Download concours national commun and more Schemes and Mind Maps Physics in PDF only on Docsity!
CONCOURS NATIONAL COMMUN
D’ADMISSION AUX GRANDES ECOLES D’INGENIEURS
MAROCAINES
SESSION : 2023
FILIERES : PSI
EPREUVE DE SCIENCES INDUSTRIELLES
POUR L’INGENIEUR
DUREE : 4 HEURES
AUCUN DOCUMENT N’EST AUTORISE
CALCULATRICES AUTORISEES
Le sujet s’étale sur 25 pages réparties comme suit :
Une page de garde (la page 1 ). Le texte de l’épreuve : pages numérotées de 2 à 19. Deux documents annexes : pages numérotées 20 et 21. Quatre documents réponses repérés DR1, DR2, DR3 et DR4 : pages numérotées de
22 à 25. ( A RENDRE AVEC LA COPIE).
Le sujet se compose de plusieurs parties indépendantes pouvant être traitées
indifféremment.
Nota : Si un candidat est amené à repérer ce qui peut lui sembler être une erreur d'énoncé, il le signalera sur sa copie et devra poursuivre sa composition en expliquant les raisons des initiatives qu'il a été amené à prendre.
PRESENTATION
Le système ( Active Drive) appelé aussi : 4Control, permet de rendre les roues arrière d’un véhicule automobile directrices (4RD ou 4WS : quatre roues directrices). Cette technologie garantit plus de maniabilité (en ville notamment), plus de dynamisme et une plus grande précision de conduite. Ce concept a déjà été commercialisé par des constructeurs japonais dans les années 80 et 90. Mais il fut abandonné car sa conception, principalement mécanique, limitait les adaptations aux différents véhicules.
Selon la vitesse du véhicule dans un virage, les roues arrière braquent soit dans le même sens que les roues avant afin de contrer la force centrifuge ( figure 1b ) , soient, dans le sens inverse de ces dernières( figure 1a ) ; ceci lui permet d'être bien plus simple à garer en ville par exemple. Selon les constructeurs et la technologie utilisée, le système peut aussi être utilisé pour stabiliser le véhicule lors du freinage d'urgence, dans ce cas les roues arrière braquent toutes les deux vers l'intérieur ( figure 1c ).
Renault a récemment développé une nouvelle technologie de ce système en utilisant les informations dynamiques du véhicule. Les constructeurs d’automobiles utilisent les données fournies par l ’ABS/ESP ( système antiblocage des roues/ correcteur électronique de trajectoire (en anglais Electronic Stability Program)) pour adapter les paramètres en temps réel.
Le système 4Control utilise ainsi une mécatronique moderne intelligemment adaptée sur l’essieu arrière.
Figure 1 : Action du système (4Control) sur les roues arrière d’un véhicule
Figure 1a : braquage à petite vitesse Bonne maniabilité du véhicule
Figure 1b : braquage à grande vitesse Bonne stabilité du véhicule
Figure 1c : freinage d’urgence
PARTIE 1- EXERCICE PRELIMINAIRE (Noté 4 points sur 20).
Question 1.1. Le système étudié est décrit par trois diagrammes SysML, citer deux autres types de diagrammes SysML utilisés dans l’ingénierie système.
Question 1.2. Parmi les trois diagrammes SysML présentés dans le sujet ; lequel permet-il de décrire le cahier des charges fonctionnelles.
Question 1.3. Quelles sont les exigences nécessaires qui permettront de réaliser l’exigence id.1. indiquée sur le diagramme des exigences de l’Annexe 1.
Question 1.4. (Répondre sur DR2) À partir du schéma cinématique du document Annexe 2, remplir le tableau du document réponse DR2 en indiquant pour chaque liaison, le torseur cinématique et le torseur d’action mécanique transmissible par les liaisons (considérées parfaites), On rappelle Les notations habituelles utilisées pour les torseurs :
int
( / ) w
ij ij ij ij po ij^ ij base
u i j v
a J b g int
Lij^ ij^ ij ij ij po ij^ ij base
X L i j Y M Z N Torseur cinématique. Torseur d’action mécanique transmissible.
Question 1.5. (Répondre sur DR2) donner la liaison cinématiquement équivalente entre la roue (4) et le châssis (0), en indiquant les mouvements possibles.
On considère le schéma cinématique de la figure 3, ci-après :
Question 1.6. Donner les vecteurs rotations : (1 / 0)et (2 / 0).
Question 1.7. Déterminer le vecteur vitesse V A ( / 0).
Question 1.8. Déterminer le vecteur vitesse V B ( / 0) par dérivation.
Question 1.9. Déterminer le vecteur vitesse V B ( / 0) par la relation des champs de moments.
Question 1.10. Ecrire les torseurs cinématiques de (1) et de (2) par rapport à (0) : {^ }^ et { }.
Le repère R 0 (^) ( O x , 0 (^) , y 0 (^) , z 0 ) fixe est lié au bât (0). Le repère R 1 (^) ( A x , 0 (^) , y 0 (^) , z 0 ) est lié à (1) en translation par rapport à (0) de direction et on pose : OA x x. 0 (^) h y. 0 ( x : variable). Le repère (^) R 2 (^) ( A x , 2 (^) , y 2 (^) , z 0 )est lié à (2) en liaison pivot (1), d’axe. On donne AB L x. 2 et. ( α : variable).
x 0
( A z , 0 ) a ( x 0 (^) , x (^) 2 ) ( y (^) 0 , y 2 )^ Figure 3 : Schéma cinématique partiel.
A
B
x 0
y 0 z 0 2 x
O
Bâti (0)^ x 0
Inertie de la roue :
On modélise la roue par un solide (S) de masse m, de centre d’inertie C , constitué d’un cylindre creux de rayons Re et Ri percé de quatre trous débouchant identiques de rayons « r » reparties sur un rayon « 4r » comme le montre la figure 4. Afin de faciliter les calculs on propose de considérer que la roue S est une plaque d'épaisseur négligeable, obtenue à partir d’un disque homogène S 1 de rayon Re et de centre C, duquel on retranche le disque S 2 (de rayon Ri et de centre C) et les quatre disques S 3 ,S 4 , S 5 et S 6 de rayons r et de centres d’inertie C 3 ,C 4 , C 5 et C 6 respectivement comme indiqué sur la figure 4.
Question 1.11. Déterminer la masse surfacique notée (λ) du matériau de S en fonction de : m, Re, Ri , r et h.
Question 1.12. Déduire m 1 ,m 2 et m 3 : les masses des disques S 1 , S 2 et S 3 respectivement, en fonction de m, Re, Ri et r.
Question 1.13. Donner l’expression de I2z ; le moment d’inertie de S 2 par rapport à l’axe (C, z).
(On donne I1z =
2
- 2^ e (^) m^ R le moment d’inertie de S 1 par rapport à l’axe (C, z).
Question 1.14. Déterminer I3z ; le moment d’inertie de S 3 par rapport à l’axe (C, z) en utilisant le théorème de Huygens.
Question 1.15. D éterminer Iz : moment d’inertie de S par rapport à l’axe (C, z) en fonction de m, Re , Ri et en vous aidant de la relation : Iz = I1z - I2z – 4.I3z.
Fin de la partie préliminaire.
Figure 4 : modèle géométrique simplifié de la roue.
- -
=
Rayon : 4r Rayon : Re
Rayon : r
C C^3
C 4
C 5
C 6
S 3
S 4 S 5
S 6
S 1 S 2
Rayon : Ri
C
C C
x
y
x
y
z
Roue (S)
PARTIE 3: CHOIX DE L’ACTIONNEUR :
Le braquage des roues arrière ne résulte pas directement de la décision du conducteur au volant. IL est décidé par le calculateur qui commande les actionneurs de braquage. La solution choisie dans cette étude est d’actionner les roues arrière par un vérin électrique. Ce vérin braque la roue par l’intermédiaire d’un système mécanique dont le schéma cinématique simplifié est représenté sur la figure 5.
Le châssis du véhicule S 0 : (fixe), repère associé : R 0 (^) ( O x , 0 (^) , y 0 (^) , z 0 ) (supposé galiléen). Le champ de pesanteur est représenté par (^) g g z. 0. On pose : (^) OC e x. 0 (e : constante positive).
Figure 5
y 3
z 0
y 0
x 0
x 2
x 3
y 2
a
b
a
b
y 0
x 0
x 2 x 3
y 3
a
b
A
B
C
1 G 2
Vérin
O
y 0
Schéma d’analyse
Visqm
1
2
3 0 Pivot d’axe^ glissant ( A x , 0 )
Pivot d’axe ( B z , 0 )
Pivot d’axe ( A z , 0 )
Pivot d’axe ( C z , 0 )
Ress k (^) V 01
Pesanteur
La tige (1) du vérin : masse m 1 , en translation (liaison parfaite) par rapport à (0) de direction (^) x 0 et on pose : (^) OA x x. 0.
Le vérin V 01 monté entre (0) et (1) exerce sur (1) une force F x. 0 appliquée au point A.
La biellette (2) : de masse m 2 , en liaison pivot parfaite avec (1), d’axe ( A z , 0 ). On pose
a ( x 0 (^) , x 2 (^) ) ( y 0 (^) , y 2 )^ et^ G^2 est le centre d’inertie de (2) tel que^ :^ AB 2. AG 2 (^) a x. 2. Le repère (^) R 2 (^) ( A x , 2 (^) , y (^) 2 , z 0 )est lié à la biellette (2).
On pose J 2 le moment d’inertie de la biellette (2) par rapport à l’axe (^) ( G 2 (^) , z 0 ).
L’ensemble (roue + porte fusée) (3) : de masse m 3 , de centre d’inertie supposé en C. (3) est en liaison pivot d’axe ( C z , 0 ) avec (0) et en liaison pivot parfaite d’axe ( B z , 0 )avec (2).
On pose b ( x 0 (^) , x 3 (^) ) ( y 0 (^) , y 3 ) et CB b y. 3.
Le repère R 3 (^) ( C x , 3 (^) , y (^) 3 , z 0 )est lié à (3).
On pose J 3 le moment d’inertie de ( 3 ) par rapport à l’axe ( C z , 0 ).
Pour des raisons de sécurité, un ressort de torsion logé dans la liaison entre (0) et (3) permet de rappeler l’ensemble (3) à la position ( b 0 ) ; ce ressort est de raideur k et il exerce sur (3) un couple porté par (^) ( z 0 ).
Toutes les actions de frottement exercées sur la roue sont modélisées par un frottement visqueux ramené sur l’axe de la liaison entre (0) et (3) exerçant sur (3) un couple : m b.. z 0 où
m est le coefficient de frottement visqueux.
Question 3.1. En utilisant la fermeture géométrique, déterminer les deux relations liant les trois paramètres du système a b , et x. (projeter sur la base fixe)
Question 3.2. En déduire l’expression de aen fonction de b, et l’expression de xen fonction de b.
Question 3.3. Déterminer T (2 / R 0 ) : l’Energie cinétique galiléenne de la biellette (2).
Question 3.4. Déterminer T E ( / R 0 ) : l’Energie cinétique galiléenne du système (E) constitué des
solides (1), (2) et (3).
Question 3.5. Déterminer (^) P E ( E / R 0 ) : les puissances des actions mécaniques extérieures de
l’ensemble (E) par rapport au repère (^) R 0_._
Question 3.6. Déterminer P(int E): les puissances des actions mécaniques intérieures de l’ensemble (E).
Question 3.7. Par application du théorème de l’énergie cinétique au système (E), donner l’expression de l’effort F du vérin en fonction des données.
Un programme informatique permet de déterminer l’effort F en fonction de l’angle de pivotement b de la roue selon une loi en trapèze de b imposée.
Le bâti (0) : (fixe), repère associé : (^) R 0 (^) ( O x , 0 (^) , y 0 (^) , z 0 ) (supposé galiléen). L’accélération de
pesanteur est représentée par (^) g g z. 0. ( (^) z 0 verticale).
Le bras (1) : de masse m 1 , en liaison pivot parfaite d’axe (^) ( O z , 0 )par rapport à (0).
On pose x 0 (^) , x 1 (^) y 0 (^) , y 1 y , OG 1 (^) l x. 1 , OA d x. 1
Un actionneur A 01 est monté entre (0) et (1) exerçant sur (1) un couple C 01 (^). z 0.
Le bras (2) : masse et inerties supposées négligeables, en liaison pivot d’axe (^) ( A z , 0 )avec (1).
On pose x 1 (^) , x (^) 2 y 1 (^) , y 2 b et AD b x. 2.
Un actionneur A 12 est monté entre (1) et (2) exerçant sur (2) un couple C 12 (^). z 0.
Un ressort de torsion logé dans la liaison entre (1) et (2) permet de rappeler le bras (2) à la position ( b 0 ) ; ce ressort est de raideur k et il exerce sur (2) un couple porté par (^) ( z 0 ).
Le frottement visqueux de coefficient (^) m dans la liaison entre (1) et (2) est modélisé par un
couple mb. z 0 exercé sur (2).
La roue (3) : de masse m 3 , de centre d’inertie D, en liaison pivot parfaite d’axe (^) ( A x , 2 )par
rapport à (2). On pose z 0 (^) , z 3 (^) y 2 (^) , y 3 q. et AD b x. 2.
Un actionneur A 23 est monté entre (2) et (3) exerçant sur (3) un couple C (^) m. x 2.
La matrice d’inertie de 3 au centre D est :
2
3 3 (^3) ( , , )
0 0 , 3 0 0 (^0 0) x
A I D C C
Question 4.1. Déterminer l’expression de la vitesse (^) V D ( / R 0 ) du point D par rapport au repère (^) R 0_._
Question 4.2. Déterminer l’expression de l’accélération ( D / R 0 ) du point D par rapport à R 0_._
Question 4.3. Déterminer l’expression du moment cinétique s ( A ,3 / R 0 ) au point A, du solide (3)
dans son mouvement par rapport à R0.
Question 4.4. Déterminer y 2 (^). ( d A , 1 / R 0 ) : la projection sur y 2 du moment dynamique de l’ensemble
1^ (2 , 3 ) au point A, dans son mouvement par rapport à R0.
Question 4.5. Isoler L’ensemble (1, 2 , 3) et écrire l’équation du théorème du moment dynamique TMD au point O en projection sur z 0 .(seuls les termes des actions mécaniques seront
développés).
Question 4.6. Isoler L’ensemble (^) 1 (2 , 3) et écrire l’équation du théorème du moment
dynamique TMD au point A en projection sur (^) z 0 .(seuls les termes des actions mécaniques seront
développés).
Question 4.7. Isoler L’ensemble (^) 1 (2 , 3) et écrire l’équation du théorème du moment
dynamique TMD au point A en projection sur (^) y 2 , en déduire l’expression de M 12 : la composante
suivant (^) y 2 du moment de l’action mécanique de la liaison entre (1) et (2)
Question 4.8. La composante M 12 du moment de l’action mécanique de la liaison entre (1) et (2) , tend a basculer la roue (3) atour de l’axe ( A y , 2 ). Quel est l’effet que produit la variation de b
(vitesse de braquage) sur le véhicule, puis donner l’expression de b qui permet d’annuler le moment M 12.
Pour les grandes vitesses, le calculateur du système Active drive permet de braquer les roues arrière dans le même sens que les roues avant ; à une vitesse qui permet de diminuer le risque de basculement et en tenant compte de la vitesse de rotation de lacet du véhicule « (^) y».
PARTIE 5 : VERIN ELECTRIQUE.
Le vérin électrique proposé dans notre étude est composé d’un moteur électrique et d’un réducteur à train d’engrenage épicycloïdal et d’un système vis-écrou. L’ensemble vérin est représenté sur le schéma cinématique de la figure 7.
Données : le châssis (0) est supposé fixe et galiléen, repère lié (^) R O x y z ( , , , ): Arbre et pignon moteur (1) : vitesse de rotation par rapport à (0) : (^) w 1 wm et Jm : son moment d’inertie par rapport à son axe ( O x , ). On note (^) Cm. x : le couple moteur sur (1). Satellite (2) : J 2 est son moment d’inertie équivalent ramené sur l’arbre moteur.
Porte satellite (3) : J 3 est son moment d’inertie par rapport à l’axe (^ O x ,^ )et w 3 sa vitesse
de rotation par rapport à (0).
Figure 7 : schéma cinématique du vérin électrique
Couronne (0)
Porte satellite (3)
m
Satellite ( 2 )
Moteur électrique (^) Pignon (1)
tige ( 4 )
(21) (2 2 )
Châssis fixe (0)
O B
y
x
PARTIE 6: ASSERVISSEMENT DE L’ANGLE DE BRAQUAGE :
Dans cette partie on s’intéresse à l’asservissement de l’angle de braquage de la roue arrière du véhicule. Le calculateur 4Control utilise principalement les informations suivantes : La vitesse du véhicule de référence ; L’angle du volant ; Le sens de roulage.
L’étude de la dynamique des véhicules à quartes roues directrices dans un virage nécessite des calculs assez longs et dont plusieurs paramètres entrent en jeu, notamment la vitesse de rotation de lacet, l’angle de dérive du véhicule et la vitesse et l’accélération latérale du véhicule … Pour des raisons de simplification notre étude concernera un prototype de véhicule d’essai en se limitant à des conditions particulières de roulage.
La figure 8 montre la représentation fonctionnelle simplifiée de l’asservissement de position de l’angle de braquage b ( )^ t.
La consigne bc ( ) t est générée par le calculateur du système et l’actionneur braque les roues
à travers la transmission mécanique. Les qualités désirées par le cahier des charges sont indiquées dans le tableau ( figure 9 ) suivant :
Rapidité Temps de réponse à 5% : t (^5) % ≤ , s Dépassement de la consigne ≤ 3 % Précision (^) Ecart statique nulle Stabilité (^) Marge de phase : 60 ° au moins Figure 9 : Extrait du cahier des charges.
Angle de braquage Réducteur + vis-écrou +^ de la roue système à biellettes
Capteur de position tachymétrique
- - - - - - -
Adaptateur (^) + Correcteur Moteur
Effets résistants ramenés sur l’axe moteur Consigne de braquage de la roue
Figure 8 : Schéma fonctionnel de l’asservissement de l’angle de braquage.
On donne les relations suivantes :
La vitesse de déplacement de la tige du vérin v t ( )^^ dx tdt ( )avec x(t) : le paramètre de
déplacement de la tige du vérin.
Le rapport de transmission de l’ensemble réducteur et système vis-écrou : w ( )( )^. m
v t (^) q n (^) t où (q) est le pas réduit de la vis et « n », le rapport des vitesses du réducteur. La fonction de transfert du capteur est un gain pur et égale à Kcapt (constante positive). La fonction de transfert de l’adaptateur de consigne est un gain pur et égal à Ka (constante positive). On admet la relation de linéarité entre le déplacement de la tige et l’angle de braquage b ( ) t de la roue : x t ( ) a. ( ) bt avec (a : constante positive).
Pour toute fonction f(t) on pose F(P) sa transformée de Laplace et toutes les conditions initiales des valeurs temporelles sont supposées nulles.
On notera h(t) la fonction de Heaviside (= 1 pur t > 0 et =0 sinon).
La modélisation adoptée abouti au schéma de la figure 10.
Question 6.1. Proposer deux types de capteurs de position qu’on pourrait utiliser dans la chaîne de retour.
Question 6.2. Donner les fonctions de transferts A 1 (p), A 2 (p) et A 3 (p) indiquées sur le schéma de la figure 10.
Question 6.3. Déterminer la valeur de Ka à adopter pour l’asservissement afin d’avoir avoir un écart nul lorsque la réponse atteint la consigne.
Figure 10 : Modélisation retenue pour l’asservissement de b (t)
U(p)
Cr(p)
Moteur V(p)
bC ( ) p^ (p)
Ka
Kcapt
Ωm(p) (^) A X p ( ) C(p) A^1 (p)^2 (p) A 3 (p)
b ( ) p
Figure 12.
Pour la suite on négligera l’inductance du moteur et on transforme le schéma de l’asservissement global en chaine bouclée à retour unitaire représenté sur la figure 13.
On donne: A=20, Km 0, 2 (rd.s 1 N 1 m 1 )et Tm 4.10 2 (s). Pour C(p) : voir la suite.
On considère un correcteur proportionnel C(p)=Kp
Question 6.8. En posant β(p)=H 1 (p). βc (p) - H 2 (p).Cr(p), écrire, en fonction de Kp , les expressions de H 1 (p) et H 2 (p) puis les mettre sous formes canoniques et donner pour H 1 (p) la pulsation propre ωn et le facteur d’amortissement z en fonction de Kp.
Question 6.9. Donner sans calcul l’écart statique du à la consigne βc(t) pour une entré échelon de valeur β 0 en justifiant votre réponse.
Question 6.10. Déterminer l’expression (en fonction de Kp) de l’écart en régime permanent e pour
βc(t) = β0. h(t) et Cr(t)=C0. h(t) (β 0 et C 0 sont des constantes).
bC ( ) p b ( )^ p
Cr(p)
C(p)
m p m
K
1 T .p
Figure 13 : schéma fonctionnel à retour unitaire
A=
ZOOM
0 0,0 4 0,0 8 0, 12 0, 16 0, 2 0, 24 0, 28 0, 32 0, 34
900 800 700 600 500 400 300 200 100 0^ (s)
(rd/s)
Question 6.11. En posant Cr(t)=0, déterminer la valeur de Kp pour avoir une réponse la plus rapide à une entrée échelon de consigne βc(t)= β0. h(t). En déduire t (^5) % le temps de réponse à 5%. (Utiliser la relation : ωn .t (^5) % = 3 valable uniquement pour cette question).
Question 6.12. Donner la FTBO=G 1 (p) en laissant apparaitre Kp.
On donne sur la figure14 , les diagrammes de Bode de G 1 (p) pour Kp=1,
Question 6.13. Relever sur ces diagrammes (figure 14), la marge de phase et la marge de gain et déterminer graphiquement Kp60 : la valeur maximum de Kp qui permet d’avoir une marge de phase de 60 degré pour le système.
Question 6.14. La correction proportionnelle permet-elle de satisfaire le cahier des charges de la figure 9.
On considère maintenant le correcteur proportionnel intégral C(p)= c c
c
K 1 T .p T .p
On donne Tc 0.56s , Km 0, 2 (rd.s 1 N 1 m 1 ) et Tm 4.10 2 (s).
Figure14 : Diagrammes de Bode de G 1 (p) pour Kp=
50^10 -^1 1 10 102 0
_- 50
- 100
- 90°
- 100°
- 120°
- 140°
- 160°
- 180°_
1 10 102 103
ω (rd/s)
ω (rd/s)
Gain (dB)
Phase (degré)
bC ( ) p c b ( )^ p c c K 1 T .p T .p
m p m
K
1 T .p
Figure 15.
A=
Cr ( ) p
On pose maintenant : C(p) = c c c
c
K 1 T .p avec T 7.8 s
T .p et Kc = 2,
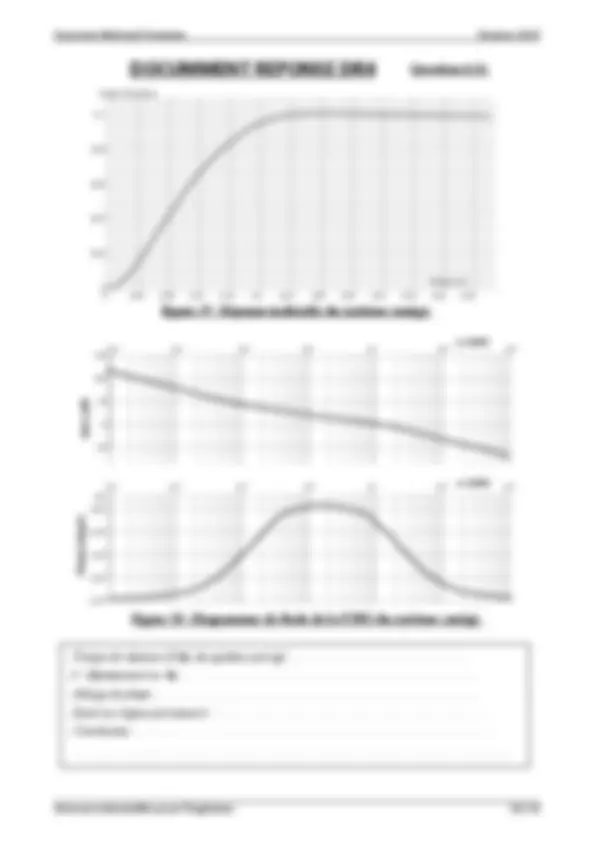
Question 6.21. Sur le document réponse DR4 sont donnés : la réponse indicielle du système corrigée par ce dernier correcteur (figure 17) et les diagrammes de Bode de la FTBO du système ainsi corrigé (figure 18). A partir de ces courbes et sur le document réponse DR4 :
- Donner le temps de réponse à 5 % _du système corrigé.
- Donner la valeur du 1er_^ dépassement en %_.
- Déterminer la marge de phase en faisant apparaitre son tracé sur la courbe.
- Donner l’écart en régime permanent.
- Conclure quant au respect du cahier des charges._
FIN DE L’ENONCE
DOCUMMENT ANNEXE 1
Diagramme des exigences du système 4Control
req [ Modèle ] [Exigences système Active drive] ]
<< Requirement >> id="1.1" Text=" communiquer avec l’ESP et l’ABS"
<< Requirement >> id="1" Text=" Diriger les roues arrière du véhicule automobile"
<< Requirement >> id="1. 2 " Text=" communiquer avec les capteurs de vitesses des roues"
<< Requirement >> id="1.5" Text= "Assurer la stabilité du véhicule ‘’ A grande vitesse, augmenter le rayon de courbure de la trajectoire.
<< Requirement >> id="1. 3 " Text="permettre le pivotement des deux roues arrières par rapport à la caisse du véhicule
<< Requirement >> id="1. 3 .1" Text=" Permettre le montage du système sur l’essieu arrière"
<< Requirement >> id="1.4" Text= "Assurer une bonne maniabilité du véhicule’’ A petite vitesse, diminuer le rayon de courbure de la trajectoire.
<< Requirement >> id="1. 4 .2" Text=" Pivoter les roues arrière dans le même sens que celui des roues avant pour des vitesses du véhicule supérieures à 60km/h"
<< Requirement >> id="1.4. 1 " Text=" Pivoter les roues arrière dans le sens opposé à celui des roues avant pour des vitesses du véhicule inferieures à 60km/h"
<< Requirement >> id="1.3. 2 " Text=" Réaliser une liaison pivot entre les portes fusées des roues arrière et l’essieu arrière"
<< Requirement >> id="1. 3. 3 " Text=" Assurer la motorisation de la liaison pivot avec l’essieu arrière"
Diagramme de cas d’utilisation.
uc [Modèle] diagramme de cas d’utilisation Système Active drive
Permettre de braquer automatiquement les roues arrière d’un Utilisateur^ véhicule^ automobile Assurer le confort des passagers <> Assurer la sécurité et la stabilité du véhicule
<>