


EECS 442 – Computer vision
Epipolar Geometry
• Why is stereo useful?
• Epipolar constraints
• Essential and fundamental matrix
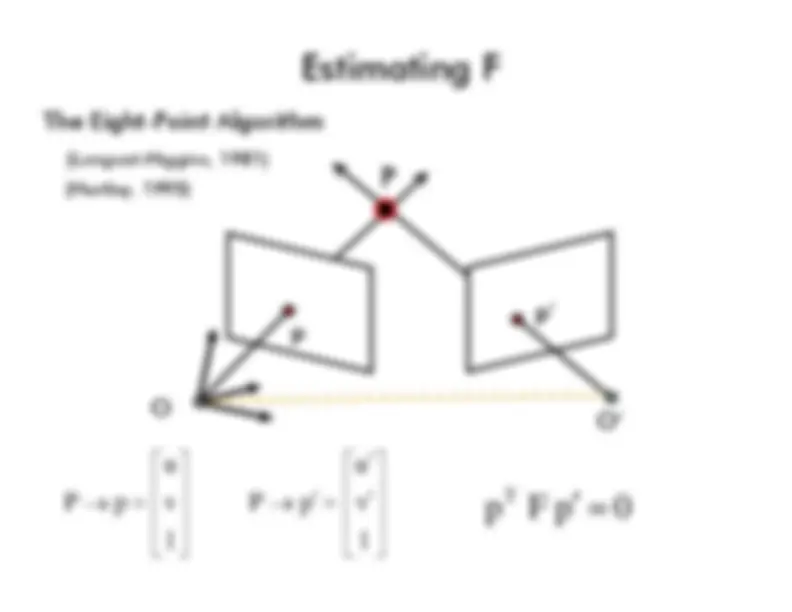
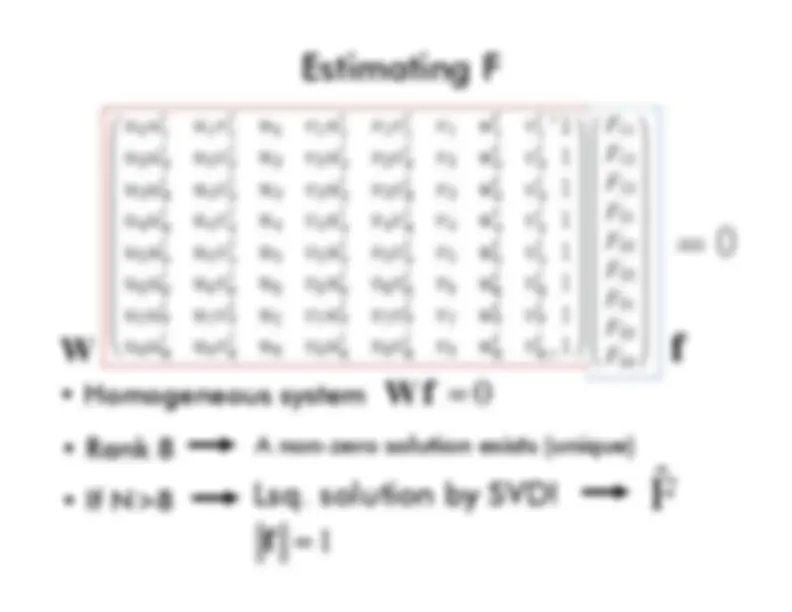
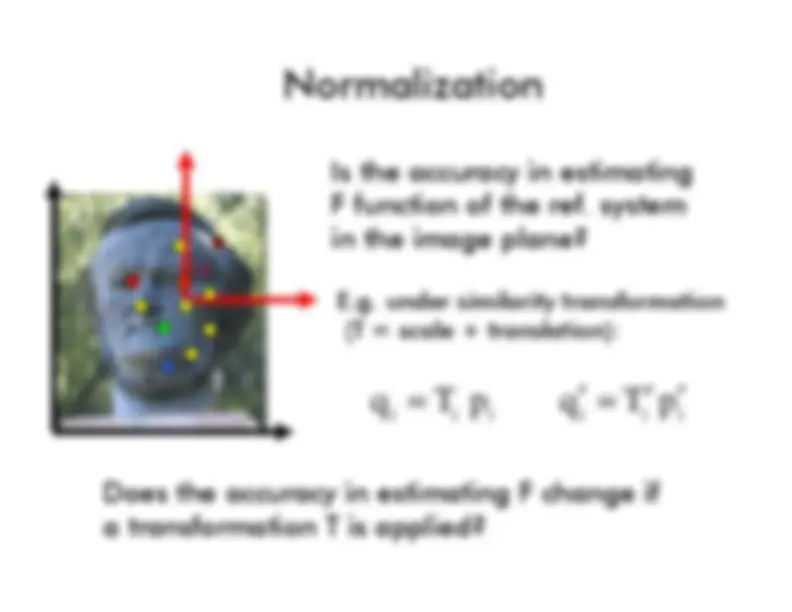
• Estimating F
•Examples
Reading: [AZ] Chapters: 4, 9, 11
[FP] Chapters: 10

























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The concept of epipolar geometry in computer vision, specifically in the context of stereo systems. It covers the usefulness of stereo, epipolar constraints, essential and fundamental matrices, and methods for estimating these matrices. The document also includes examples and references to related topics such as pinhole perspective projection and calibration. It is intended for students in the eecs 442 computer vision course.
Typology: Study notes
1 / 50

This page cannot be seen from the preview
Don't miss anything!
w
p Calibration rig Scene Camera K From calibration rigFrom points and lines at infinity+ orthogonal lines and planes → structure of the scene, K → location/pose of the rig, K Knowledge about scene ( point correspondences, geometry of lines & planes, etc…
Intrinsic ambiguity of the mapping from 3D to image (2D) Courtesy slide S. Lazebnik
Two eyes help!
2 2 2 1 1 2
1
2
1
2 X Triangulation
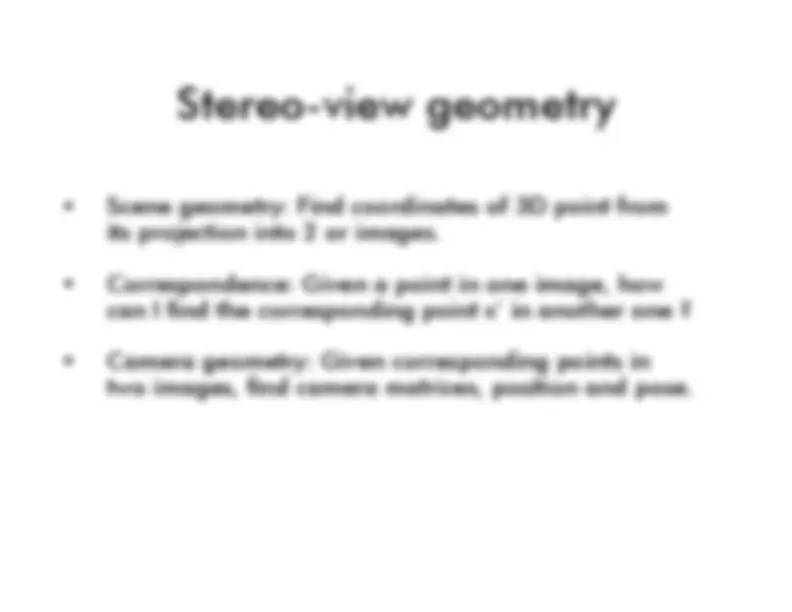
Stereo-view geometry
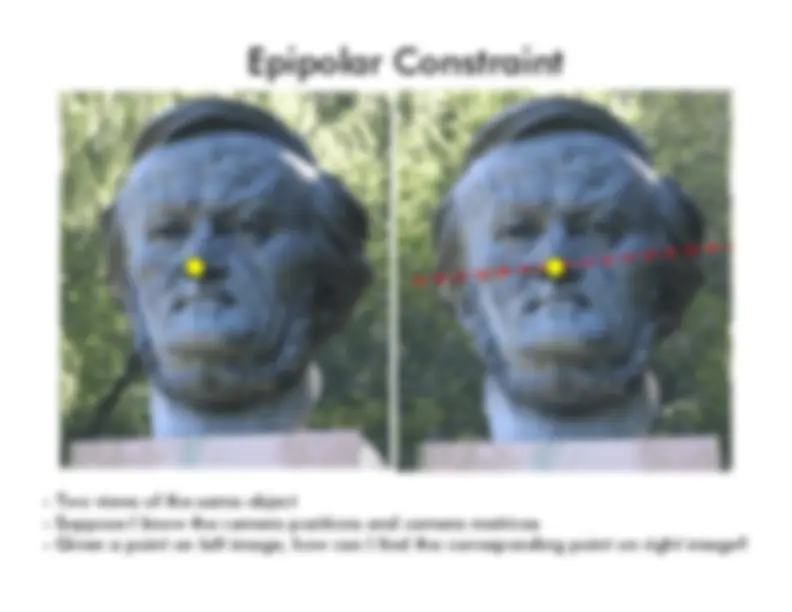
Scene geometry: Find coordinates of 3D point fromits projection into 2 or images. - Correspondence: Given a point in one image, how can I find the corresponding point x’ in another one? - Camera geometry: Given corresponding points intwo images, find camera matrices, position and pose.
Example: Converging image planes
1
2 X e 2 x 1 x 2 e 2 Example: Parallel image planes
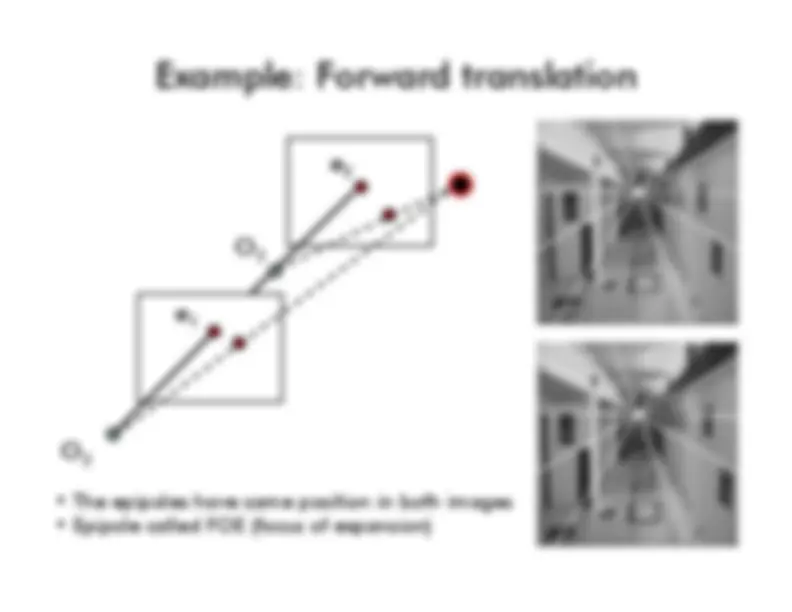
Example: Forward translation
2 e 1 e 2 O 2
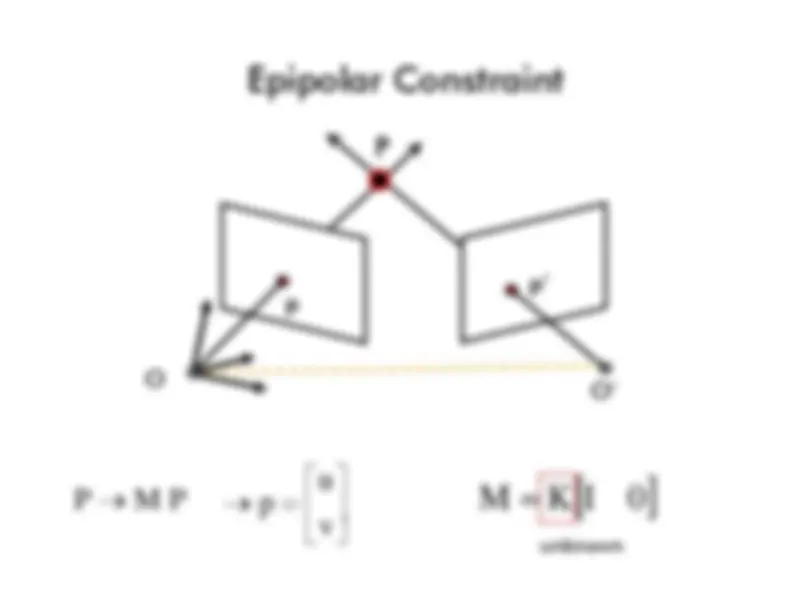
⎤ ⎥ ⎥ ⎥⎦ ⎡ ⎢ ⎢ ⎢⎣ = → u v^1 P M P [ ] 0 I K M =
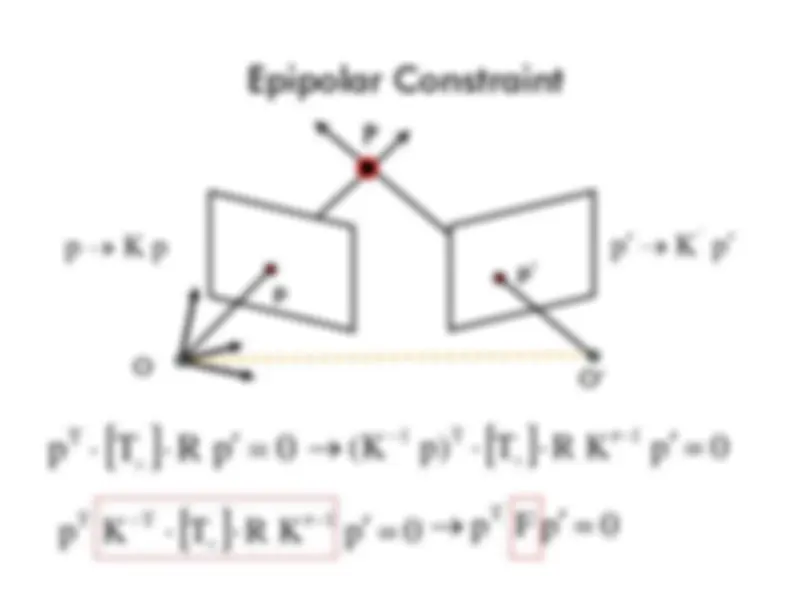
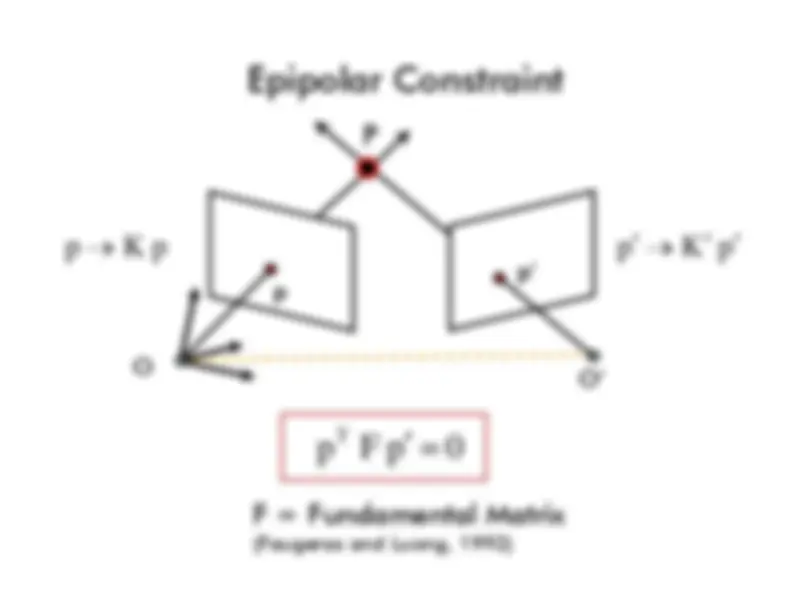
p p’ P R, T Epipolar Constraint [ ] T R K ' M = ⎤ ⎥ ⎥ ⎥⎦ ⎡ ⎢ ⎢ ⎢⎣ ′ ′ = ′ → u v^1 P M P
p p’ P R, T
K 1 and K 2 are known (calibrated cameras)
Perpendicular to epipolar plane
p p’ P R, T
= essential matrix(Longuet-Higgins, 1981)
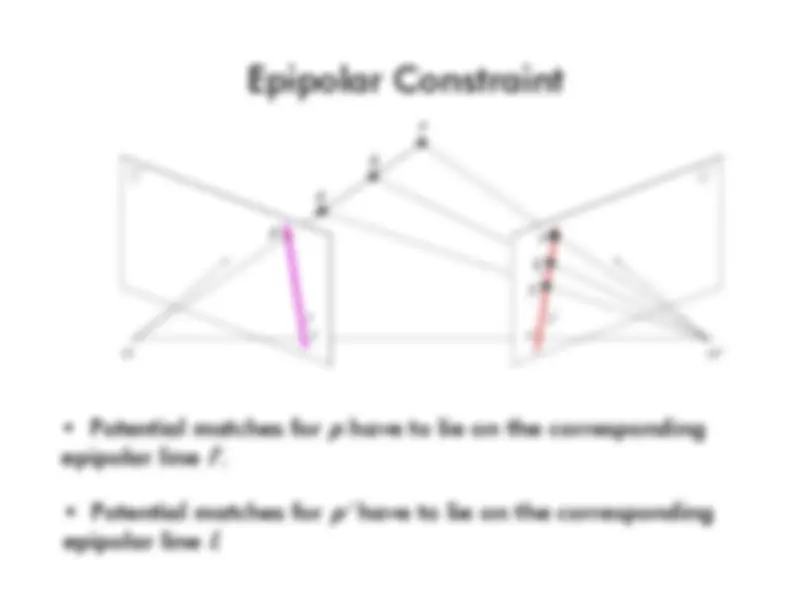
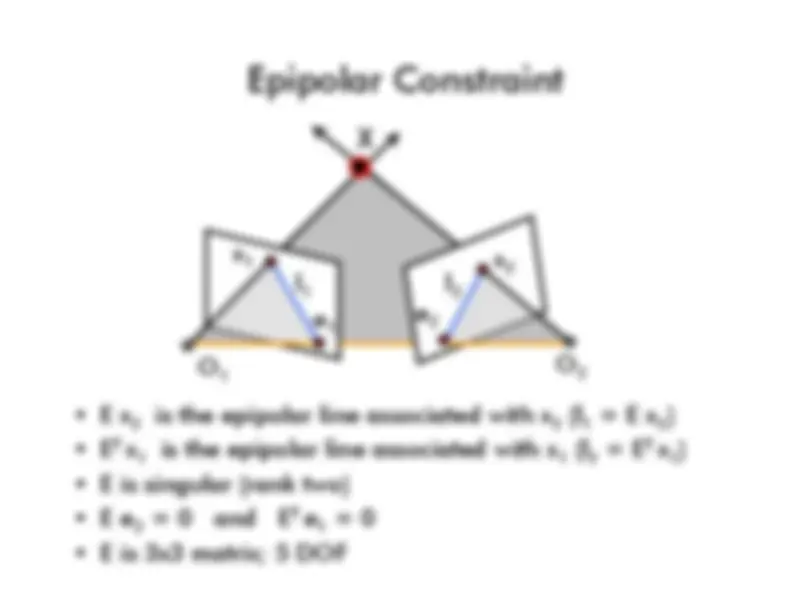
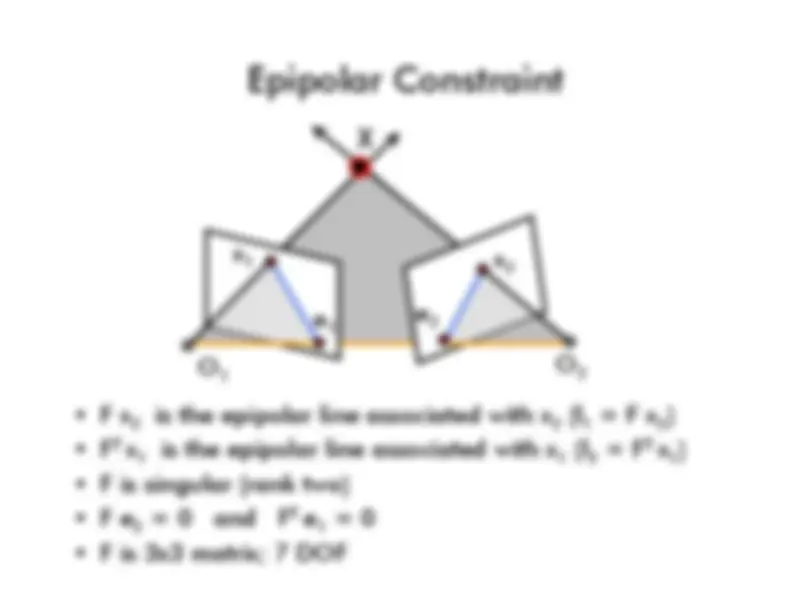
T x 1 is the epipolar line associated with x 1 (l 2
T x 1
and
T e 1
2 x 2 X x 1 e 1 e 2 l 1 l 2