


EE 510: Lumped Systems Theory
Fall 2016
Handout 5:
Design of Controllers
Prof. Mohamed Zribi
Updated 2 October 2016
1






























































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The objective of this course is to introduce the students to the basic methods of system theory. Both continuous and discrete time linear systems will be covered. The concepts of stability, controllability and observability are taught. In addition, the design of controllers and observers is discussed.
Typology: Lecture notes
1 / 298

This page cannot be seen from the preview
Don't miss anything!
Outline of the Handout
A control system consisting of interconnected components is
designed to achieve a desired purpose. To understand the purpose
of a control system, it is useful to examine examples of control
systems through the course of history. These early systems
incorporated many of the same ideas of feedback that are in use
today.
Modern control engineering practice includes the use of control design
strategies for improving manufacturing processes, the efficiency of
energy use, advanced automobile control, including rapid transit, among
Introduction
Block Diagram of a Control System
History
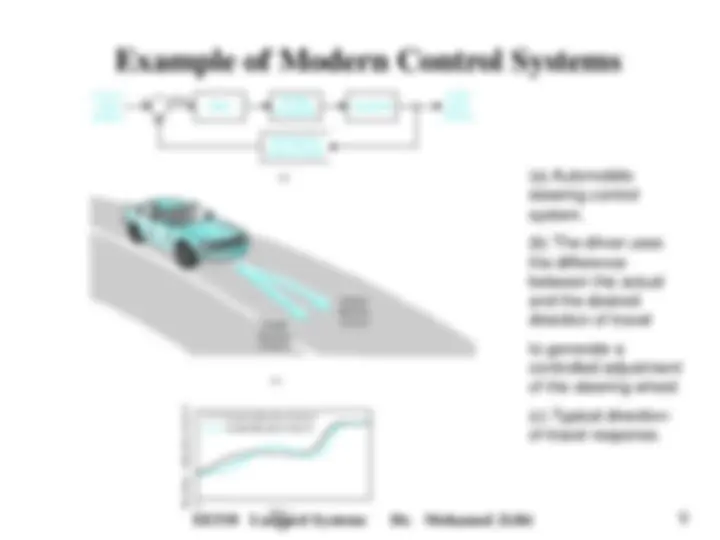
Example of Modern Control Systems
Example of Modern Control Systems
Example of Modern Control Systems
Example of Modern Control Systems
The Future of Control Systems
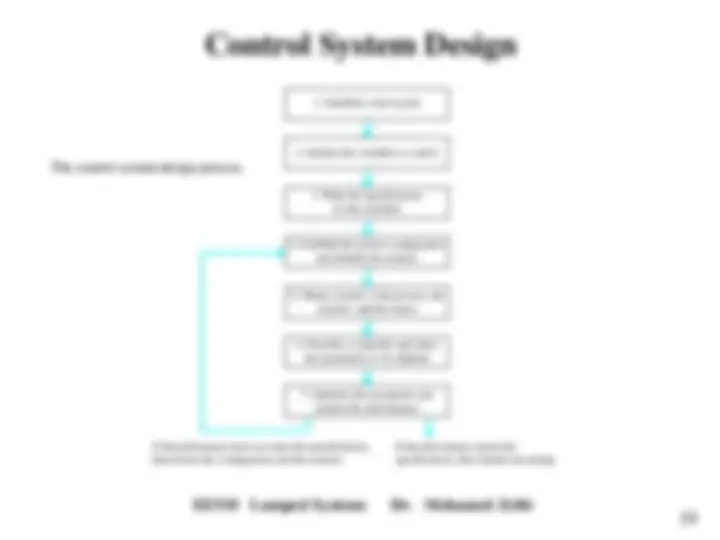
Control System Design
EE510 Lumped Systems Dr. Mohamed Zribi
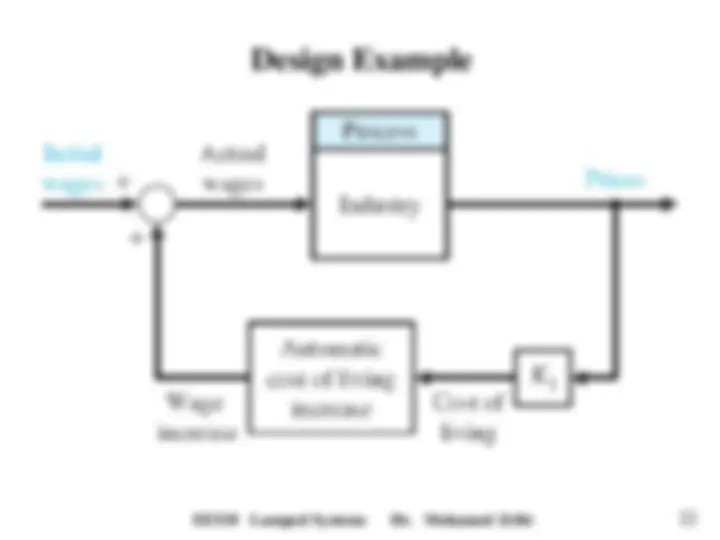
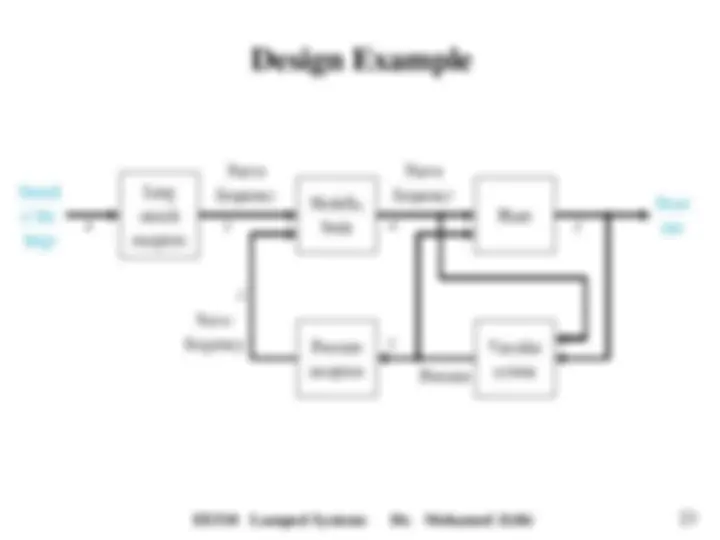
Design Example