



Numerical Methods for Partial
Differential Equations
Docsity.com





























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The analysis of difference operators in numerical methods using gershgorin's theorem and fourier transform. It covers the eigenvalue problems of right and left shift matrices, the diagonalizing property of the fourier transform on polynomials of shift matrices, and the interpretation of multipliers in the odes for each discrete fourier mode. The document also compares the accuracy and behavior of different difference operators.
Typology: Slides
1 / 41

This page cannot be seen from the preview
Don't miss anything!
3 2
ν
z = re^ i^ θ^ ν
t n
u u c t x
∂ ∂
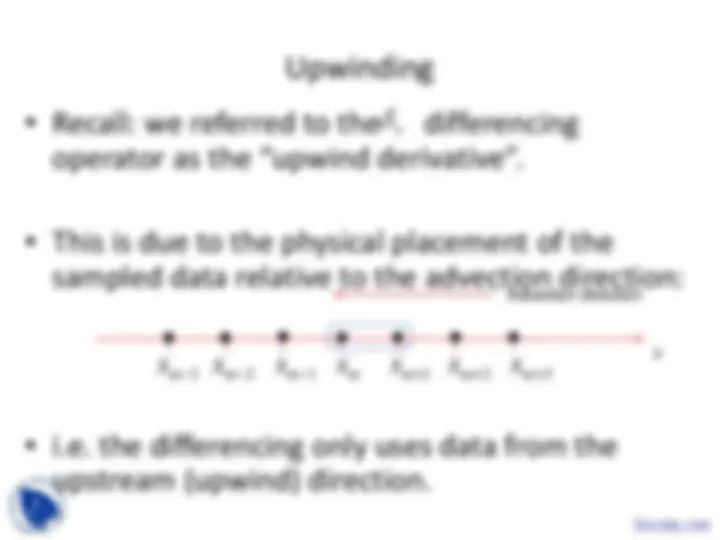
xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
Docsity.com
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
m m
= δ (^) +
0 0 1 1 2 2
9 9
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
u u u u u u
d c dx dx
u u
(^) − (^) (^) − (^) − (^) − (^) (^) − = (^) − (^) (^) − (^) − (^) (^) − (^) −
Note: I used indexing from zero to match with classical definitions coming up.
1 1 2 2
9 9
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
u u u u u u
d c dx dx
u u
− (^) − (^) (^) − (^) (^) − (^) (^) − = (^) − (^) − (^) − (^) (^) − −
δ (^) +
Docsity.com
ˆ where^ :
if 1
if 1
u u e
u n M u u n M
= − (^) −^ π
= =
<^ − = =^ −
∑ F^ F
R
( )
c c u u u dx
= (^) ∑ R − I =
(^) or ( )
c u u dx
matrix is:
indicates that this is addition modulo M
( )
( )
1
1 1 2 2 1, 0 0 1 2 2 1
0 2 1 2 2
0 2
1
1
nm M M i^ nj^ i^ mk M M j k j k M i^ nj i^ m^ j M M j i m M M i^ nj^ i^ mj M M j i m M nm
e e M
e e M
e e e M
e
π π
π^ π
π π π
π
δ
δ
−
− − (^) −
= = − (^) − +
=
− (^) −
=
=
=
=
=
∑ ∑
∑
∑
FRF
eigenspectrum:
Fourier matrix and that
( )
nm e nm
π
FRF =
( )
c (^) 1 v v dx
F R − I F =
1 for 0,..., 1
c (^) e M m M
dx
π
= (^) − (^) = −
δ (^) +
m m
= δ (^) −
0 0 1 1 2 2
9 9
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
u u u u u u
d c dx dx
u u
(^) − (^) (^) − (^) − (^) − (^) (^) − = (^) − (^) (^) − (^) − (^) (^) − (^) −
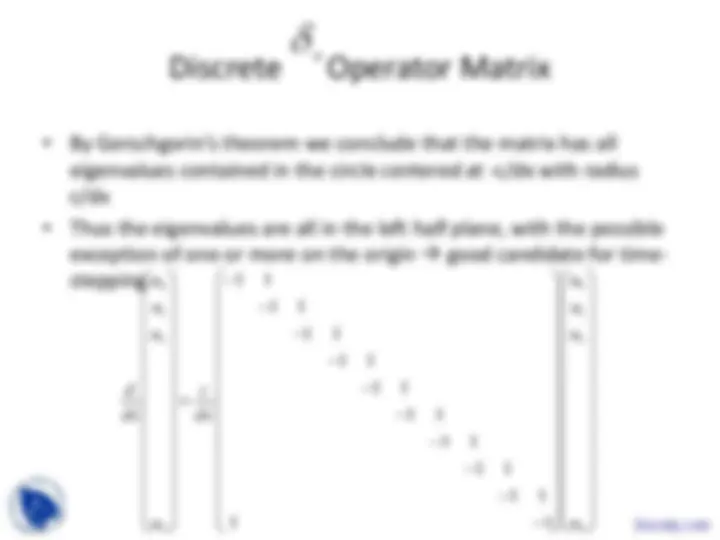
eigenvalues are all in a disk centered at +c/dx with radius c/dx.
apart from the possiblity of a subset which are at the origin.
stepping operator (and clearly not physical)
π
i.e. the Fourier (similarity) transform of the
left shift matrix is a diagonal matrix
0 0
r p j k jk j k
∑∑ R L
(^1) ( 1 ) ( 1 ) 0 0
r p j k jk j k
− − − = =
F (^) ∑∑ FRF FLF F
( ) ( )
( )
1 1 1 0 0 2 2 2
0 0 0 0
r p j k jk j k r p i^ mj^ i^ mk r p i^ m j^ k m (^) M M M jk m jk m j k j k
π π π
− − − = = − −
= = = =
∑∑
∑∑ ∑∑