


EE 510: Lumped Systems Theory
Fall 2016
Handout 2:
Model Representations of Systems
Prof. Mohamed Zribi
Updated 2 October 2016



















































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The objective of this course is to introduce the students to the basic methods of system theory. Both continuous and discrete time linear systems will be covered. The concepts of stability, controllability and observability are taught. In addition, the design of controllers and observers is discussed.
Typology: Lecture notes
1 / 384

This page cannot be seen from the preview
Don't miss anything!
Updated 2 October 2016
x t ^ ( ) = Ax t ( )
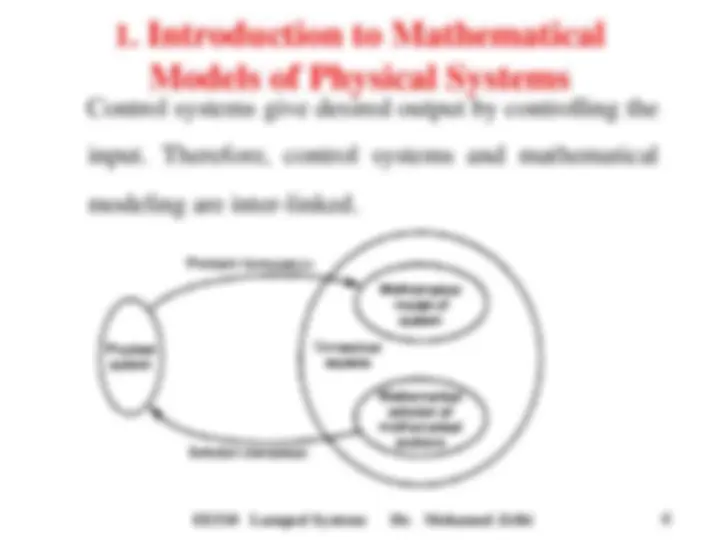
Control systems give desired output by controlling the
input. Therefore, control systems and mathematical modeling are inter-linked.
Mathematical Models of Physical Systems
Why are mathematical models of physical systems needed?
Design of engineering systems can be completed by 1)
trial and error, or 2) by using mathematical models.
Mathematical model gives the mathematical relationships
relating the output of a system to its input.
Physical laws such as Newton’s second law of motion
result in a mathematical model.
Models are used to describe the operation of the plant, including sensors and actuators
Models capture how variables relate to each other The designer needs to pay close attention to how input(s) affects output(s)
The designer needs to use appropriate level of abstraction vs details Note that many types of physical systems share the same math model focus on models
Focus on important variables Use reasonable approximations
Write mathematical equations from physical laws, don’t invent your own Eliminate intermediate variables
Obtain o.d.e. involving input/output variables I/O model Or, obtain 1 st^ order o.d.e.s state space model
Or, obtain I/O transfer function
The classical approach or frequency domain technique is based on converting a system’s differential equation to a transfer function.
It relates a representation of the output to a representation of the input.
It can only be applied to linear, time-invariant systems.
It rapidly provides stability and transient response information.
EE 510 Lumped Systems Theory Dr. Mohamed Zribi (^) 10
It can be used to model and analyze nonlinear
(backlash, saturation), time-varying (missiles with varying fuel levels), multi-input multi-output systems (i.e. an airplane) with nonzero initial conditions.
But it is not as intuitive as the classical approach. The
designer has to engage in several calculations before the physical interpretation of the model is apparent.
EE 510 Lumped Systems Theory Dr. Mohamed Zribi (^) 11
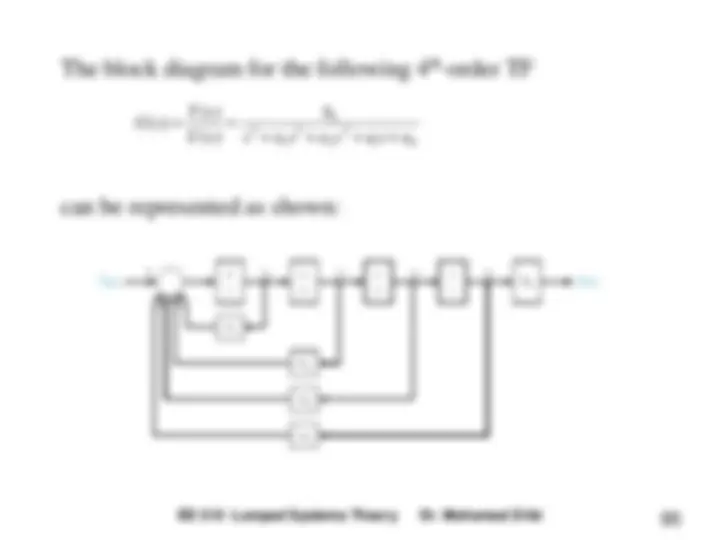
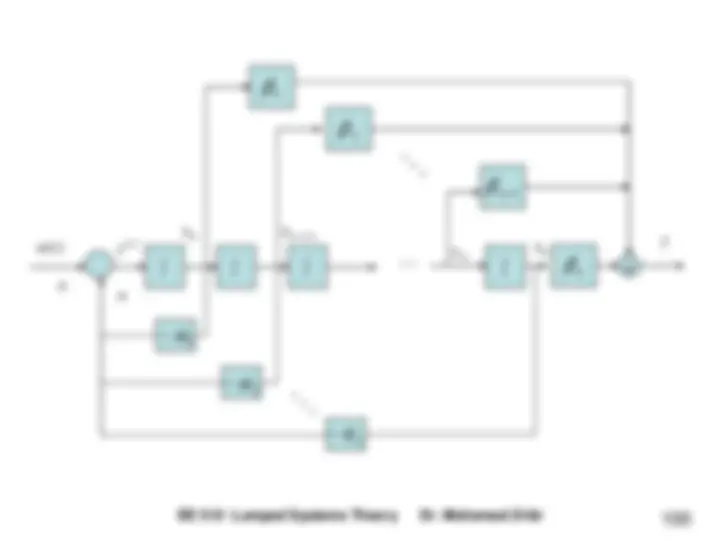
Type 2: Transfer function model:
Using the I/O o.d.e. model, take the Laplace transform
(assuming zero IC): [ ]
[ ]
(^22) 2
( ) ( ), ( ) ( ),
( ) ( ), ( ) ( ), ( ) ( )
y t Y s d y t sY s dt d (^) y t s Y s dt u t U s d u t sU s dt
→ → → → →
L L
L L L
Then, the I/O model in the s-domain becomes:
This is the T.F. model of the system.
or
i.e. the Laplace transform of the output is equal to the Laplace transform input L.T. with gain G(s).
( ) ( ) ( )
( ) ( ) ( ) ( ) 1 0
1 0 1 1 b s U s b sU s b U s
s Y s a s Y s a sY s a Y s m m
n n n
= + + +
1 0
1 1
1 0 ( )
( ) s a s a s a
b s b s b U s
Y s n n
n
m m
= (^) − −
denote = G s ( )
( ) ( ) ( )
G s Y s U s
= Y s ( )^^ = G s U s ( )^ ( )
For linear lumped system, is a rational function. We define that is proper
is strictly proper
is improper
G s ( )
⇔ deg D s ( ) ≥ deg N s ( )
⇔ deg D s ( ) > deg N s ( )
⇔ deg D s ( ) < deg N s ( )
G s ( )
G s ( )
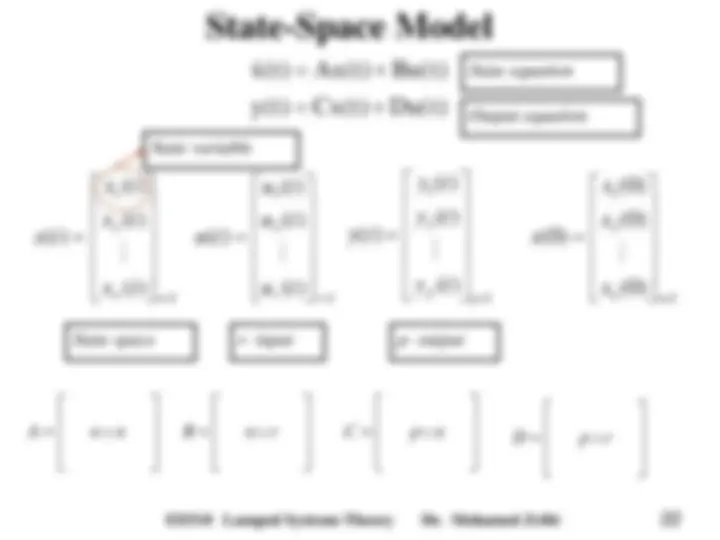
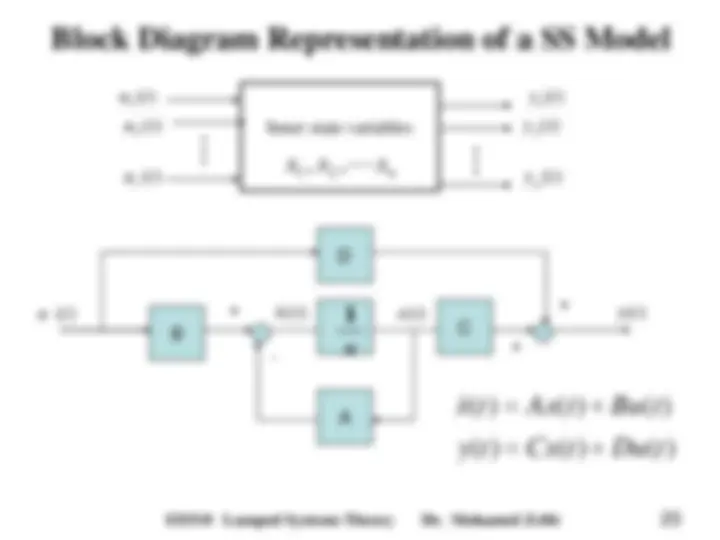
Input equation Output equation
The model of a system is described by a set of first-order
differential equations written in terms of the state variables.