



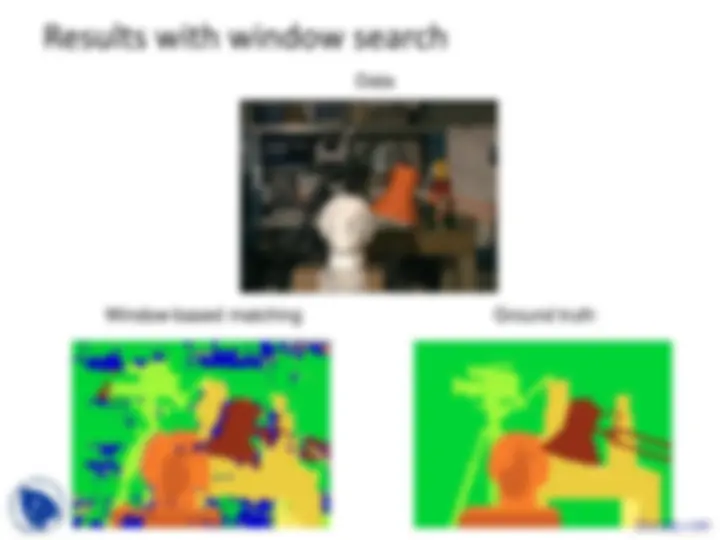
Stereo, Continued
Docsity.com
























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the Lecture Slides of Introduction to Computer Version which includes Machine Learning, Framework, Prediction Function, Feature Representation, Image, Desired Output, Prediction Function, Prediction Error, Predicted Value etc. Key important points are: Stereo, Depth From Disparity, Baseline, Human Stereopsis, Stereograms, Epipolar Geometry, Epipolar Constrai, Parallel Optical Axes, Calibrated Cameras, General Case
Typology: Lecture notes
1 / 46

This page cannot be seen from the preview
Don't miss anything!
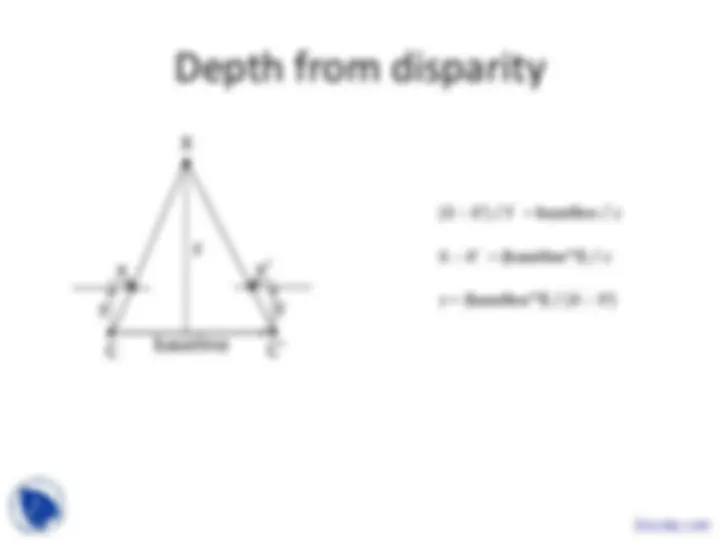
x’
z
f
x
C C’
X
baseline
f
(X – X’) / f = baseline / z
X – X’ = (baselinef) / z z = (baselinef) / (X – X’)
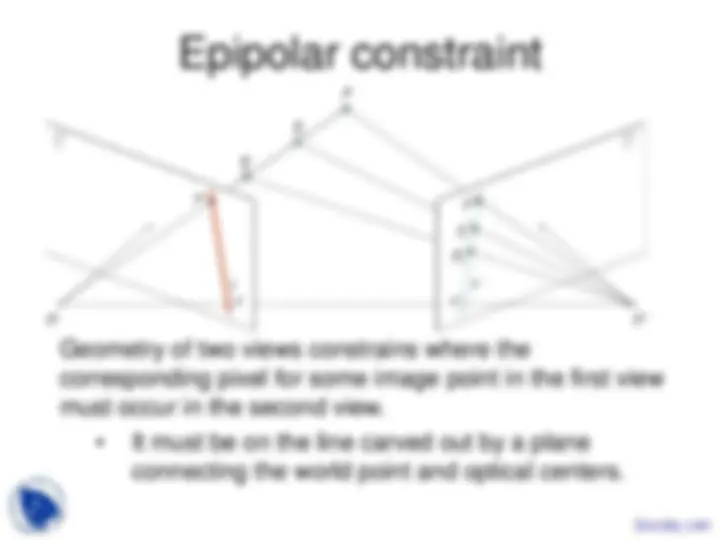
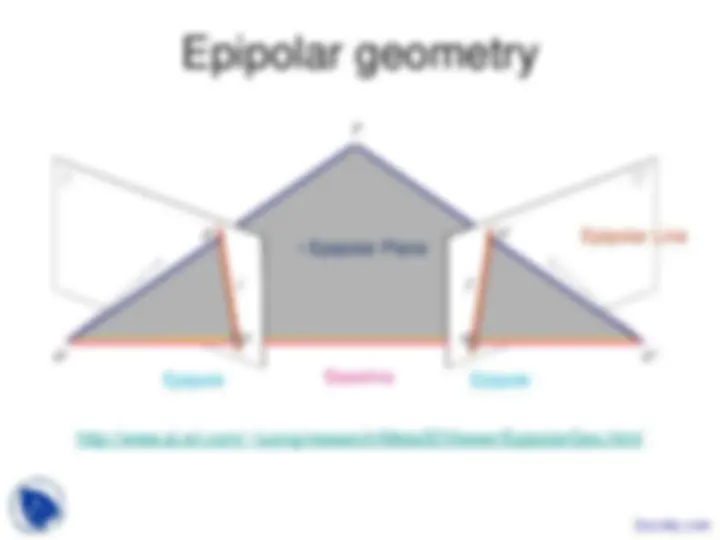
Epipole
Epipolar Line
Baseline
Epipole
http://www.ai.sri.com/~luong/research/Meta3DViewer/EpipolarGeo.html
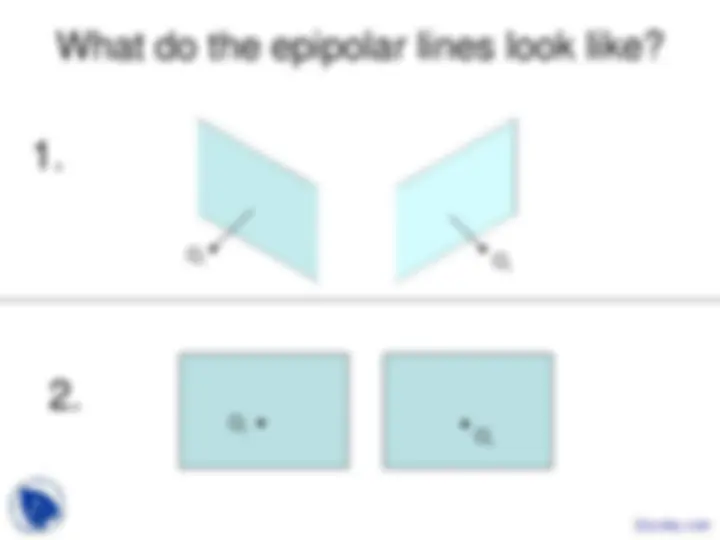
What do the epipolar lines look like?
Ol (^) Or
Ol (^) O r
Figure from Hartley & Zisserman
Example: parallel cameras
Where are the epipoles?
Docsity.com
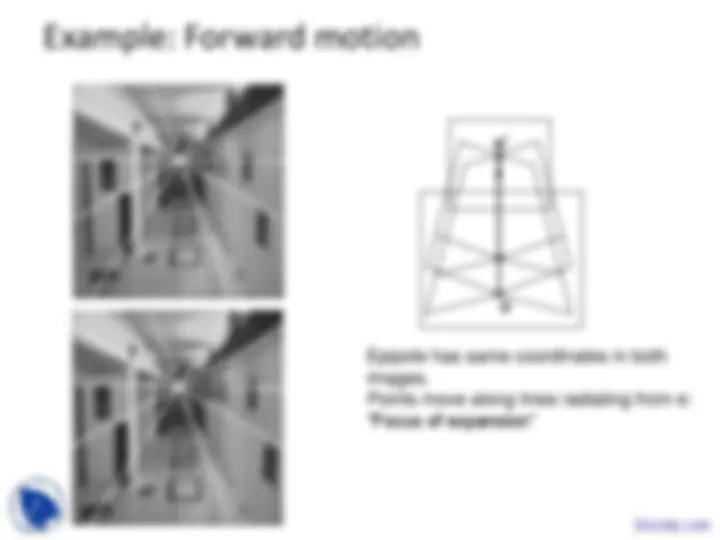
What would the epipolar lines look like if the camera moves directly forward?
Fundamental matrix
Let p be a point in left image, p’ in right image
Epipolar relation
Epipolar mapping described by a 3x3 matrix F
It follows that
l l‟ p (^) p‟
Fundamental matrix
This matrix F is called
Can solve for F from point correspondences