


Linear Control Systems
(EEN-412)
Week: 01→Lecture: 01, 02, 03
Engr. Dr. Ghulam Fareed Laghari
Robotics and Intelligent Systems (RIS)
Department of Electrical Engineering
Bahria University (BU)
H-11 Campus, ISLAMABAD





























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
summarize notes from control system engineering by norman nise 7 edition chap 2
Typology: Summaries
1 / 64

This page cannot be seen from the preview
Don't miss anything!
Engr. Dr. Ghulam Fareed Laghari Robotics and Intelligent Systems (RIS) Department of Electrical Engineering Bahria University (BU) H-11 Campus, ISLAMABAD
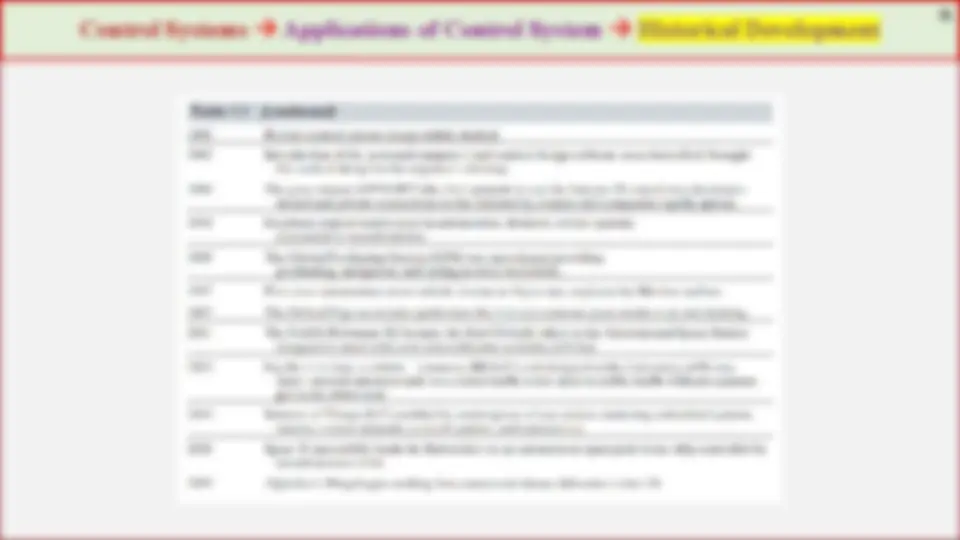
[continued…]
[continued…]
➢This course provides students with a strong foundation in linear control systems ▪ Focusing on their role in robotics and intelligent systems ➢Students will: ▪ Explore the modeling of dynamic systems using transfer functions and state-space methods ▪ Study system response in time and frequency domains ▪ Apply classical stability analysis techniques. ➢Emphasis is placed on: ▪ Designing and implementing feedback controllers to:
th
th
th
nd
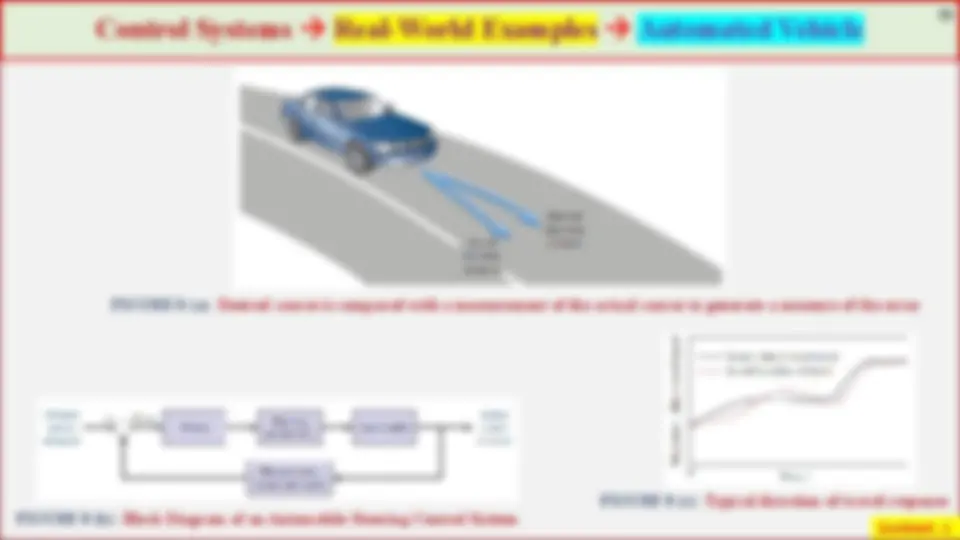
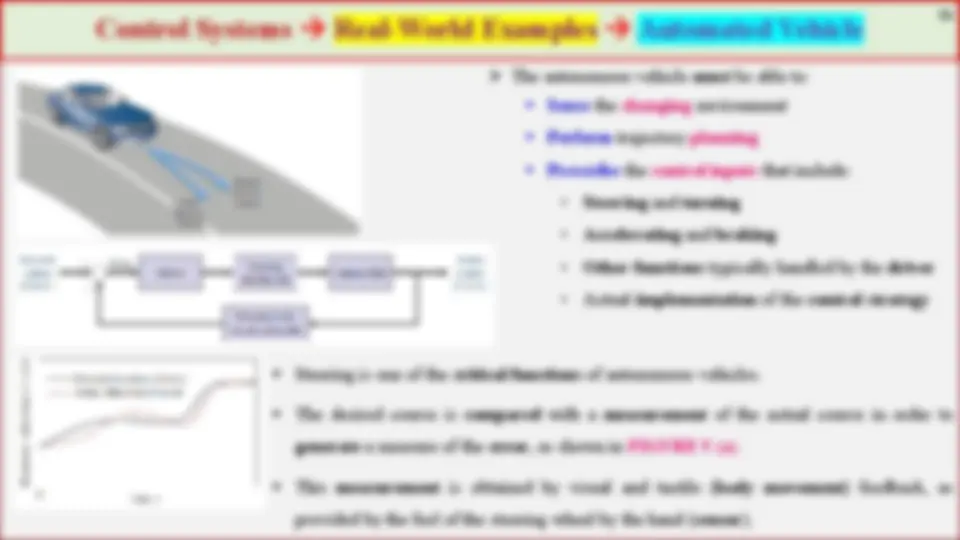
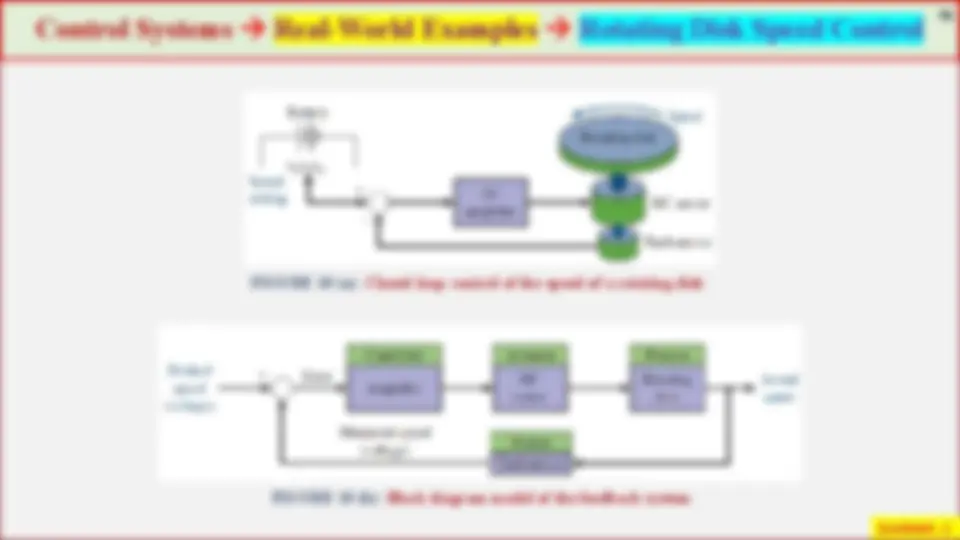
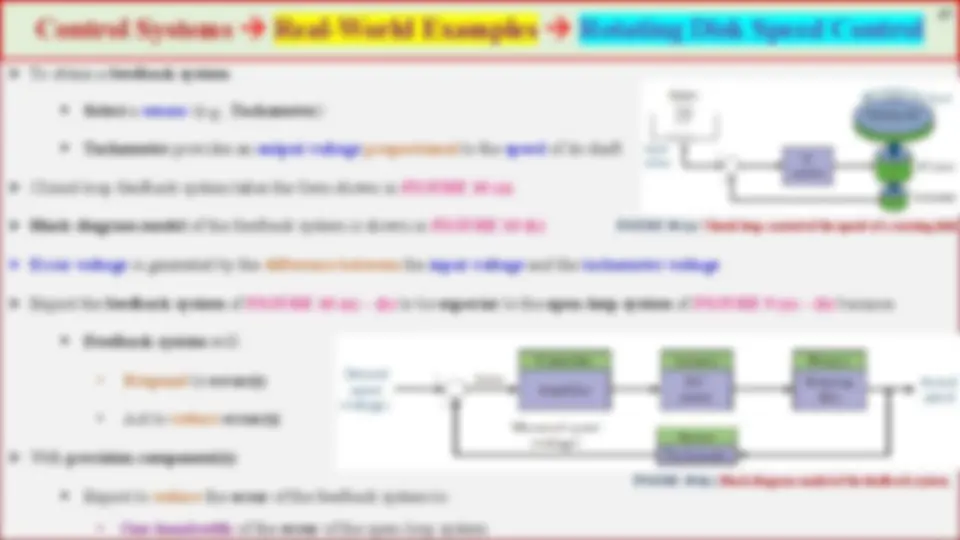
▪ Linear Systems ▪ Linear and Nonlinear Systems ▪ Control Systems → Definition ▪ Control Systems → Components / Constituents ▪ Control Systems → EXAMPLE: Elevator System ▪ Control Systems → Performance Measures of a Control System ▪ Control Systems → Advantages of Control Systems ▪ Control Systems → Applications of Control System ▪ Control Systems → System Configurations → Open-Loop Control Systems ▪ Control Systems → System Configurations → Closed-Loop/Feedback Control Systems ▪ Control Systems → Real-World Examples → Automated vehicles ▪ Control Systems → Real-World Examples → Rotating disk speed control
Linear Systems → Explanation ➢A linear system satisfies the properties of both superposition and homogeneity. ➢These properties define how inputs relate to outputs in a predictable, proportional way. 1 ) SUPERPOSITION: ▪ The response of a system to multiple inputs is the sum of the responses to each input individually. ▪ Mathematical form: If 𝒙𝟏 → 𝒚𝟏 and 𝒙𝟐 → 𝒚𝟐 then: 𝒙𝟏 + 𝒙𝟐 → 𝒚𝟏 + 𝒚𝟐 ▪ Advantage: Helps us analyze complex inputs as the sum of simpler ones. 2 ) HOMOGENEITY (SCALING): ▪ Scaling ( multiplying ) the input by a factor scales ( multiplies ) the output by the same factor. ▪ Mathematical form: If 𝒙𝟏 → 𝒚𝟏 then for any constant 𝜶 : 𝜶𝒙𝟏 → 𝜶𝒚𝟏 ▪ Advantage: Ensures the system responds proportionally to changes in input.
Linear and Nonlinear Systems → Difference ➢ NONLINEAR SYSTEM: Any system that does not satisfy superposition or homogeneity. ❑ Nonlinear systems have other types of properties , depending on their nature: ▪ Stability properties
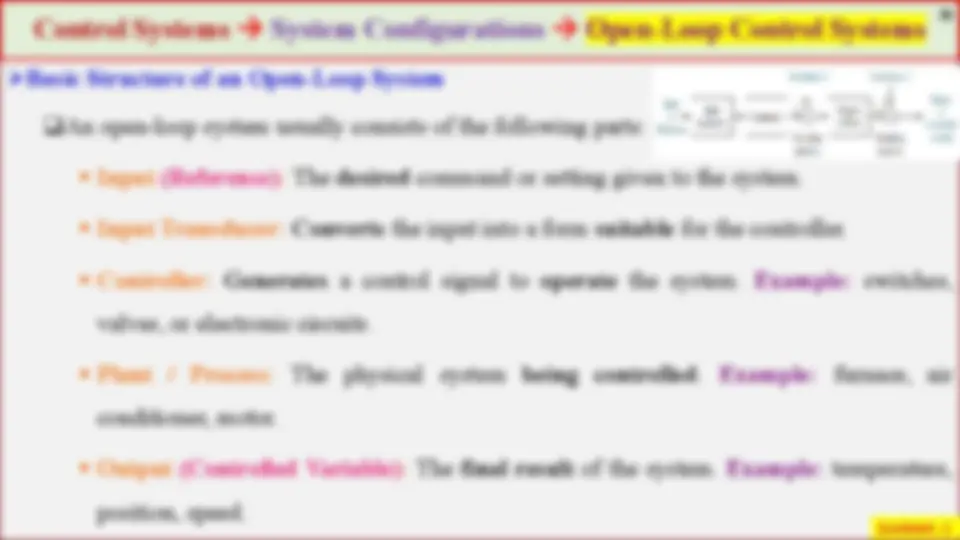
Control Systems → A Simple Explanation
What is a Control System? FIGURE 1: Process to be controlled by the system
Control Systems → Definition
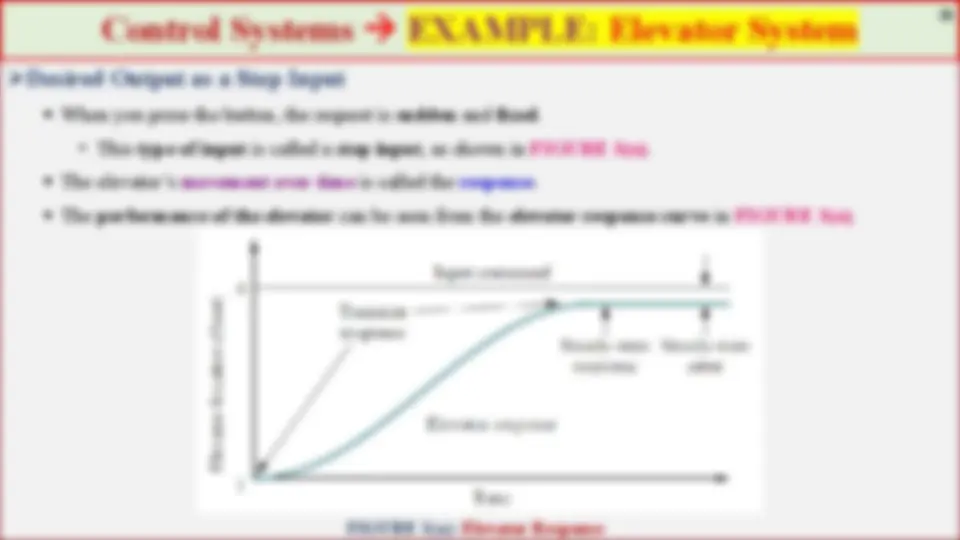
Control Systems → EXAMPLE: Elevator System ▪ You are on the 1st floor and press the 4th-floor button. ▪ Pressing the button is the input (what you want). ▪ The elevator moving upward is the system. ▪ Reaching the 4th floor stably and accurately is the output. ➢The elevator is designed to:
Control Systems → EXAMPLE: Elevator System ➢ Desired Output as a Step Input ▪ When you press the button, the request is sudden and fixed.