



Numerical Methods for Partial
Differential Equations
Docsity.com



























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The main points are: Finite Difference Methods, Gustafasson-Kreiss-Oliger, Equivalent Sections, Model Advection, Periodic Interval, Convergent Fourier Series, Time-Dependent Coefficient, Fourier Mode, Advection Equation
Typology: Slides
1 / 43

This page cannot be seen from the preview
Don't miss anything!
( ) [ ) [ ]
( ) ( ) [ )
0
given
(^1) ˆ ( ,0) = 0, 2 2
where is a smooth 2 -periodic function of one frequency
i x
u x t x t T
u u c t x
u x f x e f x
f
ω
π π
ω π π
π ω
∀ ∈ ∈
∂ ∂ − = ∂ ∂
= ∀ ∈
1 , ˆ , 2
i x u x t e u t
ω ω π
=
u u c t x
( )
(^1 1) ˆ ˆ , ˆ 2 2
ˆ ˆ^0
u u (^) i x i x du c c e u t e i cu t x t x dt
du i cu dt
ω ω ω ω π π
ω
∂ ∂ (^) ∂ ∂ (^) − = (^) − (^) = (^) − ∂ ∂ (^) ∂ ∂ (^)
⇒ − =
u ˆ (^) ( ω,0) = f ˆ( ω)
periodic we are able to deduce:
for the more general case when the initial
condition contains multiple Fourier modes:
( )
i x
i x ct
f x e f
u x t e f f x t
ω ω ω ω ω ω
=∞
=−∞ =∞
=−∞
∑
∑
when we reduced the PDE to an ODE:
both analytically and numerically (more about
this later on).
u u c t x
du i cu dt
( )
du i c d u dt
ic d t u u e
ω ω
( ) 2 ˆ ,
i ct x d t u u e e
ω ω
( )
( ) 2 ˆ ,
i ct x (^) d t u u e e
ω ω
( )
d^2 t u f ct x e
− ω = +
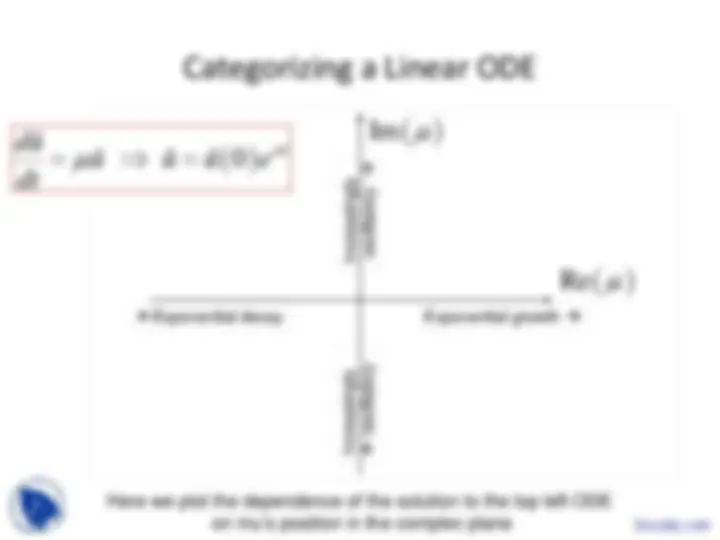
Exponential decay Exponential growth
Increasingly^ oscillatory
Increasingly
oscillatory
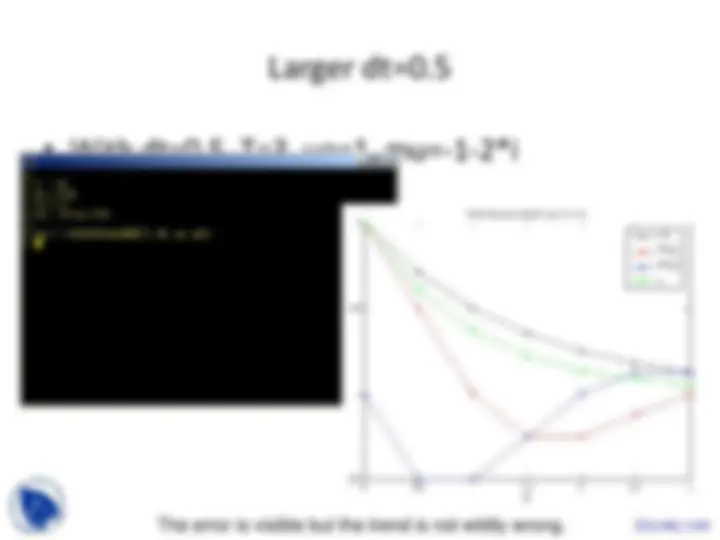
Here we plot the dependence of the solution to the top left ODE on mu’s position in the complex plane
du (^) t u u u e dt
μ
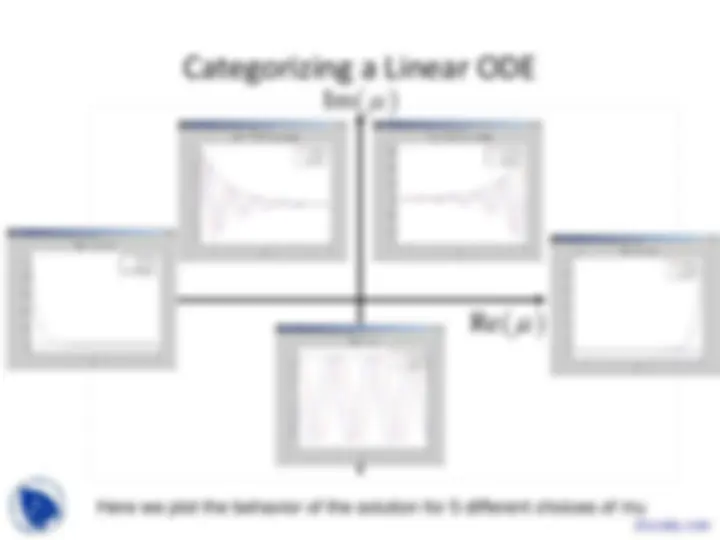
Here we plot the behavior of the solution for 5 different choices of mu
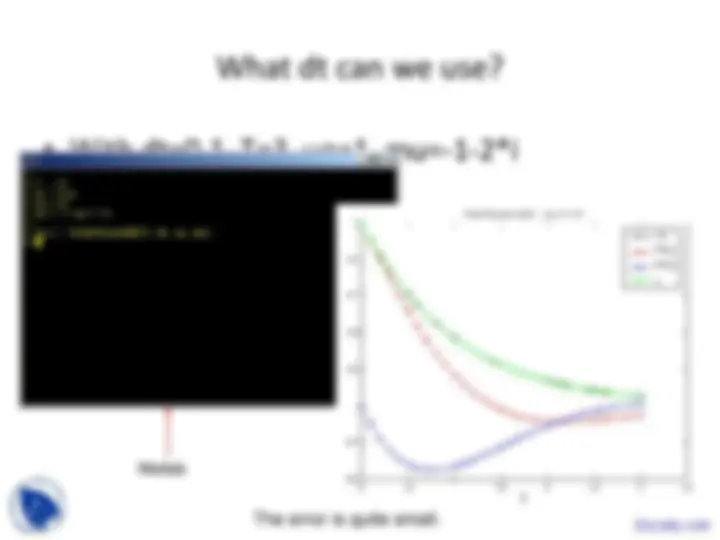
approximately.
this technique using the method of lines to approximate the solution of the PDE.
du u dt
into shorted subintervals, with width often
referred to as:
u(0) (and possibly u(-dt),u(-2dt),..) and build a
recurrence relation which approximates u(dt)
in terms of u(0) and early values of u.
dt , ∆ t or k
du f u dt
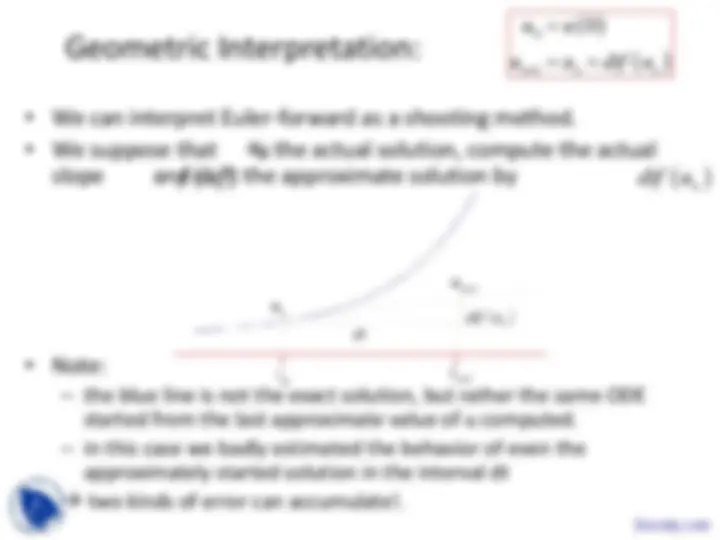
( ) ( ) ( (^ ))
0 0
u dt u f u dt
− ≅ u dt (^^ )^ ≅^ u^ (^0 )^ + dtf^ (^ u (^0 ))
u n
( )
( )
0
1 0 0
u u 0
u u dtf u
=
= +
un ≅ u ndt ( )
Docsity.com
( )
( )
( )
( )
0
1 0 0
2 1 1
1
0
n n n
u u
u u dtf u
u u dtf u
u (^) + u dtf u
=
= +
= +
= +