Download Input, Output Organization - Computer Architecture - Lecture Slides and more Slides Computer Architecture and Organization in PDF only on Docsity!
• Peripheral Devices
• Input-Output Interface
• Asynchronous Data Transfer
• Modes of Transfer
• Priority Interrupt
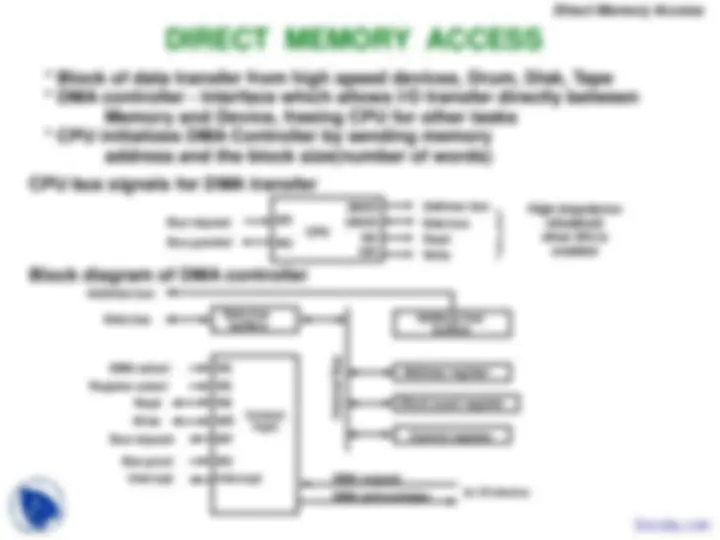
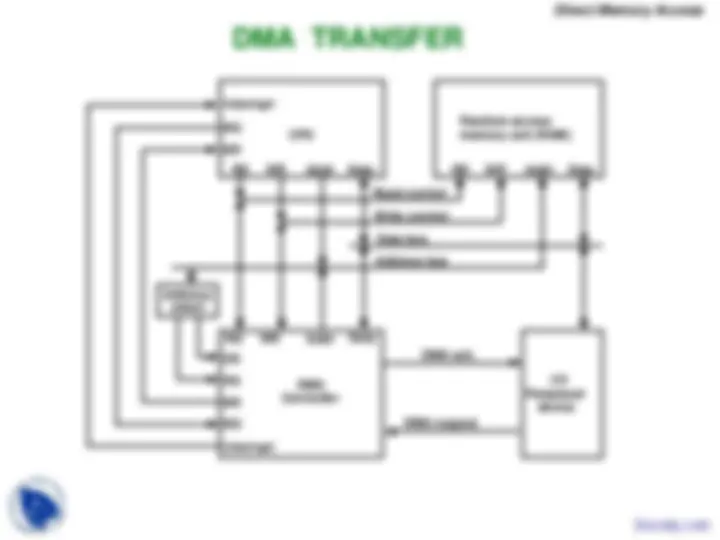
• Direct Memory Access
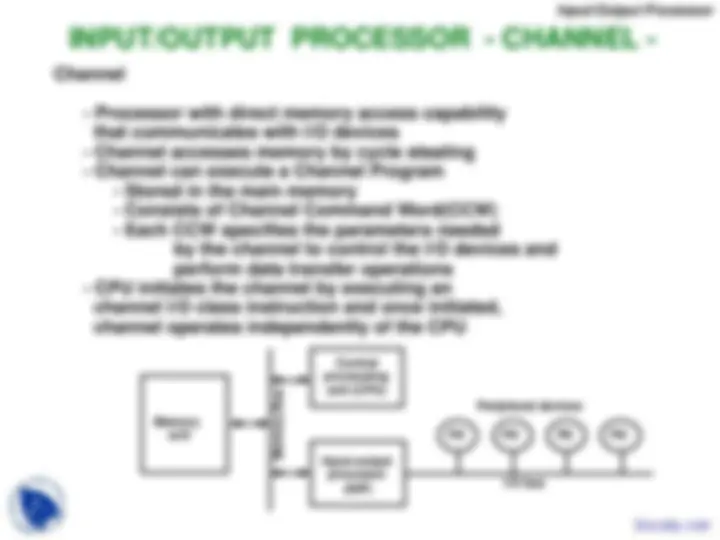
• Input-Output Processor
• Serial Communication
INPUT-OUTPUT ORGANIZATION
PERIPHERAL DEVICES
Input Devices
- Keyboard
- Optical input devices
- Paper Tape Reader
- Bar code reader
- Digitizer
- Optical Mark Reader
- Magnetic Input Devices
- Screen Input Devices
- Touch Screen
- Light Pen
- Mouse
- Analog Input Devices
Output Devices
- Card Puncher, Paper Tape Puncher
- CRT
- Printer (Impact, Ink Jet,
Laser, Dot Matrix)
Peripheral Devices
I/O BUS AND INTERFACE MODULES
Each peripheral has an interface module associated with it
Interface
- Decodes the device address (device code)
- Decodes the commands (operation)
- Provides signals for the peripheral controller
- Synchronizes the data flow and supervises
the transfer rate between peripheral and CPU or Memory
Typical I/O instruction
(Command)
Op. code (^) Device address Function code
Input/Output Interfaces
Processor
Interface
Keyboard and display terminal
Magnetic tape
Printer
Interface Interface Interface
Data Address Control
Magnetic disk
I/O bus
CONNECTION OF I/O BUS
Connection of I/O Bus to One Interface
Connection of I/O Bus to CPU
Input/Output Interfaces
I/O
bus
Op. code
Device address
Function code
Accumulator register
Computer I/O control
Sense lines
Data lines
Function code lines
Device address lines
CPU
I/O
bus
Device address
Command decoder
Function code
Data lines
Buffer register
Peripheral register
Status register
Sense lines
Output peripheral device and controller
AD = 1101 Interface
Logic
ISOLATED vs MEMORY MAPPED I/O
- Separate I/O read/write control lines in addition to memory read/write
control lines
- Separate (isolated) memory and I/O address spaces
- Distinct input and output instructions
Isolated I/O
Memory-mapped I/O
- A single set of read/write control lines
(no distinction between memory and I/O transfer)
- Memory and I/O addresses share the common address space
-> reduces memory address range available
- No specific input or output instruction
-> The same memory reference instructions can
be used for I/O transfers
- Considerable flexibility in handling I/O operations
Input/Output Interfaces
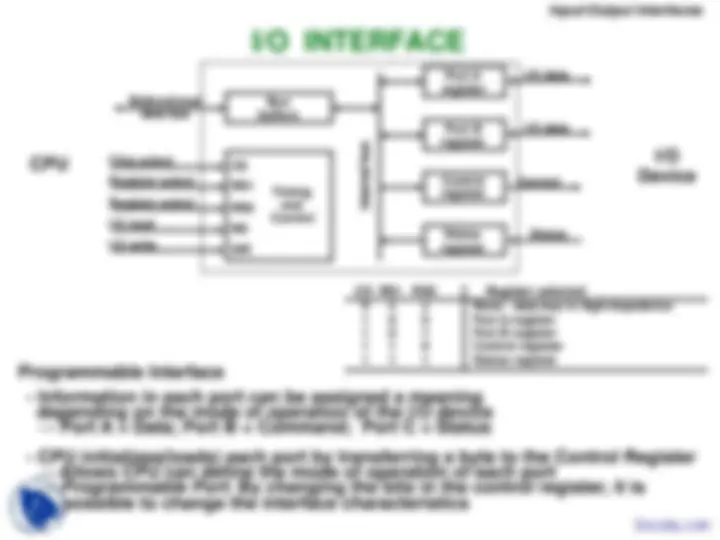
I/O INTERFACE
- Information in each port can be assigned a meaning
depending on the mode of operation of the I/O device
→ Port A = Data; Port B = Command; Port C = Status
- CPU initializes(loads) each port by transferring a byte to the Control Register
→ Allows CPU can define the mode of operation of each port
→ Programmable Port : By changing the bits in the control register, it is
possible to change the interface characteristics
CS RS1 RS0 Register selected 0 x x None - data bus in high-impedence 1 0 0 Port A register 1 0 1 Port B register 1 1 0 Control register 1 1 1 Status register
Programmable Interface
Input/Output Interfaces
Chip select
Register select
Register select
I/O read
I/O write
CS
RS
RS
RD
WR
Timing and Control
Bus buffers
Bidirectional data bus
Port A register
Port B register
Control register
Status register
I/O data
I/O data
Control
Status
CPU
I/O
Device
* Employs a single control line to time each transfer
* The strobe may be activated by either the source or
the destination unit
STROBE CONTROL
Source unit
Destination unit
Data bus
Strobe
Data
Strobe
Valid data
Block Diagram
Timing Diagram
Source-Initiated Strobe
for Data Transfer
Source unit
Destination unit
Data bus
Strobe
Data
Strobe
Valid data
Block Diagram
Asynchronous Data Transfer
Destination-Initiated Strobe
for Data Transfer
Timing Diagram
HANDSHAKING
Strobe Methods
Source-Initiated
The source unit that initiates the transfer has
no way of knowing whether the destination unit
has actually received data
Destination-Initiated
The destination unit that initiates the transfer
no way of knowing whether the source has
actually placed the data on the bus
To solve this problem, the HANDSHAKE method
introduces a second control signal to provide a Reply
to the unit that initiates the transfer
Asynchronous Data Transfer
DESTINATION-INITIATED TRANSFER USING HANDSHAKE
* Handshaking provides a high degree of flexibility and reliability because the
successful completion of a data transfer relies on active participation by both units
* If one unit is faulty, data transfer will not be completed
-> Can be detected by means of a timeout mechanism
Block Diagram
Timing Diagram
Source unit
Destination unit
Data bus
Ready for data
Data valid
Sequence of Events
Place data on bus. Enable data valid.
Source unit Destination unit
Ready to accept data. Enable ready for data.
Disable data valid. Invalidate data on bus (initial state).
Accept data from bus. Disable ready for data.
Ready for data
Data valid
Data bus
Valid data
Asynchronous Data Transfer
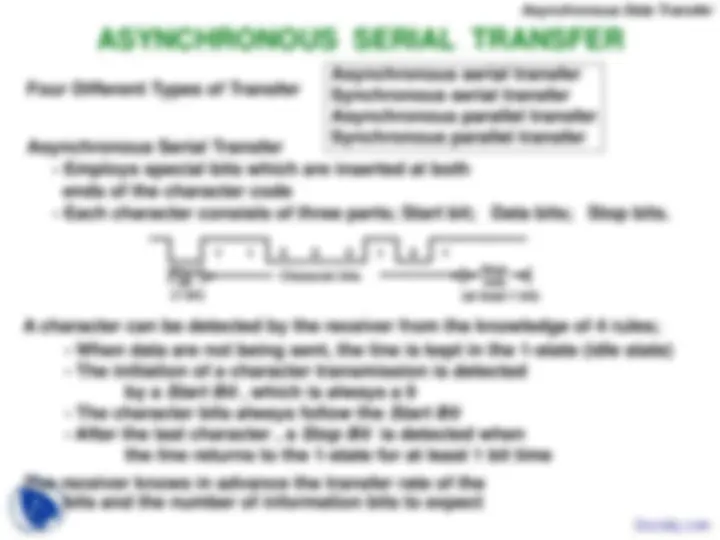
ASYNCHRONOUS SERIAL TRANSFER
Asynchronous serial transfer
Synchronous serial transfer
Asynchronous parallel transfer
Synchronous parallel transfer
- Employs special bits which are inserted at both
ends of the character code
- Each character consists of three parts; Start bit; Data bits; Stop bits.
A character can be detected by the receiver from the knowledge of 4 rules;
- When data are not being sent, the line is kept in the 1-state (idle state)
- The initiation of a character transmission is detected
by a Start Bit , which is always a 0
- The character bits always follow the Start Bit
- After the last character , a Stop Bit is detected when
the line returns to the 1-state for at least 1 bit time
The receiver knows in advance the transfer rate of the
bits and the number of information bits to expect
Four Different Types of Transfer
Asynchronous Serial Transfer
Start bit (1 bit)
Stop bits
Character bits
(at least 1 bit)
Asynchronous Data Transfer
FIRST-IN-FIRST-OUT(FIFO) BUFFER
* Input data and output data at two different rates
* Output data are always in the same order in which the data entered the buffer.
* Useful in some applications when data is transferred asynchronously
4 x 4 FIFO Buffer (4 4-bit registers Ri),
4 Control Registers(flip-flops Fi, associated with each Ri)
Asynchronous Data Transfer
4-bit register
S
R
F
F'
1
1
4-bit register
S
R
F
F'
2
2
4-bit register
S
R
F
F'
3
3
4-bit register
S
R
F
F'
4
4
F
F
S
R
F
F'
S
R
Clock Clock Clock Clock
Data output
Output ready
Delete
Data input
Insert
Input ready
Master clear
R1 R2 R3 R
MODES OF TRANSFER - PROGRAM-CONTROLLED I/O -
3 different Data Transfer Modes between the central
computer(CPU or Memory) and peripherals; (^) Program-Controlled I/O
Interrupt-Initiated I/O
Direct Memory Access (DMA) Program-Controlled I/O(Input Dev to CPU)
Modes of Transfer
Polling or Status Checking
- Continuous CPU involvement
- CPU slowed down to I/O speed
- Simple
- Least hardware
Read status register Check flag bit
flag
Read data register Transfer data to memory
Operation complete?
Continue with program
= 0
= 1
yes
no
CPU
Data bus
Address bus
I/O read
I/O write
Interface
Data register
Status register F
I/O bus
Data valid
Data accepted
I/O
device
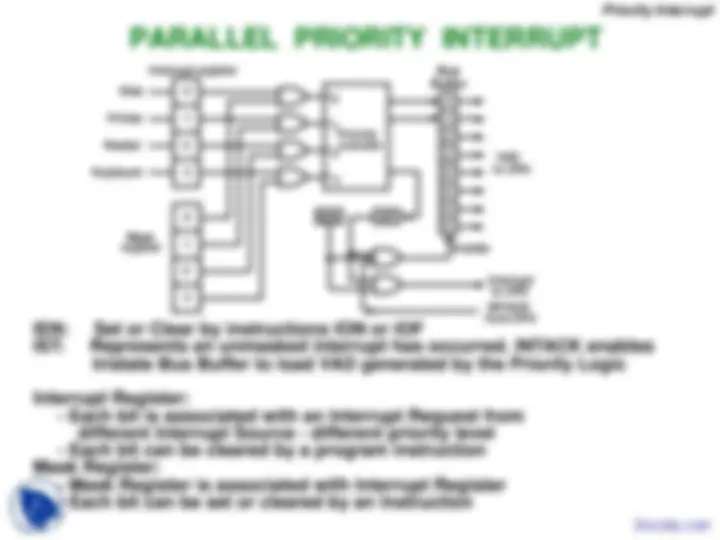
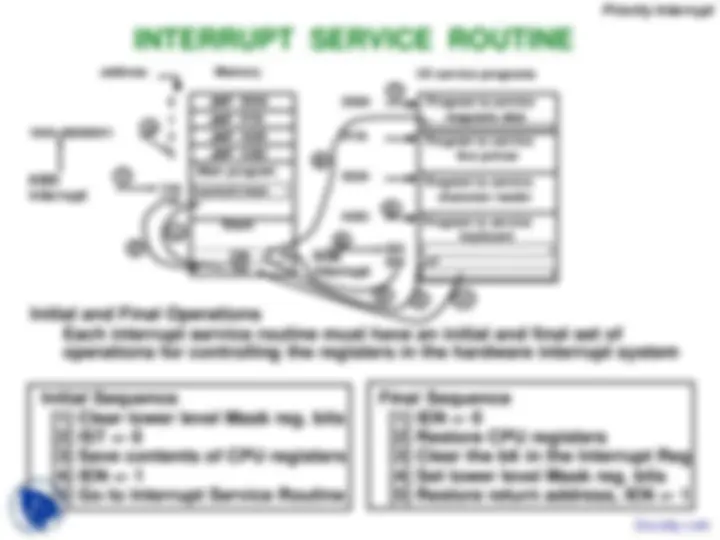
PRIORITY INTERRUPT
Priority Interrupt by Software(Polling)
- Priority is established by the order of polling the devices(interrupt sources)
- Flexible since it is established by software
- Low cost since it needs a very little hardware
- Very slow
Priority Interrupt by Hardware
- Require a priority interrupt manager which accepts
all the interrupt requests to determine the highest priority request
- Fast since identification of the highest priority
interrupt request is identified by the hardware
- Fast since each interrupt source has its own interrupt vector to access
directly to its own service routine
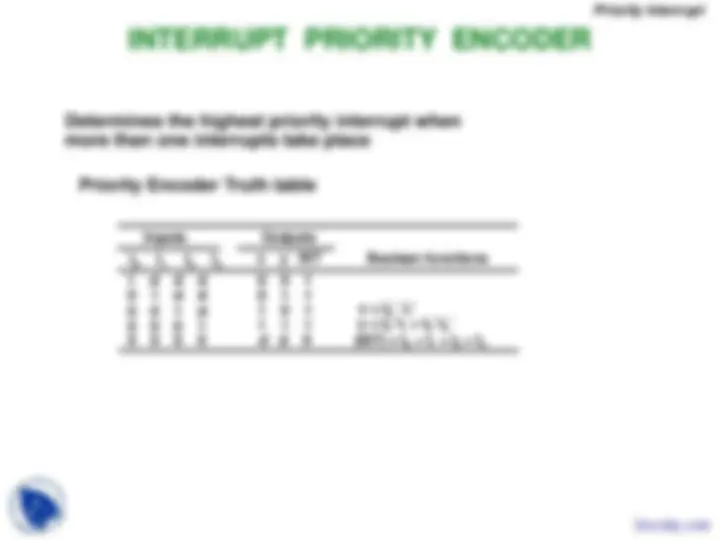
Priority
- Determines which interrupt is to be served first
when two or more requests are made simultaneously
- Also determines which interrupts are permitted to
interrupt the computer while another is being serviced
- Higher priority interrupts can make requests while
servicing a lower priority interrupt
Priority Interrupt
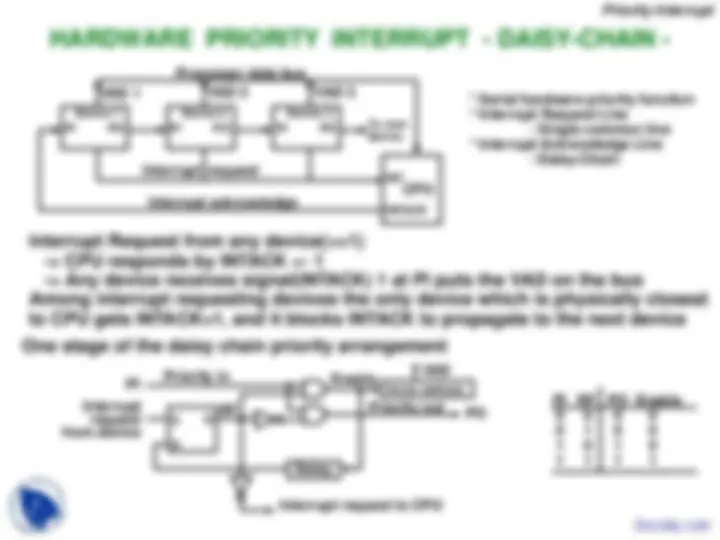
HARDWARE PRIORITY INTERRUPT - DAISY-CHAIN -
One stage of the daisy chain priority arrangement
PI RF PO Enable
Interrupt Request from any device(>=1)
-> CPU responds by INTACK <- 1
-> Any device receives signal(INTACK) 1 at PI puts the VAD on the bus
Among interrupt requesting devices the only device which is physically closest
to CPU gets INTACK=1, and it blocks INTACK to propagate to the next device
Priority Interrupt
Device 1 PI PO
Device 2 PI PO
Device 3 PI PO
INT
INTACK
Interrupt request
Interrupt acknowledge
To next device
CPU
VAD 1 VAD 2^ VAD 3
Processor data bus
* Serial hardware priority function
* Interrupt Request Line
* Interrupt Acknowledge Line
S
R
Q
Interrupt
request
from device
PI
Priority in
RF
Delay
Vector address
VAD
PO
Priority out
Interrupt request to CPU
Enable