Objectives
Objectives
Truck will operate at constant velocity
Truck will operate at constant velocity
Use encoder subprogram
Use encoder subprogram
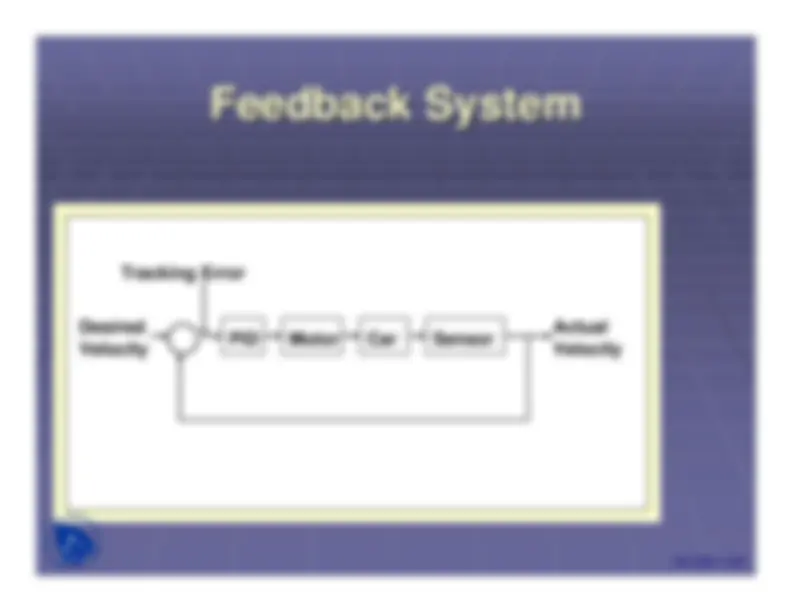
PID controller
PID controller
Track will be adjustable
Track will be adjustable
3% hill grade
3% hill grade
6% hill grade
6% hill grade
docsity.com