Download Loopshaping Design for Antenna Azimuth Control-Control System-Assignment Solved and more Exercises Control Systems Analysis in PDF only on Docsity!
i
Assignment 2
Loopshaping Design for Antenna Azimuth
Control
ii
Table of Contents
1. First Design ........................................................................................................................................... 1
2. Second Design ....................................................................................................................................... 9
3. A Bad design ....................................................................................................................................... 17
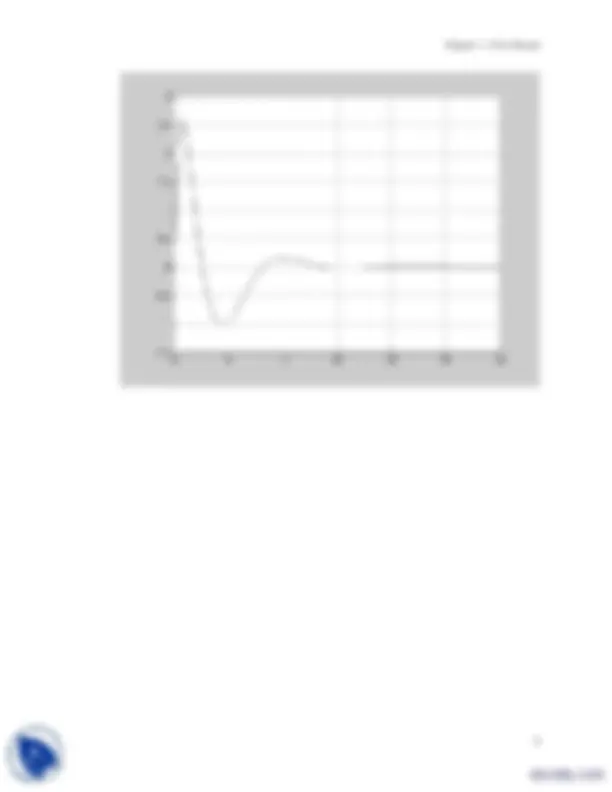
Chapter 1. First Design
Chapter 1. First Design
Chapter 1. First Design
Chapter 1. First Design
Chapter 1. First Design
Chapter 2. Second Design
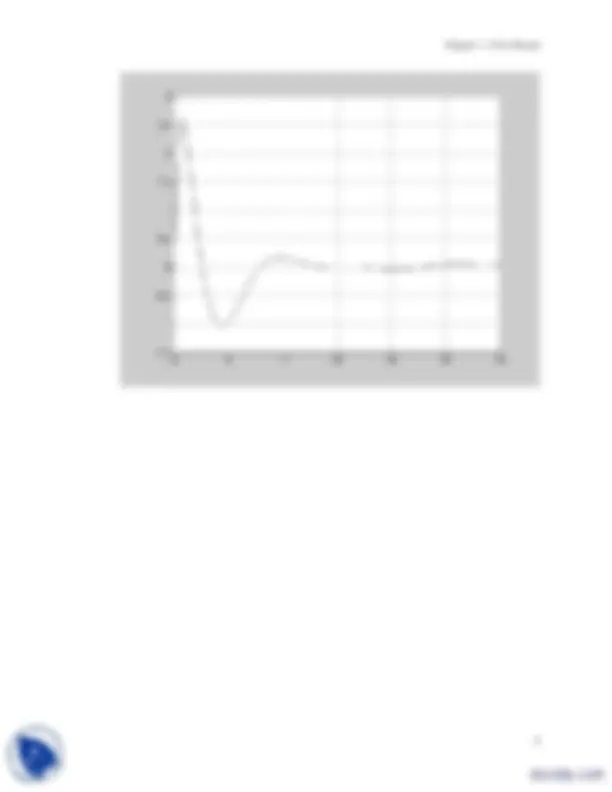
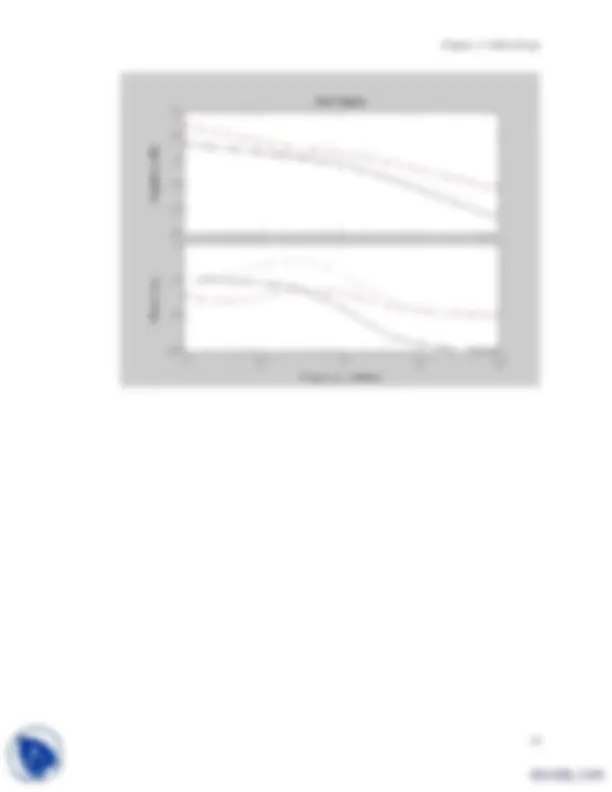
In first design, we put more emphasis on control energy consuption, hence a small T after a small
frequency range. This had resulted into a small control signal. however, a disadvantage was less
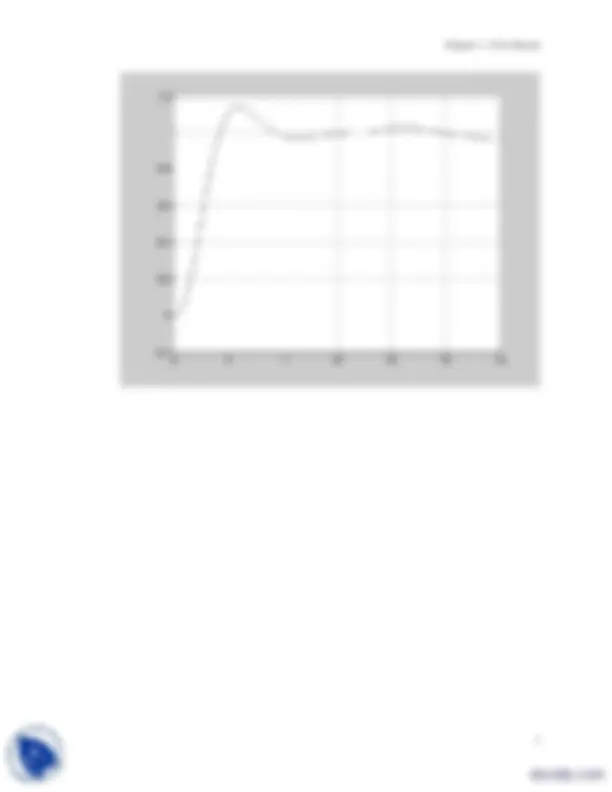
attenuation of disturbance and sluggish response. Now, we would like to pay more emphsis to
disturbance attenuation, i.e., we would like to keep the sensitivity smaller over a wider range of
frequencies. This would result into larger bandwith, which in turn means a large control energy, faster
response. As we know from the waterbed effect, that compression of sensitivity at some frequencies will
result into a peak at other frequencies, hence we also expect a larger overshoot.
Zero/pole/gain: 10 (s+0.1)
s (s+0.01) (s+2) Zero/pole/gain: 100 (s+0.1)^
(s+0.01) (s+2) Zero/pole/gain: 10 (s+0.1)
(s+0.1018) (s^2 + 1.908s + 9.826) Zero/pole/gain: s (s+2) (s+0.01)
(s+0.1018) (s^2 + 1.908s + 9.826)
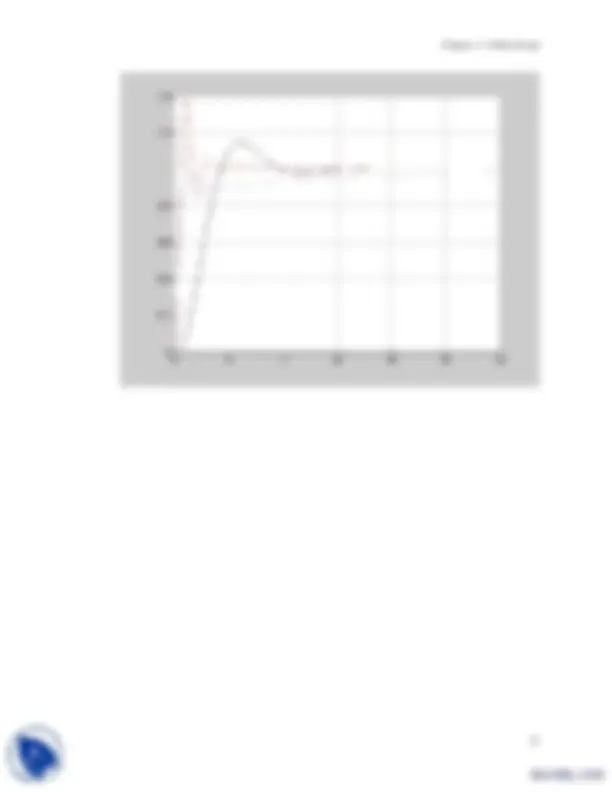
Chapter 2. Second Design
Chapter 2. Second Design
Chapter 2. Second Design
Chapter 2. Second Design
Chapter 3. A Bad design
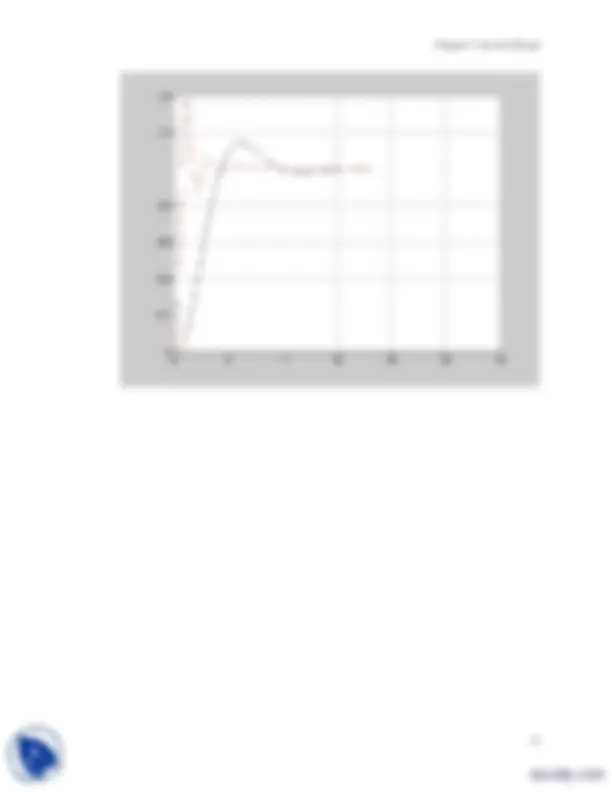
In last section, we tries to improve the disturbance attenuation property of the control system. We could
have compressed the sensitivy at some frequencies using the following loopgain. However, as it is
apparent from the complementary sensitivity function that its magnitude is not 1 at lower frequencies, it
means that there will be a tracking problem with this design. However, the disturbance attenuation will
be achieved, as expected.
Zero/pole/gain: 10 (s+0.1)
s (s+1) (s+2) Zero/pole/gain: 100 (s+0.1)^
(s+1) (s+2) Zero/pole/gain: 10 (s+0.1)
(s+0.08509) (s^2 + 2.915s + 11.75) Zero/pole/gain: s (s+1) (s+2)
(s+0.08509) (s^2 + 2.915s + 11.75)
Chapter 3. A Bad design