



Presentation layout
Introduction
Scope
Summary of previous work
Comparison
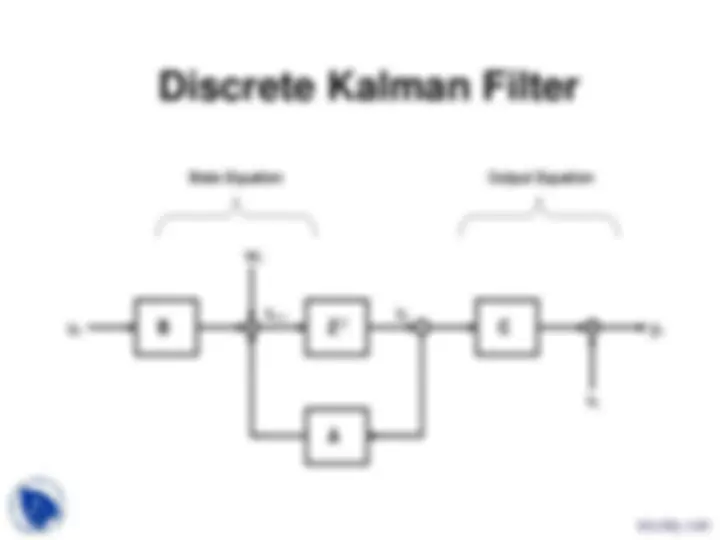
Kalman Filter
Time Line
Future work
Conclusion
docsity.com












Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This presentation covers the concept of object detection and tracking in videos, focusing on the temporal and spatial changes of objects. It discusses the scope and applications of motion understanding and tracking, and provides a comparison between template matching and mean shift algorithms, as well as an introduction to the kalman filter. The document also includes experimental results and a discussion on future work.
Typology: Slides
1 / 33

This page cannot be seen from the preview
Don't miss anything!
The basic concept behind object detection in videos engrosses:
Verification of the presence of an object. Locating it in particular for recognition.
Object’s temporal and spatial changes are measured during a sequence of images by solving the temporal correspondence problem
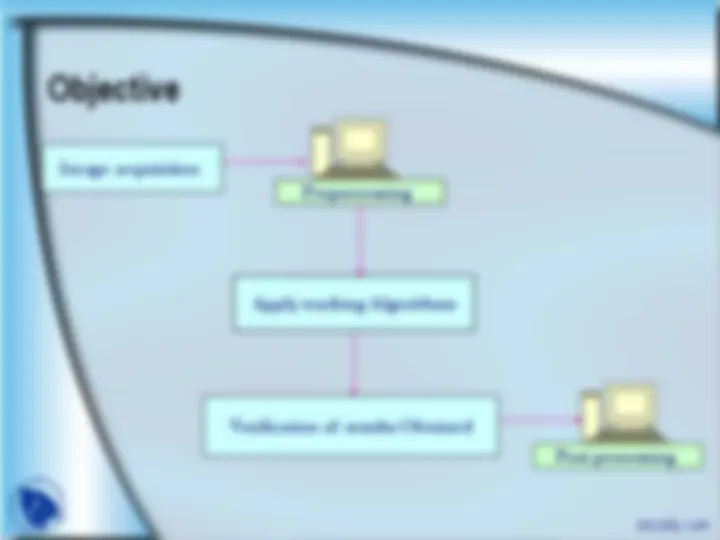
Image acquisition Preprocessing
Apply tracking Algorithms
Verification of results Obtained Post processing
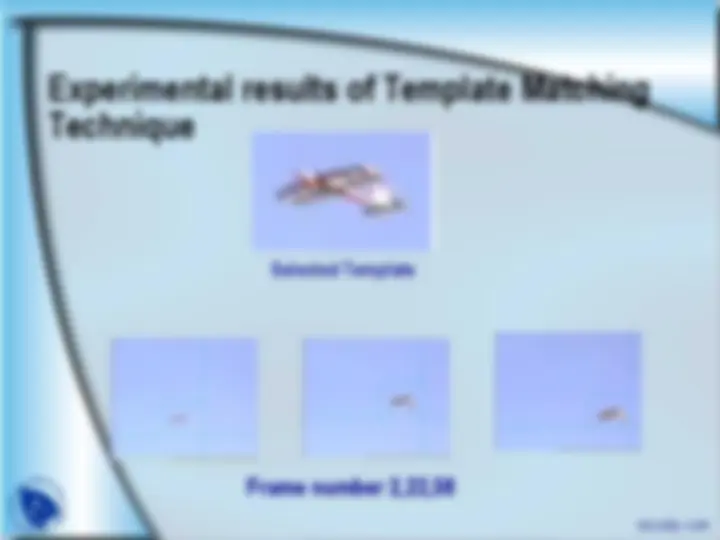
These figures show the results of background subtraction algorithm i.e. frame differencing applied on a sequence of images
Selected Template
Frame number 2,22,
The Mean Shift algorithm is a non parametric technique used to locate density extrema or modes of a given distribution by an iterative procedure
The Mean Shift algorithm is a mode-seeking process.
The convergence speed of Fast Mean Shift is faster than that of Mean Shift. Basic motivation comes from the idea that in the case of linear operations (e.g. ), any invertible linear operation can be applied to f or g if its inverse is applied to the result. As in convolution, if derivative operator is applied both to the image and the kernel the result must then be double integrated its far more complex.
Template Matching
Mean Shift
Template Matching
Mean Shift