



Presentation layout
Introduction
Scope
Applications
Summary of previous work
Mean shift technique
Fast Mean Shift Technique
Comparison
Time Line
Future work
Conclusion
docsity.com







Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An overview of object detection and tracking in videos, focusing on mean shift and fast mean shift techniques. The concept of object detection and tracking, the scope of motion understanding and tracking, applications, summary of previous work, mean shift and fast mean shift algorithms, and experimental results. The techniques find applications in various fields such as vision-based control systems, human-computer interfaces, medical imaging, augmented reality, robotics, and more.
Typology: Slides
1 / 30

This page cannot be seen from the preview
Don't miss anything!
Introduction Scope Applications Summary of previous work Mean shift technique Fast Mean Shift Technique Comparison Time Line Future work Conclusion
The basic concept behind object detection in videos engrosses:
Verification of the presence of an object. Locating it in particular for recognition.
Object’s temporal and spatial changes are measured during a sequence of images by solving the temporal correspondence problem
Some of the applications are
Target tracking using video sensors Assistance for handicapped people Traffic monitoring Drivers assistance ,Traffic signs recognition Medical Imaging Medical image quantization and analysis Military applications Missile tracking ,jet tracking Video surveillance Security systems
Background Subtraction Method
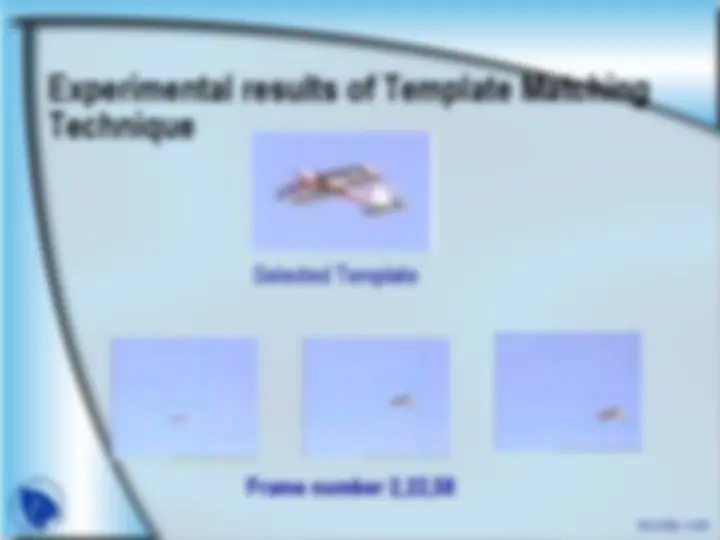
Template matching technique Performing a normalized cross-correlation between a template image and a new image
These figures show the results of background subtraction algorithm i.e. frame differencing applied on a sequence of images
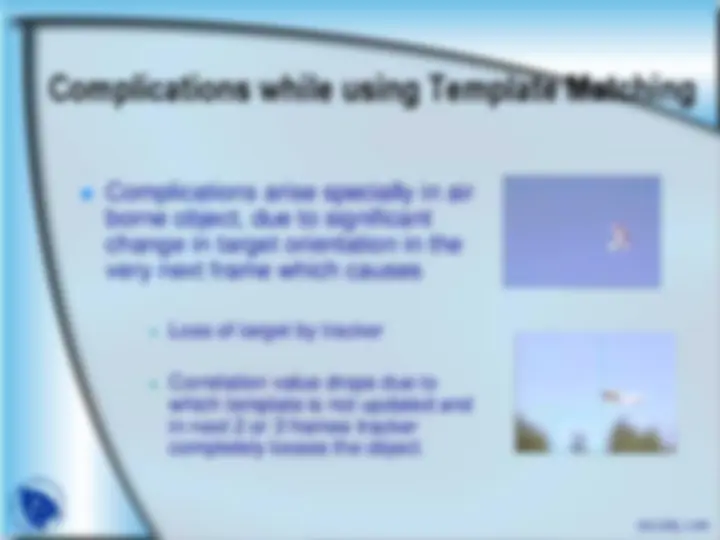
Complications arise specially in air borne object, due to significant change in target orientation in the very next frame which causes
Loss of target by tracker
Correlation value drops due to which template is not updated and in next 2 or 3 frames tracker completely looses the object.
The Mean Shift algorithm is a non parametric technique used to locate density extrema or modes of a given distribution by an iterative procedure
The Mean Shift algorithm is a mode-seeking process on the density function surface
The difference image generated from given image sequence is contains large number of high-intensity peaks or modes. Our principal objective is to find modes representing our desired object. The search process is facilitated by information of expected scaling of object {H(yi),W(yi)}
Step 1: The difference image intensity maximum is mapped to unit intensity
Step 2: A sample set of n points X1 ….... Xn is defined by locating local maxima
Finding local maxima
Locating the global intensity maximum and adding it to the list of sample set Resetting the difference image intensity Repeating the maximum search of step (1) until the found maximum drops below a threshold T
Step 4: The convergence points of individual mean shift procedures are linked together forming the centers of detected clusters The convergence trajectories leading to the cluster center defines the paths of the cluster. Step 5: A bounding box around the cluster path gives a simple representation the region covered by the cluster.
The convergence speed of Fast Mean Shift is faster than that of Mean Shift. Basic motivation comes from the idea that in the case of linear operations (e.g. ), any invertible linear operation can be applied to f or g if its inverse is applied to the result. As in convolution, if derivative operator is applied both to the image and the kernel the result must then be double integrated. f g ( f '^ * g ')
The integral image at a location (x,y) contains the cumulative sum of pixels located to the left and above (x,y) including the pixel (x,y) :
' '
' ' int ,
x x y y
Using the integral image, the area sum of a rectangular region within the original image can be efficiently computed by the following step
Sarea is the area sum within the rectangle