



Engr/Math/Physics 25
Chp9: Integration
& Differentiation
Docsity.com





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the Lecture Slides of Computational Methods which includes Thévenin’s Equivalent Circuit, Circuit Simplification, Analysis of Power Transfer, Voltage Division, Analytical Game Plan, Array Operation, Element Operations, Number of Allowable Values etc.Key important points are: Integration and Differentiation, Finite Difference Methods, Data Integrals, Differentiation and Integration, Derivative Form, Newton’s 2nd Law, Independent Variable, Rate of Change, Value Formulations, Alternative
Typology: Slides
1 / 30

This page cannot be seen from the preview
Don't miss anything!
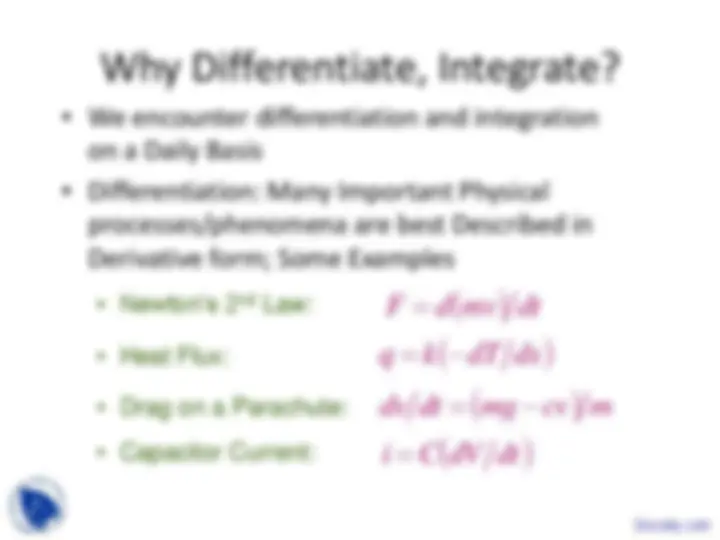
Chp9: Integration
& Differentiation
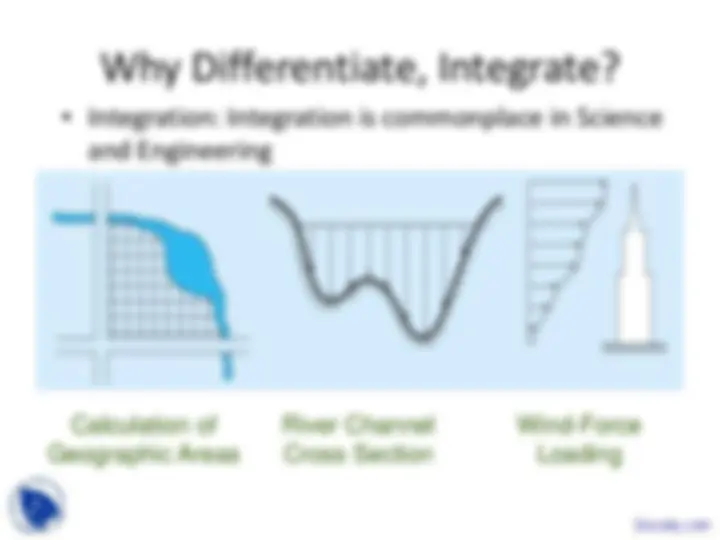
Calculation of Geographic Areas
River Channel Cross Section
Wind-Force Loading
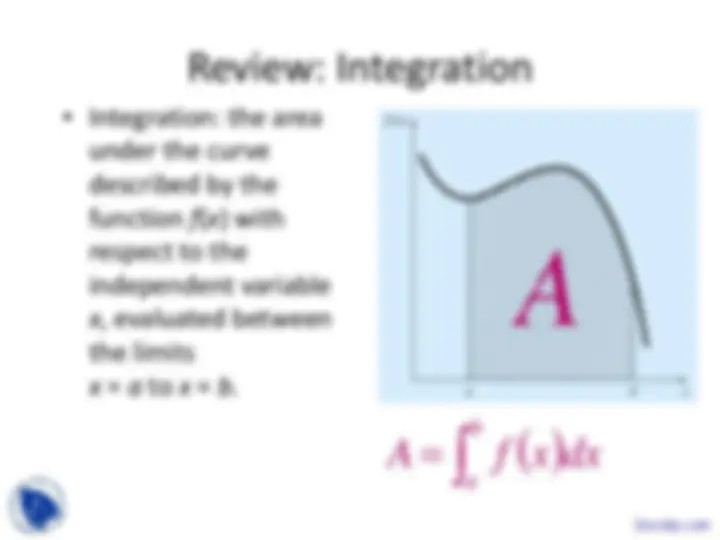
b
a
A f x dx
y x^ (^) g x dx^ f x Const
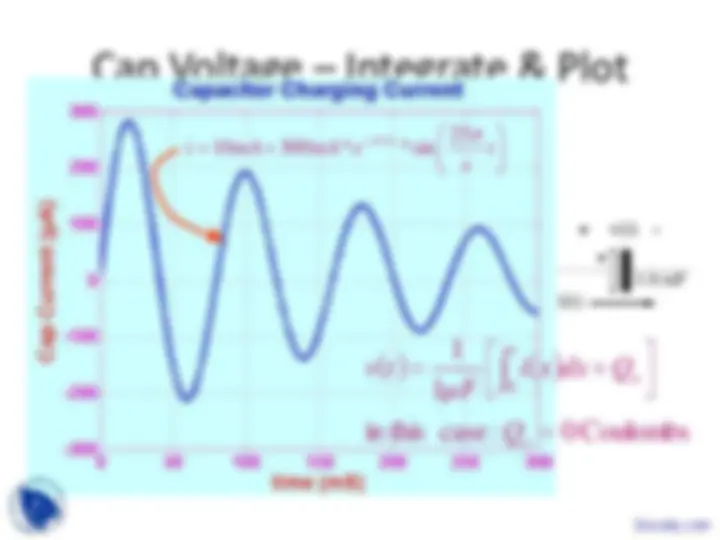
y t 0 g x dx f t y 0
t (^)
y t g x dx f t y
t
t
a
y
c b
^ ^ ^
c a
b c
b
^
^ ^
b a
b a
b a
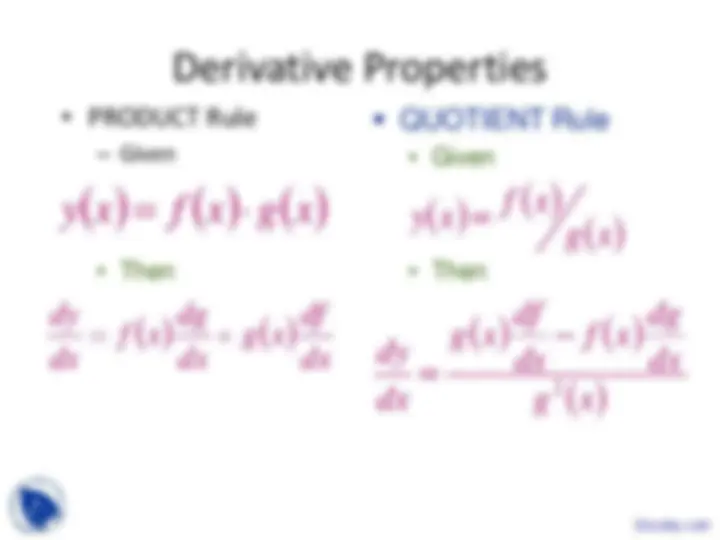
y x f x g x
dx
df g x dx
dg f x dx
dy
g x
f x y x
dx
dg f x dx
df g x
dx
dy 2
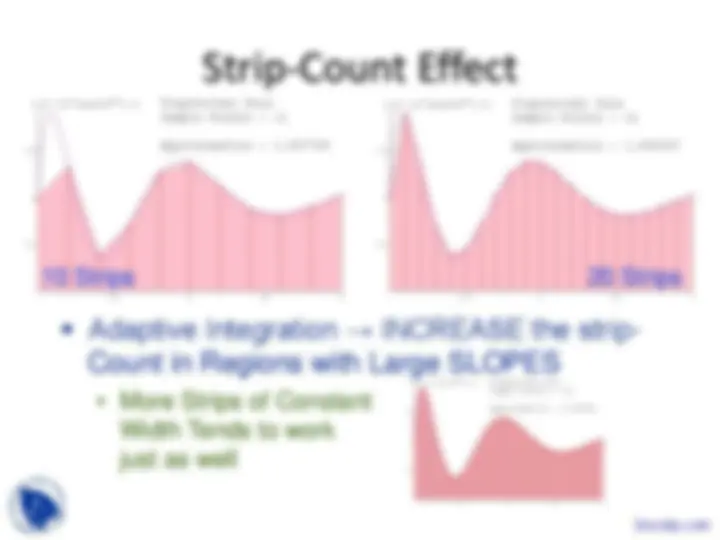
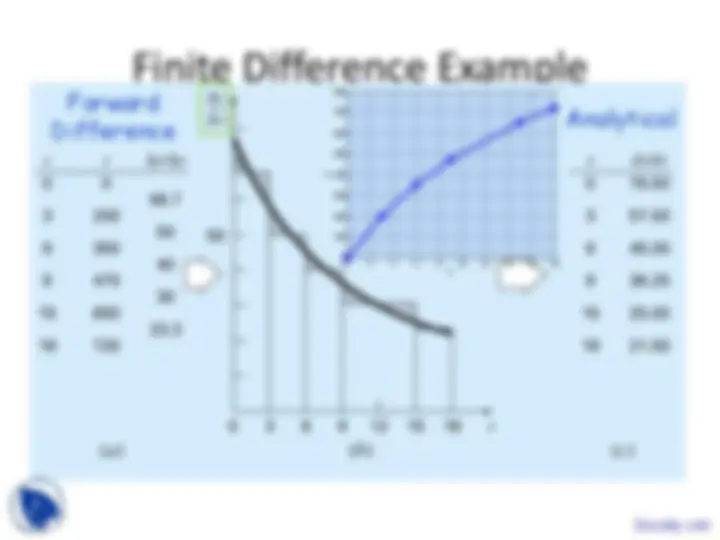
10 Strips 20 Strips
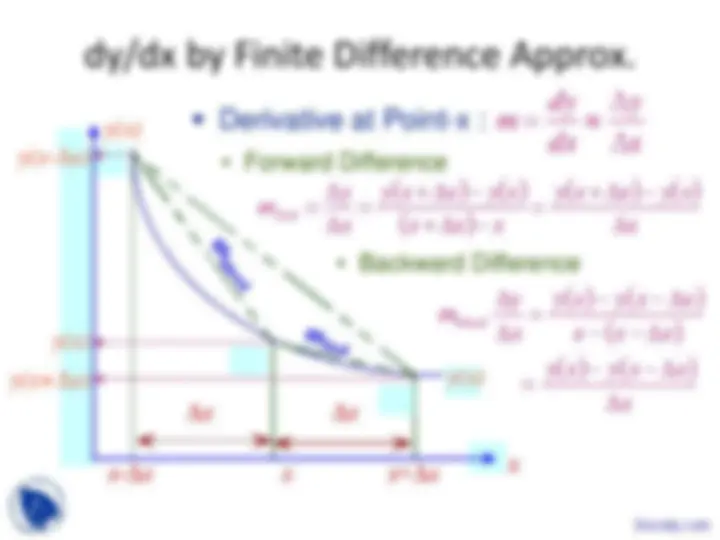
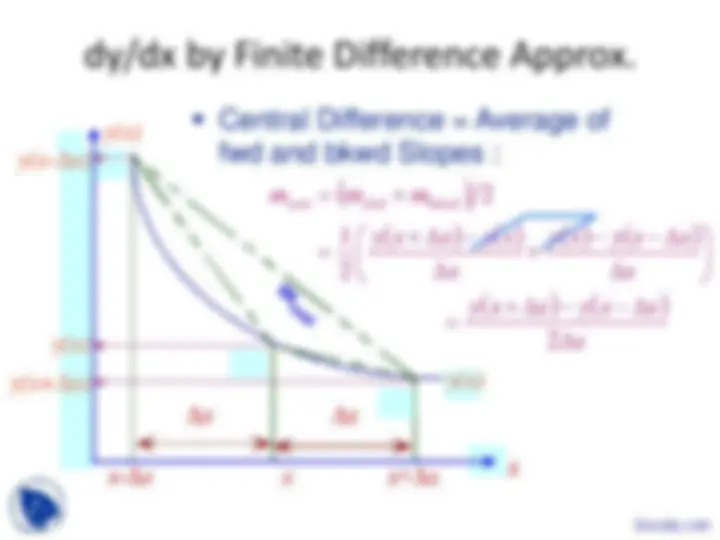
dy/dx by Finite Difference Approx.
y(x)
y(x)
y(x-Δx)
y(x)
y(x+Δx)
x
y dx
dy m
x
y x x y x x x x
y x x y x x
y mfwd
x
y x y x x
x x x
y x y x x x
y mbkwd
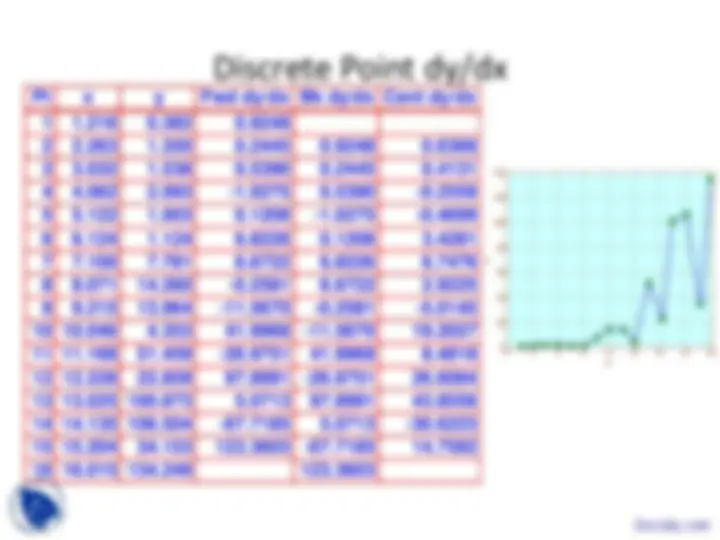
dy/dx by Discrete-Point Difference
1 1
1 1
n n n
n n n y y y y y y y y
x x x x x x x x
n n
n n
fwd
fwd
x x x x
y y
x
y
dx
dy
n
(^1)
1
dy/dx by Discrete-Point Difference
1 1
1 1
n n
n n
cent
cent
x x x x
y y
x
y
dx
dy
n
1
1
n n
n n
bkwd
bkwd
x x x x
y y
x
y
dx
dy
n
Discrete Point dy/dx Pt x y Fwd dy/dx Bk dy/dx Cent dy/dx 1 1.216 0.382 0. 2 2.263 1.350 0.2445 0.9248 0. 3 3.032 1.538 0.5390 0.2445 0. 4 4.062 2.093 -1.0275 0.5390 -0. 5 5.122 1.003 0.1208 -1.0275 -0. 6 6.124 1.124 6.8226 0.1208 3. 7 7.100 7.781 6.6722 6.8226 6. 8 8.071 14.260 -0.2581 6.6722 2. 9 9.215 13.964 -11.5670 -0.2581 -5. 10 10.046 4.353 41.9968 -11.5670 19. 11 11.168 51.459 -26.9751 41.9968 8. 12 12.228 22.859 97.8991 -26.9751 26. 13 13.025 100.873 5.0713 97.8991 43. 14 14.135 106.504 -67.7185 5.0713 -30. 15 15.204 34.153 123.3603 -67.7185 14. 16 16.015 134.249 123.
(^00 2 4 6 8 10 12 14 )
20
40
60
80
100
120
140
x
y
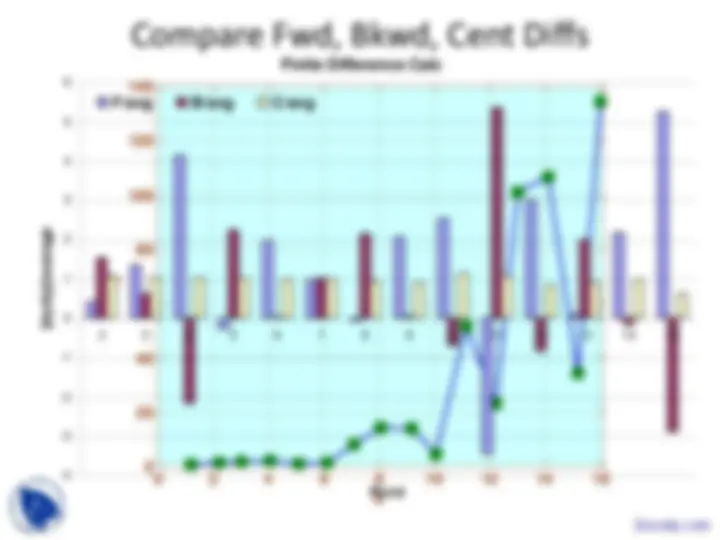
Compare Fwd, Bkwd, Cent Diffs
(^00 2 4 6 8 10 12 14 )
20
40
60
80
100
120
140
x
y
Finite Difference Calc
0
1
2
3
4
5
6
2 3 4 5 6 7 8 9 10 11 12 13 14 15
Point
[dy/dy]/average
F/avg B/avg C/avg