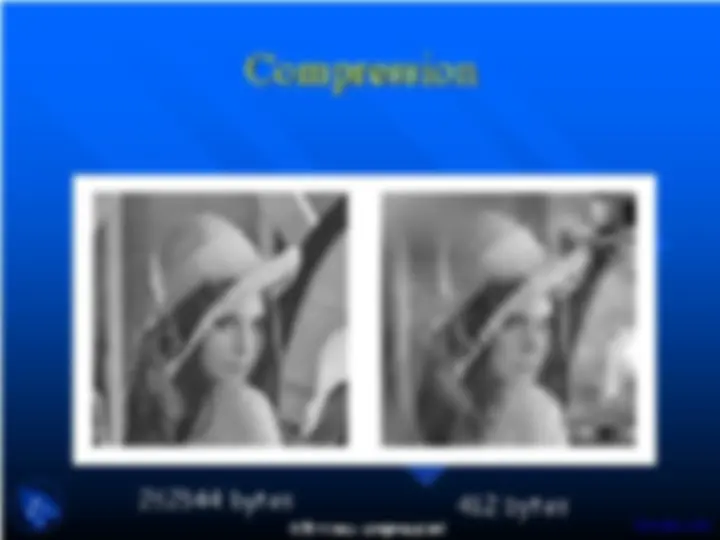
Binary Image Creation Popularly used in industrial robotics Docsity.com
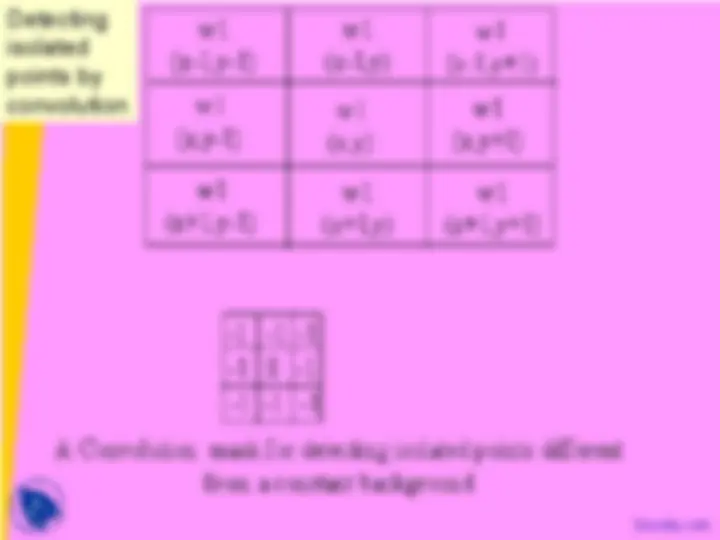
Convolution Kernel
Convolution kernel
,y
), f(x
,y
),…,f(x
,y
) ) can be highly
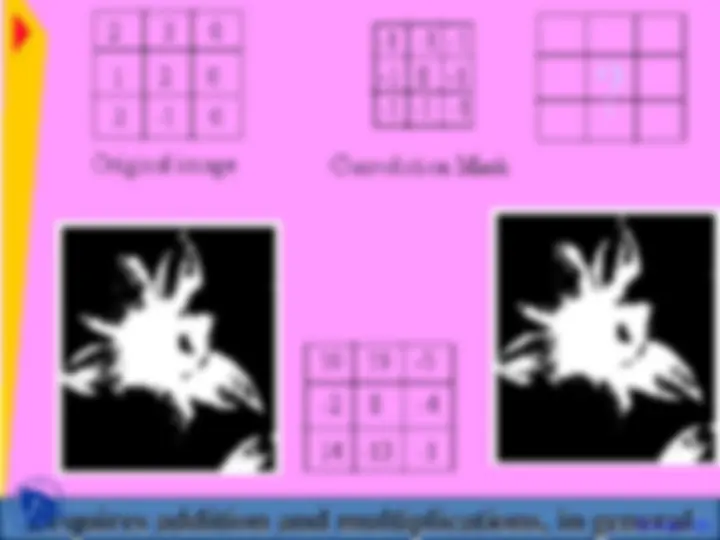
Example of a More general Convolution
Original Image Mask p1,1 p1,2 p1,3 p1,4 p1,5 p1, p2,1 p2,2 p2,3 p2,4 p2,5 p2, p3,1 p3,2 p3,3 p3,4 p3,5 p (^3) , 6 p4,1 p4,2 p4,3 p4,4 p4,5 p4, p5,1 p5,2 p5,3 p5,4 p5,5 p5, p6,1 p6,2 p6,3 p6,4 p6,5 p6,
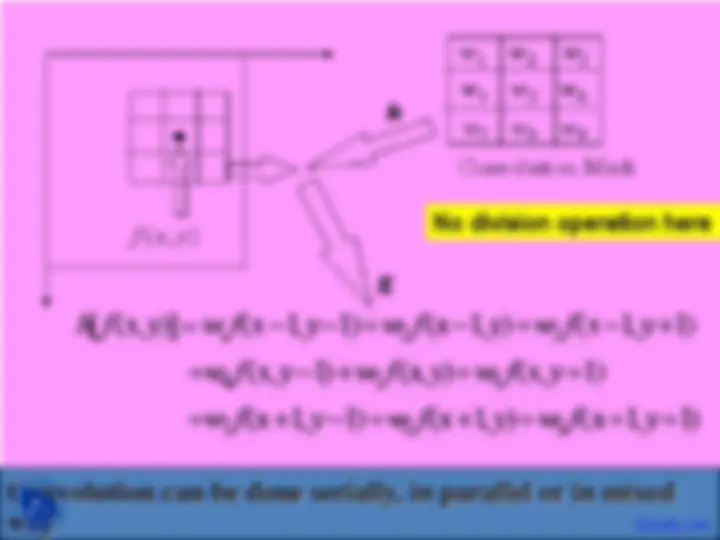
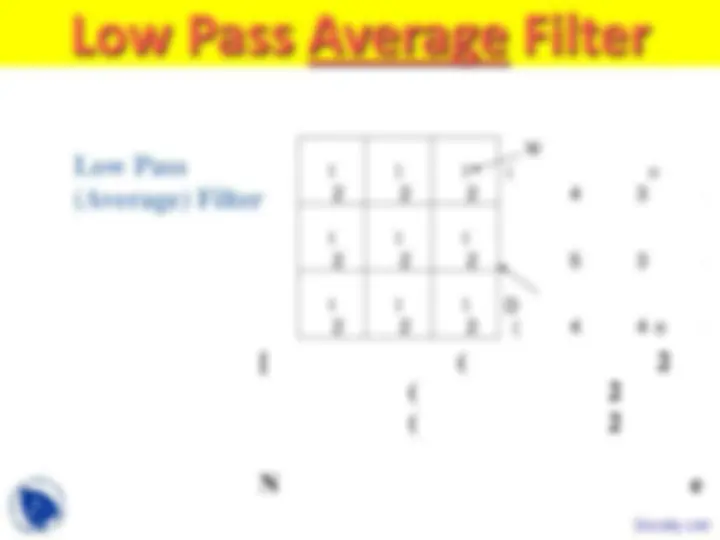
More general Convolution (continued) At the heart of convolution operation is the convolution mask or kernel , shown as M(ask) or W(indow) in next figures The quotient is known as the weight of the mask ∑ ∑ ∑ ∑ = = = = × = n j ij m i n j ij ij m i m p m Cxy 1 1 1 1 Example of a More general Convolution
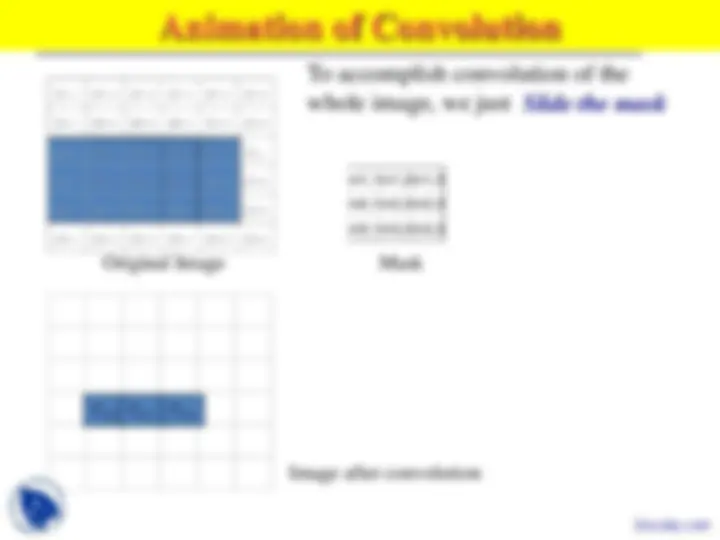
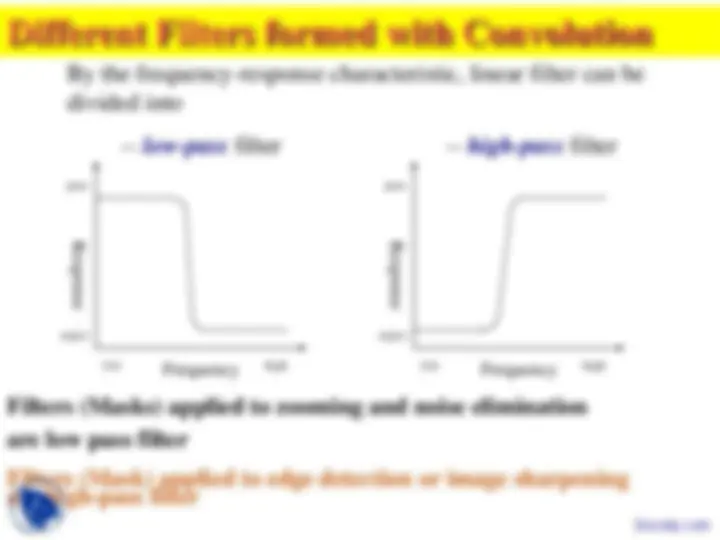
Filtering by convolution Algorithm
**1. Reads the DN of each pixel in array