Download Multi Objective Evolutionary Algorithms-Applications of Computer Sciences-Project Presentations and more Slides Applications of Computer Sciences in PDF only on Docsity!
Presentation Outline
Introduction
Multi-Objective Evolutionary Algorithms
Techniques for MOEAs
Results
Conclusion
Summary
Introduction
Objective
◦ To develop a toolbox for solving multi-
objective optimization problems with the help
of genetic algorithms
Deliverables
◦ GUI for solving MOP
◦ Toolbox for MOP
◦ Complete project report
MOEAs (Contd..)
Natural choices for solving MOP
Pareto Optimal solutions captured by EA
populations
Allows user to find Pareto-Optimal in
single run
First MOP technique was implemented by
Schaffer
Techniques
Popular approaches by different researchers
◦ Weighted Sum Approach
◦ Schaffer’s Vector Evaluated Genetic Algorithm
(VEGA)
◦ Srinivas and Deb’s Non-dominated Sorting
Genetic Algorithm (NSGA)
◦ Fonseca and Fleming’s Multi-Objective
Genetic Algorithm (MOGA)
◦ Horn, Nafploitis, and Goldberg’s Niched
Pareto Genetic Algorithm (NPGA)
Techniques (Contd..)
◦ Elitist Non-dominated Sorting Genetic
Algorithm (ENSGA)
◦ Distance Based Pareto Genetic Algorithm
(DBPGA)
◦ Thermodynamical Genetic Algorithm (TGA)
◦ Pareto-Achrived Evolution Strategy (PAES)
VEGA
Vector Evaluated Genetic Algorithm
First MOP implemented by Schaffer in
1984 to find set of non-dominated
solution
Called vector evaluated GA because of
evaluation of the objective vectors instead
of scalar objective function
Use an extension of SGA
Only difference b/w VEGA and SGa is in
Selection
VEGA (Contd..)
Advantages
◦ It uses simple idea and is easy to implement
◦ Only small change is required in simple GA
Disadvantages
◦ Every solution is not tested for all other
objective functions
NSGA
Non-dominated Sorting Genetic
Algorithm
Non-domination idea of Goldberg was
implemented by Deb and Srinivas in 1994
Non-dominated genetic algorithms vary
from simple genetic algorithms only in the
way selection operator is used.
NSGA (Contd..)
Ranking individuals on the basis of non-
domination level
◦ Find non-dominated set of solutions
◦ Classified into level of non domination
◦ Number of different non-domination levels
should be varying between 1 to n
NSGA (Contd..)
Fitness Assignment
◦ Fitness assigned to each individuals according
to its level of non-domination
◦ Performed in two steps
Assigning same dummy fitness to all the solutions of
a particular non-domination level.
Applying the Sharing strategy
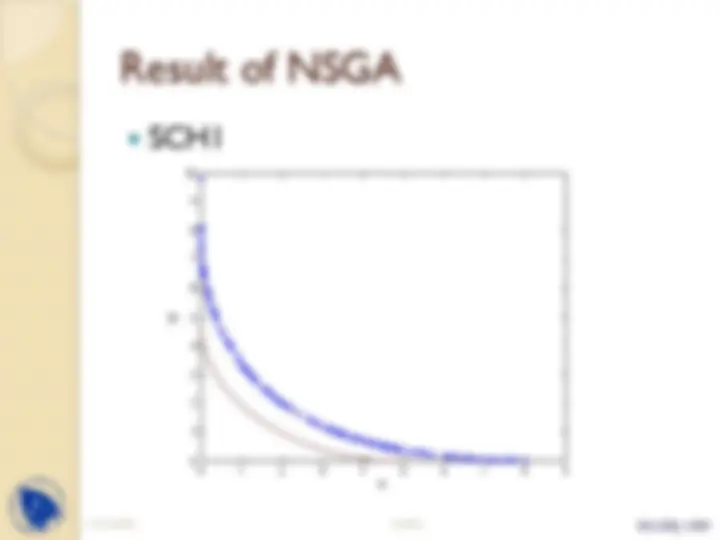
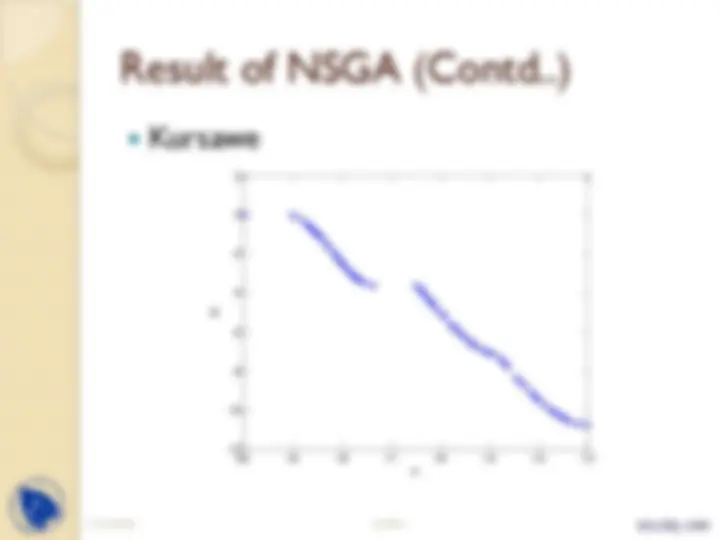
Test Problem
Proposed GA as multi-objective optimizer
Schaffer’s two objective problem
It is shown as:
Test Problem (contd..)
Graph for Schaffer’s problem is:
Range of Pareto-optimal solution is [0,2]
(^0) -5 -4 -3 -2 -1 0 1 2 3 4 5
5
10
15
20
25
30
35
40
45
50
Variable x
Ftiness f1, f
f f
Result of VEGA
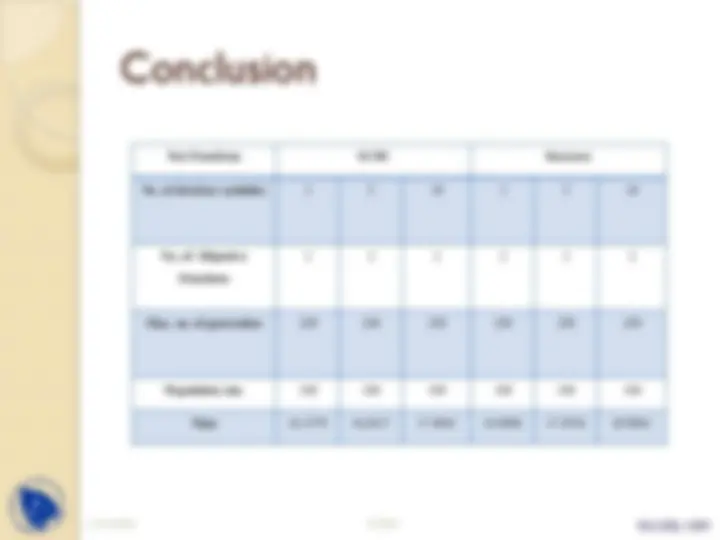
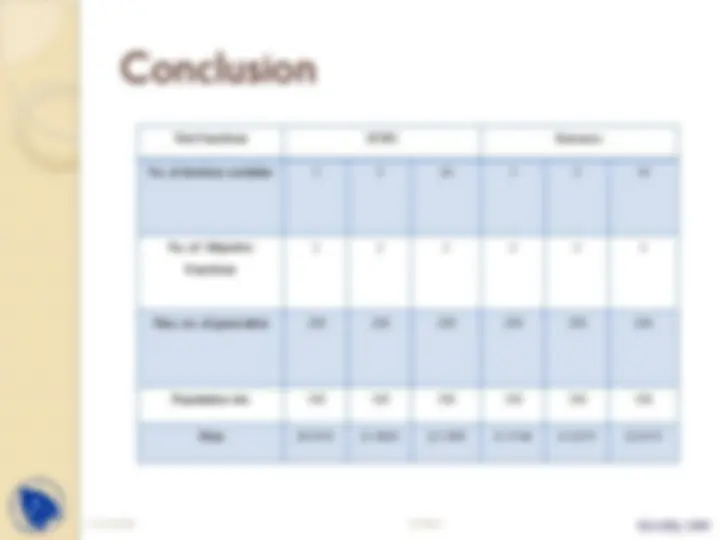
Conclusion
Test Functions SCH1 Kursawe
No. of decision variables 3 5 10 3 5 10
No. of Objective Functions
Max. no. of generation 250 250 250 250 250 250
Population size 100 100 100 100 100 100 Time 16.1579 16.8417 17.4043 16.8906 17.5938 20.