Download Induction Motors: Principles, Types, and Applications and more Essays (university) Electrical Engineering in PDF only on Docsity!
INTRODUCTION
An induction motor or asynchronous motor is an AC electric motor in which the
electric current in the rotor needed to produce torque is obtained by
electromagnetic induction from the magnetic field of the stator winding.
Three-phase squirrel-cage induction motors are widely used as industrial drives
because they are rugged, reliable and economical.
The induction motor is maintenance free. It has high overloading capacity.
Single-phase induction motors are used extensively for smaller loads, for household
appliances like ceiling fans. Although traditionally used in fixed-speed applications,
induction motors are increasingly being used with variable-frequency drives (VFDs)
in variable-speed applications like in cranes, lifts, cement plants, ceramic plants,
food processing industries etc.
VFDs offer energy savings opportunities for existing and prospective induction
motors in variable-torque centrifugal fan, pump and compressor load applications.
Construction of Induction Motor
A three phase Induction motor mainly consists of two parts called as the Stator and Rotor.
(a) Stator
It is the stationary part of the induction motor.
The stator is built up of high-grade alloy steel laminations to reduce eddy current losses.
It has three main parts, outer frame, stator core and a stator winding.
o Outer frame
It is the outer body of the motor. Its main function is to support the stator core and to protect the inner parts of the machine.
For small machines, the outer frame is casted, but for the large machine, it is fabricated.
Outer
Frame
S t a t o r S l o t s
Stator Core
Stat
or
Windi
ng
Terminal Box
Base
o Stator Core
Figure 1.2Outer frame of an induction motor
The core of the stator carries three phase windings which are usually supplied from a three-phase supply system.
The stator core is built of high-grade silicon steel stampings.
Its main function is to carry the alternating magnetic field which produces hysteresis and eddy current losses.
The stampings are fixed to the stator frame. Each stamping are insulated from the other with a thin varnish layer.
Laminated Core
End Ring
Conductors
Shaft
o Wound rotor
(Slip ring rotor)
Figure 1.3 Squirrel cage rotor
A wound rotor is built with a polyphase distributed winding similar tothat of stator winding and wound with the same number
of poles as, the stator.
The terminals of the rotor winding are connected to insulated slip rings mounted on the shaft.
Carbon brushes bearing on these rings make the rotor terminals available external to the motor,
Wound-rotor induction machines are relatively uncommon, being found only in a limited number of specialized applications.
This type of motors are widely used where high starting torque is required.
The cost and size of this type motor is more and large respectively.
Conductors
Winding
Shaft
Brushes
Figure 1.4 Wound rotor
Production of RMF (Rotating Magnetic Field)
When stationary three phase winding coils are supplied by an alternating 3-phase supply then uniform Rotating Magnetic
Field (or Flux) [RMF] of constant value is produced.
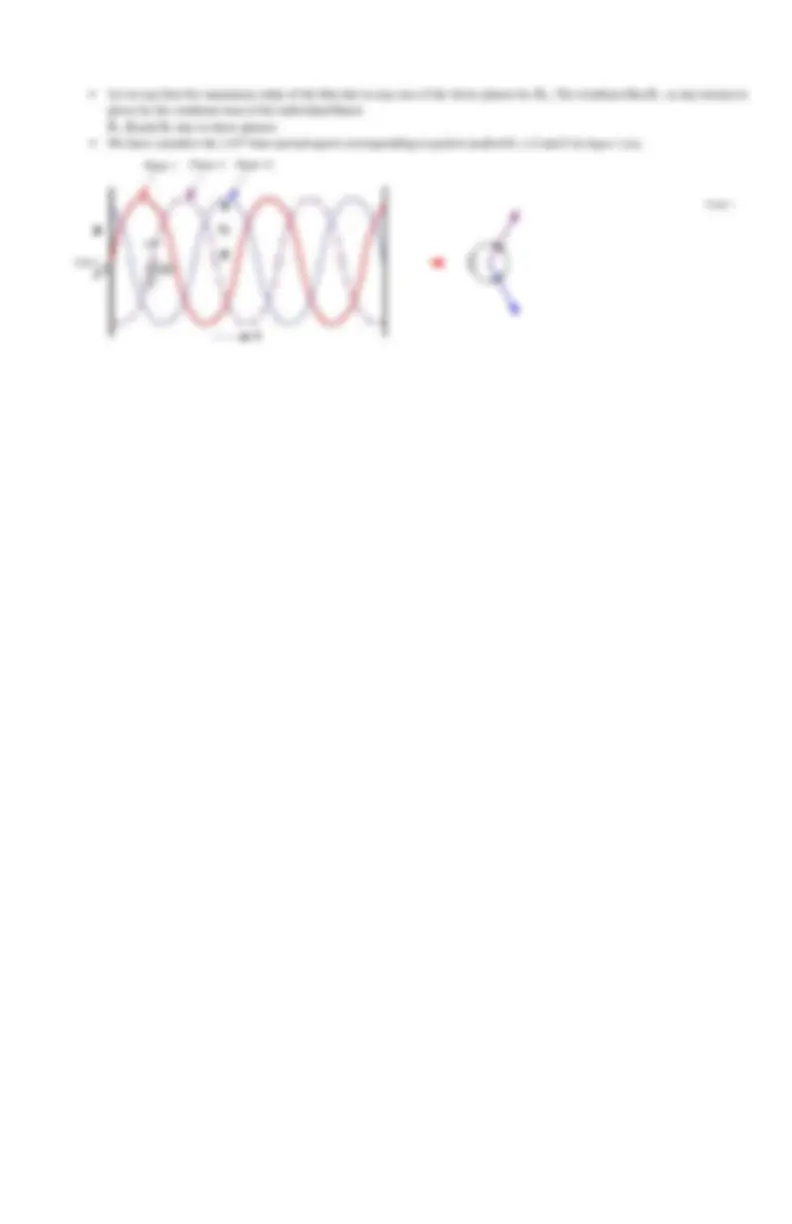
The principle of a three phase, two pole stator having three identical winding coils are placed by 120
0
electrical (Space) degree
apart. The flux (Sinusoidal) due to three phase windings is shown in below Figure 1.5 (b)
The directions of the positive fluxes are shown individually below at different positions.
m
Let us say that the maximum value of the flux due to any one of the three phases be ∅ 𝑚
. The resultant flux ∅ 𝑟
, at any instant is
given by the resultant sum of the individual fluxes
1
2
and ∅ 3
due to three phases
We have consider the 1/
th
time period apart corresponding to points marked 0, 1, 2 and 3 in Figure 1.5(a).
Phase -I
Phase -II Phase -III
Phase-II
Phase-I
120
0
120
0
2 2 2 cos
m m
m
cos 60
m
2 2 m
m
4 m
2 2 2 cos
m
m
m
cos 60
m
2 2 m
m
4 m
When = 0
0
Resultant flux ,
(At point 0)
r
m
When =
Resultant flux ,
0
(At point 1))
r
m
2 2 2 cos
m
m
m
cos 60
m
2 2 m
m
4 m
2 2 2 cos
m
m
m
cos 60
m
2 2 m
m
4 m
When =
Resultant flux ,
0
(At point 2)
r
m
When =
Resultant flux ,
0
(At point 3))
r
m
Rotor
Force as conductor
Rotor Conductor
Stator
M o t i o n o f c o n d u c t o r r e l a t i v e t o f i e l d
Rotor
Rotation of field Flux Direction
Figure 1.10(a) Figure 1.10 (b)
Stator
Rotation of field Flux
Figure 1.10 (c) Figure 1.10(d)
By completing the rotor circuit either using end rings or external resistances the induced emf causes current to flow in the
conductor.
By using right hand rule we can determine the direction of induced current in the conductor.
By using right hand rule the direction of the induced current is outwards (shown as dot) in Figure 1.10 (b).
The current in the rotor conductor produces its own magnetic field as shown in Figure
1.10 (c).
We know that when a current carrying conductor put in a magnetic field a force is produced. This force is produced on the
rotor conductor.
The direction of this force can be calculated by using left-hand rule as shown in Figure 1.10(d).
It is seen that the force acting on the conductor is in the same direction as the direction of the rotating magnetic field.
The rotor conductor is in a slot on the circumference of the rotor, the force acts in a tangential direction to the rotor and
develops a torque in a rotor.
Similarly, torque produces in all the rotor conductors.
Since, the rotor is free to move then it rotates in the same direction as the rotating magnetic field. Thus, three phase induction
motor is self-starting motor.
Performance parameters of poly phase induction motor
Following parameters are considered as performance parameters:
(a) Slip
An induction motor never run at synchronous speed.
Let us consider for moment that is rotor of induction motor is rotating at synchronous speed.
Under this condition, the rotor conductors could not cut the flux, so there is no production of generated voltage, current and
torque.
Therefore, rotor speed is slightly less than the synchronous speed. There is no relative speed between field flux and rotor
speed.
The difference between the synchronous speed and actual speed of rotor is known as Slip or Slip speed.
If 𝑁 𝑠
= Synchronous speed in r.p.m.
N = Actual speed of rotor in r.p.m.
Slip speed , s N
s
N
So that Slip , s
N
s
N
N
Percentage slip
N
s
N
N
The slip at full load varies value about 5 percent for small motors to about 2 percent for large motors.
(b)Frequency of Rotor Voltage and Current
The frequency of current and voltage in the stator is same as the supply frequency given by,
𝑠
The frequency in the rotor winding is variable and depends on the difference between the synchronous speed and rotor speed.
The rotor frequency is given by,
f
P ( N
s
N )
r
Also ,
f
r
N
s
N
f N
s
s
N
s
N
N
s
f
r
sf
Rotor current frequency = slip ⨯ supply frequencysupply frequency
When the rotor is stand-still, N=
s
N
s
N
N
s
= 1 and f
r
f
Z Z
ksE R
2 2
R
2
2
s
X
2
2
2
R 2
s
X 2
2
R sX
2
2
2
2
R sX
2
2
2
2
Rotor current per phase ,
I
2 s
s
E
2
Z
2 s
sE
2
R
sX 2
2 2
E
2
Power factor at slip s ,
cos
2 s
R
2
R
2
Z
2 s
(d)Torque
Basic Principle of motor is to convert electrical power into mechanical power. So, that induced torque (electromechanical
torque or developed torque) in induction motor depends on the rotor current, rotor power factor and rotating flux.
The torque is given by,
T
ind
I
2
cos
2
Where ,
Rotating flux
I
2
Rotor current per phase
cos
2
Rotor power factor
Now , rotor emf per phase at s tan dstill , E
2
2
T
ind or
E
2
I
2
cos
2
T
ind
kE
2
I
2
cos
2
(Where k is constant)
By putting the value of I
2
and cos f
2
, we get ,
T kE
sE
2
R
2
ind
s s
sE
R
kE
2
2
2
2
T
ind
N
m
R
2
sX 2
Case-IStarting torque
2 2
2 2
2 2
R
2
X
2
2 2
2
2
s
The torque developed by motor during starting period is called starting torque. At the time of starting induction
motor has slip=1.
Therefore, starting torque of induction motor can be obtained by putting slip=1 in torque equation.
To get maximum starting torque, by differentiating T st
w.r.t. R 2
and by putting
dT
st
dR
2
T
st
kR
2
R
2
X
2
(Assuming Supply voltage V is constant )
dT
R
2 R
2 2
s
k
2
2 2
R
2
X
2
2 2 R
2
X
2
R
2
X
R
2
X
2
2 2
2
2
2 R
2
2 2 2
R
2
X
2
R
2
X
2
So, the starting torque of an induction motor will be maximum when,
Rotor circuit resistance/phase = Standstill rotor reactance/phase.
Generally the rotor resistance is not more than 1 to 2 % of its leakage reactance for higher efficiency.
To get the high starting torque, extra resistance is added in the rotor circuit at the starting time and cut slowly as motor
get speed.
Case-IIRunning torque
The torque developed by the motor during running condition is called running torque. At the time of running, motor slip = s
So, the running torque of an induction motor at slip s,
ksR E
2
T
run
( N m )
R
2
sX 2
Now, torque will be the maximum if,
sR
2
R
2
s
2
X 2
o
r
R
2
R
2
or
2 R
is Zero.
2 2 2 s
X
2
2
X
2 R X
s
2
2 2
d
ksR
2 2
2 2
2
T
kR
E
2 2
k R V
2 2
2
T
f
R
2
s
2
X
2
and
T
f
ksR E
2
2 sX
T R
2
( sX )
2
ksE
2
max 2 2 2
sR
2
2 X
2
R
2
( sX )
2
Deviding the numerator and denominator by X
2
, 2 sR
2
X
2
T
f
X
2
T R
2
( sX )
2
max
T
f
2 2
2
2
2 s s
max
2
max max
s
2
Effect of change of supply voltage
We know that at the time of starting,
2
T
st
R
2
X
2
Since, E
2
V
2
T
st
2 2 2
R
2
X
2
Where k
2
is the another constant
T
st
V
2
X
In this mode of operation, by giving supply the motor always rotate below the synchronous speed.
The induction motor torque varies from zero to full load torque as the slip varies.
The slip varies from zero to one.
It is zero at no load and one at standstill. From the curve it is seen that the torque is directly proportional to the slip.
That is, more is the slip, more will be the torque produced and vice-versa.
The linear relationship simplifies the calculation of motor parameter to great extent.
o Generating Mode:
In this mode of operation induction motor runs above the synchronous speed and it should be driven by a prime mover.
The stator winding is connected to a three phase supply in which it supplies electrical energy.
Actually, in this case, the torque and slip both are negative so the motor receives mechanical energy and delivers electrical
energy.
An Induction motor is not much used as generator because it requires reactive power for its operation.
That is, reactive power should be supplied from outside and if it runs below the synchronous speed by any means, it consumes
electrical energy rather than giving it at the output. So, as far as possible, induction generators are generally avoided.
o Braking Mode:
In the braking mode, the two leads or the polarity of the supply voltage is changed so that the motor starts to rotate in the
reverse direction and as a result the motor stops. This method of braking is known as plugging.
This method is used when it is required to stop the motor within a very short period of time. The kinetic energy stored in the
revolving load is dissipated as heat.
Also, motor is still receiving power from the stator which is also dissipated as heat. So as a result of which motor develops heat
energy.
If load which the motor drives accelerates the motor in the same direction as the motor is rotating, the speed of the motor may
increase more than synchronous speed.
In this case, it acts as an induction generator which supplies electrical energy to the mains which tends to slow down the motor
to its synchronous speed, in this case the motor stops. This type of breaking principle is called dynamic or regenerative
braking.
Air-Gap Power
Pin 3VL IL cos
ind m
Pfw
P
Stray
Pcu (rotor )
P
P
i
cu ( stator )
Power Flow in 3-phase induction motor
P
AG
P
Conv
P
out
Load
m
Figure 1.18Power flow diagram of induction motor
An induction motor can be basically described as a rotating transformer.
Its input is a three-phase system of voltages and currents.
For an ordinary transformer, the output is electric power from the secondary windings.
The secondary windings in an induction motor (the rotor) are shorted out, so no electrical output exists from normal
induction motors. Instead, the output is mechanical.
The relationship between the input electric power and the output mechanical power of this motor is shown in the power-flow
diagram in Figure 1.
The input power to an induction motor Pin is in the form of three-phase electric voltage and current.
The first losses encountered in the machine are I
2
R losses in the stator windings (the
stator copper loss P cu(stator)
Then some amount of power is lost as hysteresis and eddy currents in the stator Pi. The power remaining at this point is
transferred to the rotor of the machine across the air gap between the stator and rotor.
This power is called the air-gap power PAG of the machine. After the power is transferred to the rotor, some of it is lost as l
2
R
losses the rotor copper loss P cu(rotor)
, and the rest is converted from electrical to mechanical form P out
Finally, friction and Windage losses Pfw and stray losses PStray are subtracted. The remaining power is the output of the motor
Pout.
The core losses do not always appear in the power-flow diagram at the point shown in
Figure 1.18.
Because of the nature of core losses, where they are accounted for in the machine is somewhat arbitrary.
The core losses of an induction motor come partially from the stator circuit and partially from the rotor circuit.