



Objective of Computer Vision
• The field of computer vision can
be divided into two areas
– Image enhancement
– Image analysis
Here we concentrate on fast methods typical for robot soccer and robot
theatre applications
Docsity.com




































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the Lecture Slides of Robot Vision and Preception which includes Transforms, Derived, Fast Fourier, Discrete Fourier Transform, Fast Cosine, Discrete Cosine Transform, Radon Transform, Slant, Karczmarz etc. Key important points are: Computer Vision, Field Of Computer Vision, Divided, Image Enhancement, Image Analysis, Binary Image Processing, Two Gray Levels, Basic Terms, Machine Vision, Aspects
Typology: Slides
1 / 67

This page cannot be seen from the preview
Don't miss anything!
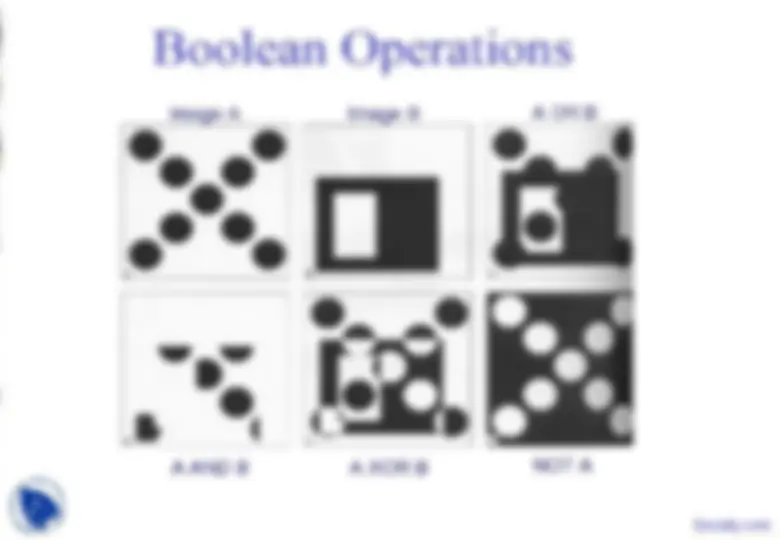
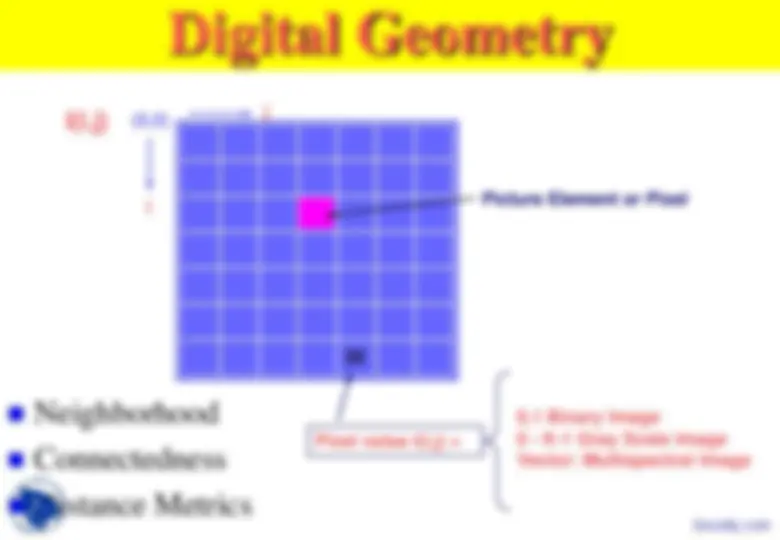
Binary image processing Image with two gray levels 0 and 1 It contains the basic terms and concepts used in machine vision. Its techniques are used in all aspects of a vision system. Small memory requirements Fast execution time
Gray level image vs. binary image
Point Operations
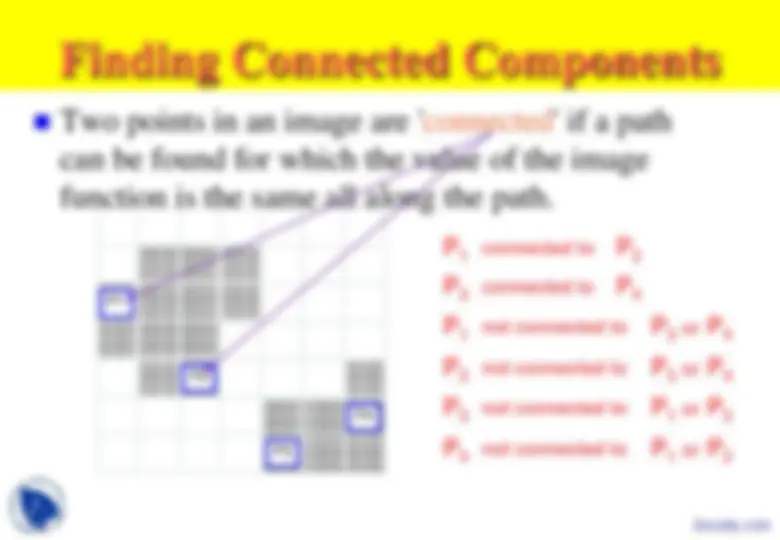
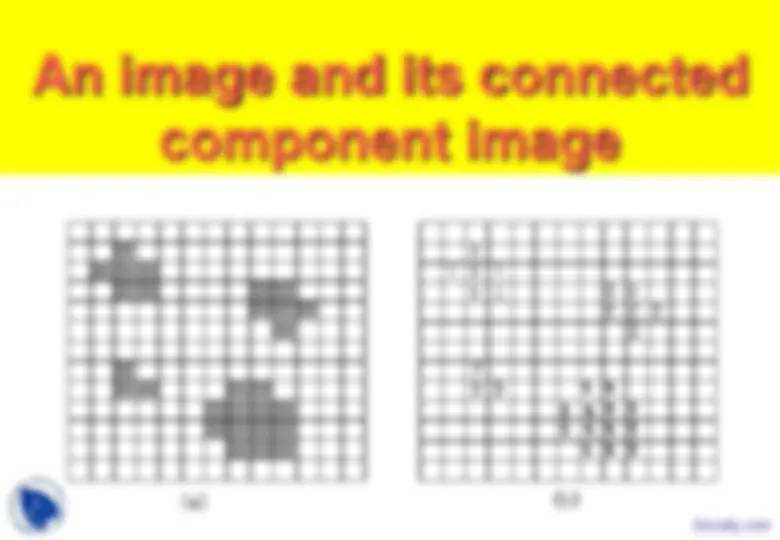
Region and segmentation Region ( ) A subset of an image Segmentation Grouping of pixels into regions such that
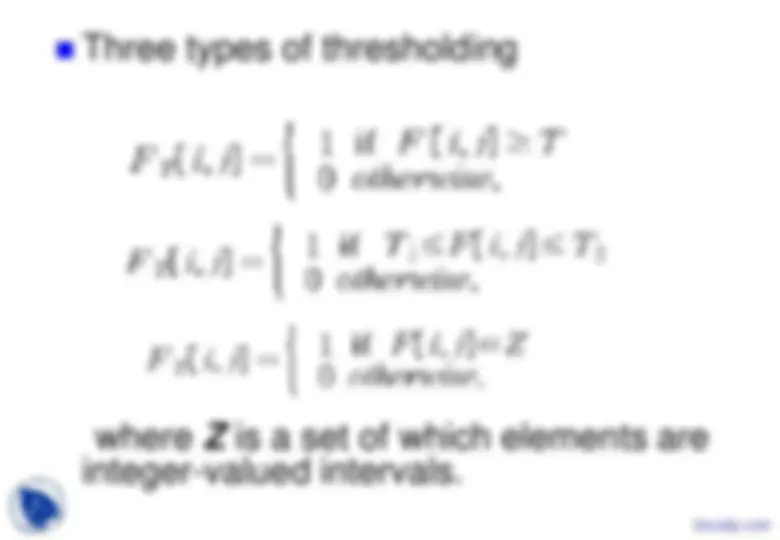
Thresholding
Three types of thresholding where Z is a set of which elements are integer-valued intervals.
Original image and its histogram
Histogram Equalization
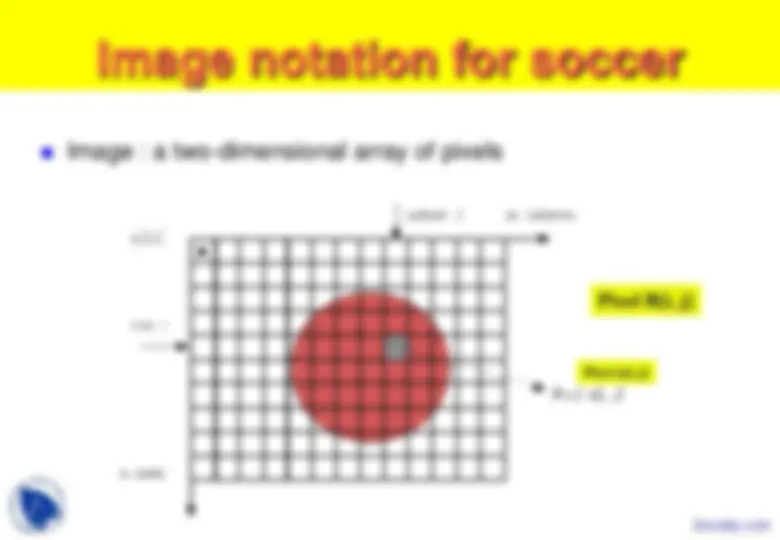
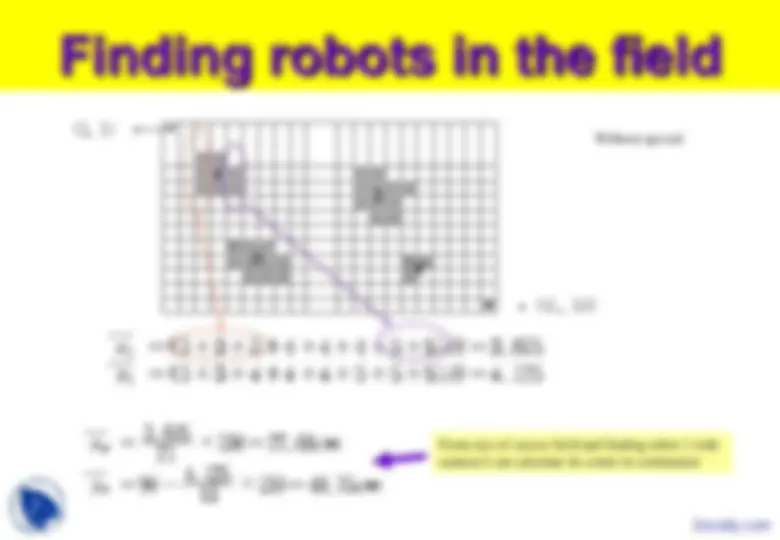
Image notation for soccer Image : a two-dimensional array of pixels Pixel a[i, j]
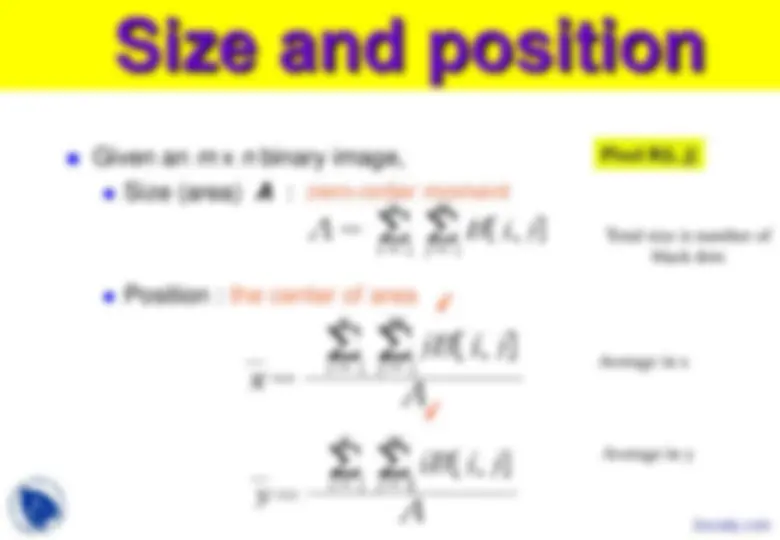
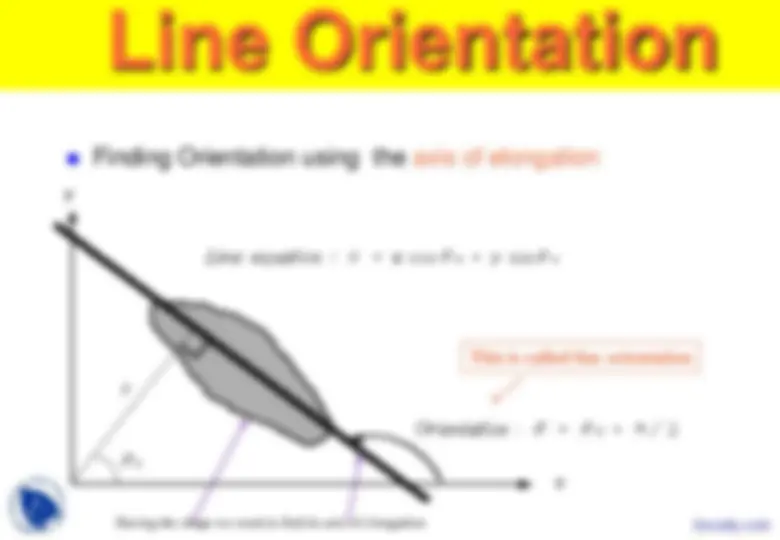
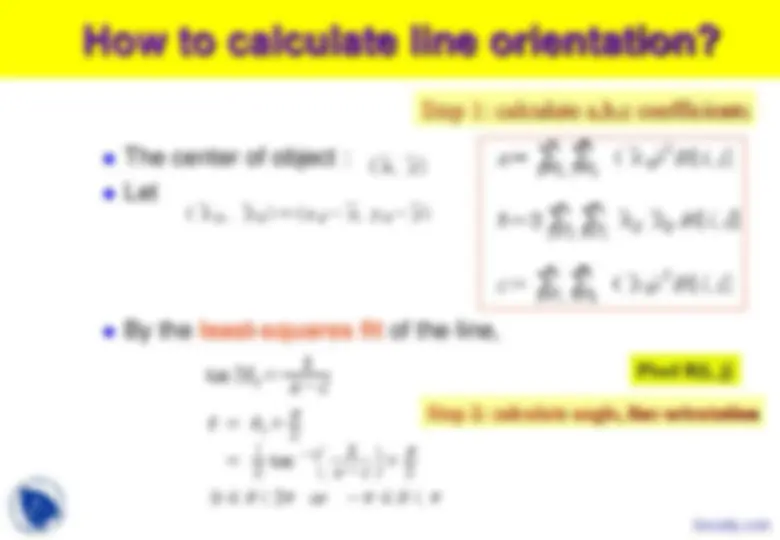
Geometric properties In many cases, some simple features of regions are useful to: determine the locations of objects, and to recognize objects. Geometric properties: Size Position Orientation